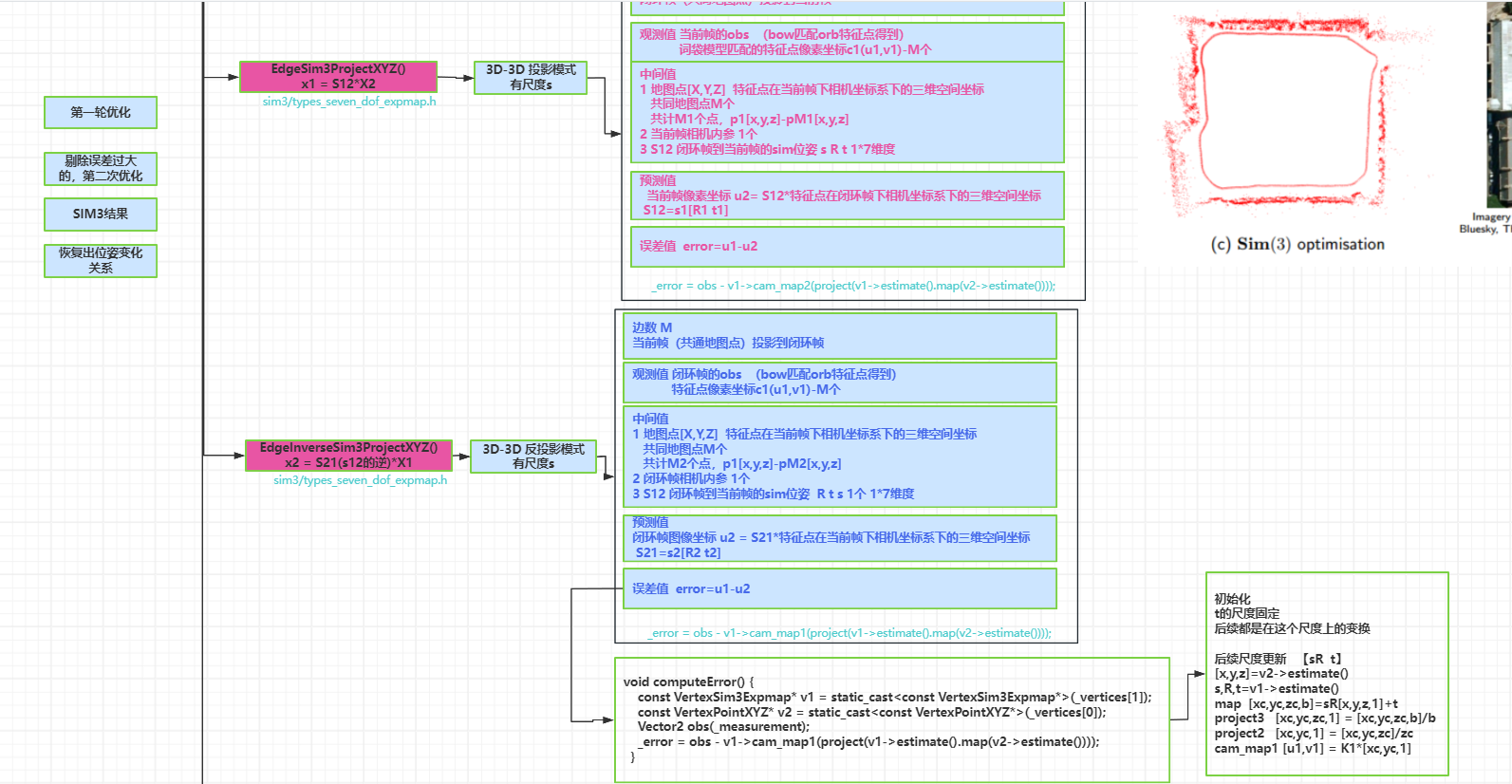
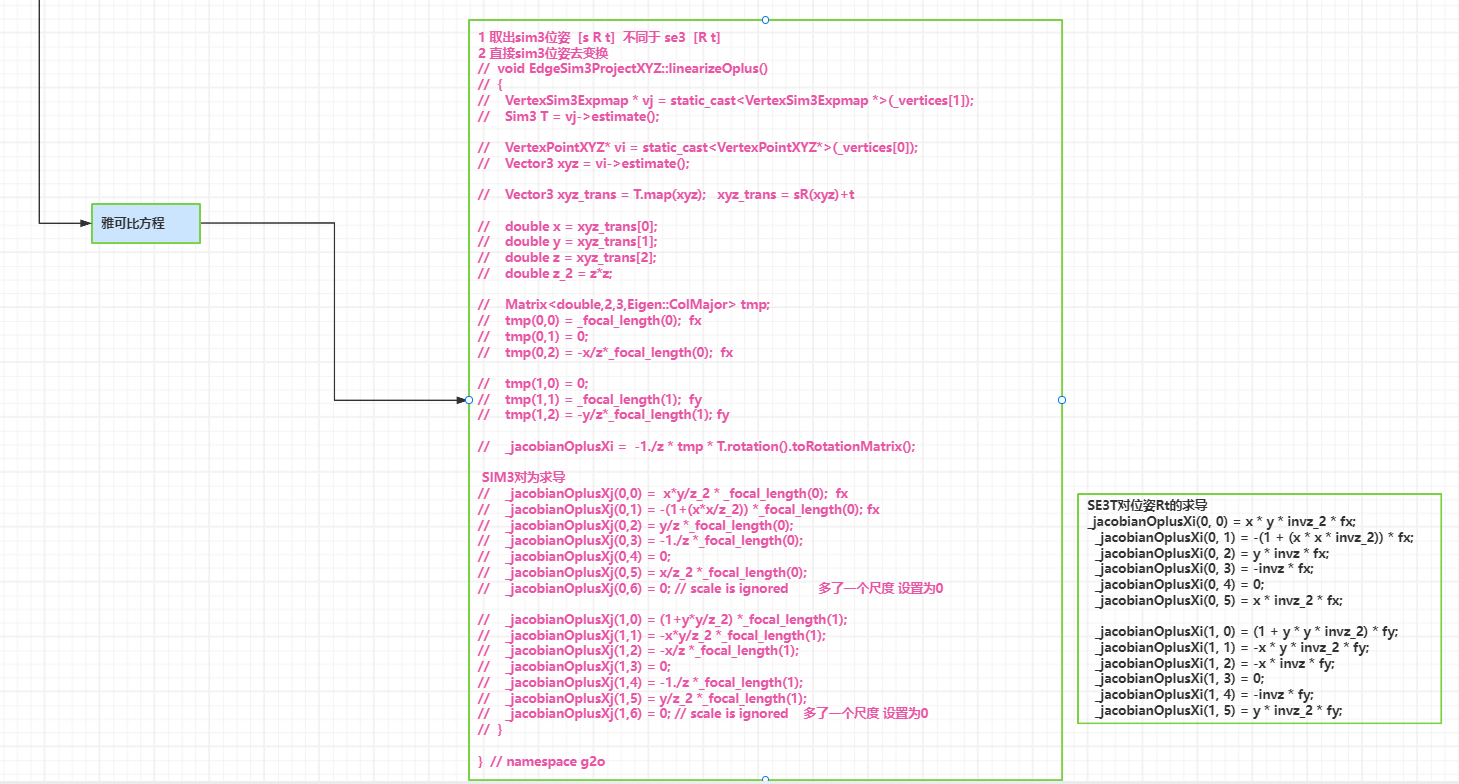
不用于前面的3D-位姿,这里的地图点投影到了相机归一化世界坐标系,然后相互投影重投影误差 本栏目推荐文章深入理解spring框架:剖析多线程模式下数据库连接地图OpenCV计算机视觉学习(15)——浅谈图像处理的饱和运算和取模运算分享uniapp移动端和h5项目如何使用谷歌地图机器视觉 - YoloV8 命令行安装OpenCV - 计算机视觉开发golang进程(主线程)与协程多线程(Java.Thread)学习threading库设置最大线程MapOnline在线地图插件升级——修复部分地图不能使用的问题闭环 线程 orb-slam 视觉 地图闭环 线程orb-slam视觉 全局orb-slam视觉slam orb-slam视觉slam orb 全局orb-slam视觉 代码 回环slam线程 视觉 线程 视觉 orb-slam orb-slam slam orb imu orb-slam ubuntu 18.04 slam 算法orb-slam流程 整体