https://howtomechatronics.com/tutorials/arduino/how-to-control-stepper-motor-with-a4988-driver-and-arduino/
A4988 步进驱动器引脚分配
现在让我们仔细看看驱动器的引脚排列,并将其与步进电机和控制器连接起来。因此,我们将从按钮右侧的 2 个引脚开始为驱动器供电,我们需要将它们连接到 3 至 5.5 V 的电源,在我们的例子中,这将是我们的控制器 Arduino提供 5 V 电压的板。以下 4 个引脚用于连接电机。1A 和 1B 引脚将连接到电机的一个线圈,2A 和 2B 引脚将连接到电机的另一个线圈。为了给电机供电,我们使用接下来的 2 个引脚(接地和 VMOT),我们需要将它们连接到 8 至 35 V 的电源,并且我们还需要使用至少 47 µF 的去耦电容器来保护驱动板免受电压尖峰的影响。
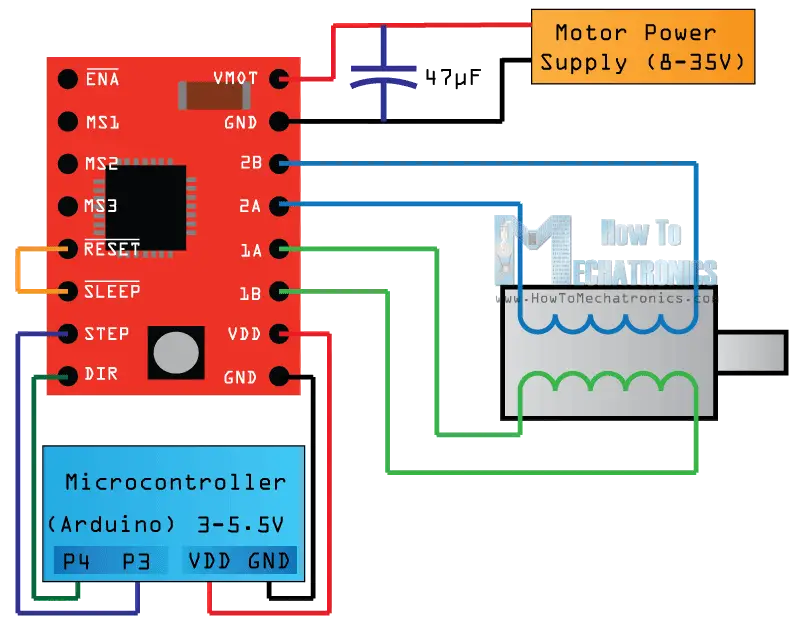
接下来的两个 2 引脚(步长和方向)是我们实际用于控制电机运动的引脚。方向引脚控制电机的旋转方向,我们需要将其连接到微控制器上的数字引脚之一,或者在我们的例子中,我将其连接到 Arduino 板的引脚 4。
通过步进引脚,我们可以控制电机的微步,并且随着发送到该引脚的每个脉冲,电机移动一步。这意味着我们不需要任何复杂的编程、相序表、频率控制线等,因为 A4988 驱动程序的内置转换器会处理所有事情。这里我们还需要提到的是,这两个引脚内部没有上拉任何电压,所以我们不应该让它们在我们的程序中悬空。
接下来是睡眠引脚,逻辑低电平使电路板进入睡眠模式,以最大限度地减少电机不使用时的功耗。
接下来,RESET 引脚将转换器设置为预定义的起始状态。该起始状态或起始微步位置可以从 A4988 数据表中的这些图看出。因此,这些是电机启动的初始位置,它们根据微步分辨率而有所不同。如果该引脚的输入状态为逻辑低电平,则所有 STEP 输入都将被忽略。复位引脚是一个浮动引脚,因此如果我们不想在程序中控制它,我们需要将其连接到睡眠引脚,以便将其拉高并启用电路板。
接下来的 3 个引脚(MS1、MS2 和 MS3)用于根据上述真值表选择五步分辨率之一。这些引脚具有内部下拉电阻,因此如果我们将它们断开,电路板将以全步模式运行。
最后一个 ENABLE 引脚用于打开或关闭 FET 输出。因此,逻辑高电平将使输出保持禁用状态。
电路原理图
这是完整的电路原理图。我将在全步模式下使用驱动器,因此我将断开 3 个 MS 引脚,仅将驱动器的方向和步进引脚连接到 Arduino 板上的引脚 3 和 4,以及接地和 5 V为电路板供电的引脚。此外,我将使用 100μF 电容器进行去耦,并使用 12V、1.5A 适配器为电机供电。我将使用 NEMA 17 双极步进电机,其电线 A 和 C 将连接到引脚 1A 和 1B,B 和 D 线将连接到 2A 和 2B 引脚。


Arduino 和 A4988 代码
这是一个示例代码。首先,我们必须定义步长和方向引脚。在我们的例子中,它们是 Arduino 板上的引脚 3 和 4,它们被命名为 stepPin 和 dirPin,并且我们必须在设置部分将它们定义为输出。
控制旋转方向:为了控制电动机的旋转方向,我们将DIR引脚设置为HIGH或LOW。高输入将使电动机顺时针旋转,而低输入将使电动机逆时针旋转。
控制速度:电动机的速度取决于我们发送到STEP引脚的脉冲的频率。脉冲越高,电动机运行得越快。脉冲不过是将输出拉为高电平,等待一会儿,然后将其拉低,然后再次等待。通过更改两个脉冲之间的延迟,可以更改这些脉冲的频率,从而更改电动机的速度。
Arduino代码–使用AccelStepper库
在没有库的情况下控制步进器非常适合简单的单电机应用。但是,如果要控制多个步进器,则需要一个库。
因此,在下一个实验中,我们将使用称为AccelStepper库的高级步进电机库。它支持:
- 加减速。
- 多个同时步进器,每个步进器具有独立的并发步进。
该库未包含在Arduino IDE中,因此您需要首先安装它。
库安装
要安装库,请导航至“草图”>“包含库”>“管理库...”,等待库管理器下载库索引并更新已安装库的列表。

输入“ accelstepper”以过滤搜索。单击第一个条目,然后选择“安装”。

Arduino代码
这是一个简单的草图,它使步进电机沿一个方向加速,然后减速以使其静止。电动机旋转一圈后,它将改变旋转方向。而且它会不断地重复这样做。