一些概念
\(\bf{\underline{网络}}\):是一个特殊的有向图 \(G=(V,E)\),它包含:
-
源点 \(s\),汇点 \(t\)\((s \ne t)\)。
-
每条边 \(e(u,v)\) 都有一个容量 \(c(u,v)\)。
\(\bf{\underline{流}}\):就像水流,把每条边想象成管道,流就是流过其中的水,从网络源点 \(s\) 流向汇点 \(t\),需要保证每条边上的流 \(f(u,v)\) 不超过其容量,其满足以下性质:
- \(\bf{\underline{容量限制}}\):\(f(u,v) \leq c(u,v)\)。
- \(\bf{\underline{流守恒}}\):除源点和汇点外,任意点的净流量为0。
\(\bf{\underline{净流量}}\):定义节点 \(u\) 的净流量 \(f(u)=\sum\limits_{v \in V}f(u,v)-\sum\limits_{v \in V}f(v,u)\)。
定义一个网络上的流 \(f\) 的流量 \(|f|=f(s)=-f(t)\)。
\(\bf{\underline{割}}\):令 \({S,T}\) 为 \(V\) 的划分(\(S\cup T\) 且 \(S\cap T=\varnothing\)),且 \(s\in S,t\in T\),则称 \({S,T}\) 为该网络的一个割,定义其容量 \(||S,T||=\sum\limits_{u\in S}\sum\limits_{v\in T}c(u,v)\)。
常见问题:
-
\(\bf{\underline{最大流问题}}\):找到给定网络的一个合适的流 \(f\),使得该流的流量尽可能大,称 \(f\) 为最大流。
-
\(\bf{\underline{最小割问题}}\):找到给定网络的一个合适的割 \({S,T}\),使得该割的容量尽可能小,称 \({S,T}\) 为最小割。
-
\(\bf{\underline{最小费用最大流问题}}\):给定网络,给定每条边一个费用 \(w(u,v)\),即单位流量通过该边所花费的代价,对所有可能的最大流,找出一条费用最小的,称为最小费用最大流。
网络最大流
Ford-Fulkerson 思想
Ford-Fulkerson 是网络流的一个重要思想,接下来的算法都是基于该思想的优化,弄明白了 Ford-Fulkerson 增广的原理,其他的就好说了。
先来几个概念:
\(\bf{\underline{增广路}}\):一条从 \(s\) 到 \(t\) 的剩余流量非空的路径,它是用来扩充网络最大流的。
\(\bf{\underline{残留网络}}\):令 \(c(u,v)\) 等于其剩余流量,然后把所有剩余流量为 \(0\) 的边删掉后的网络。
流程:
- 初始时所有边的流量均为 \(0\)。
- 增广:找到一条从 \(s\) 到 \(t\) 的简单路径,按照流的性质,找到这条路径上的最大流,更新每条边的残余容量,(可以等价于减少该边的容量,当该边容量减为 \(0\) 则说明该边已满流),更新残留网络。
- 重复步骤 \(2\),直到找不出一条路径。
但这样基于贪心的策略并不一定最优,原因是当前增广的路径会对以后的增广产生影响,如下图:
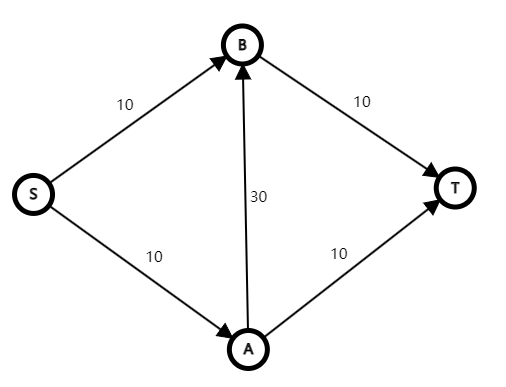
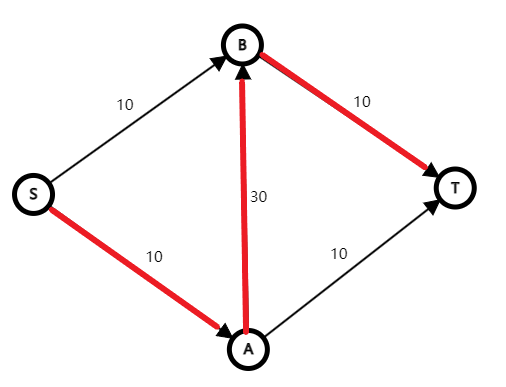
我们第一次增广路径 \(S \to A \to B \to T\),更新最大流为 \(10\)。
这样我们增广出来的最大流容量为 \(10\),但显然 \(S\to B\to T\) 和 \(S\to A\to T\) 能增广出来 \(20\)。
如何消除这种影响?
我们在对每条边补充一个反向边,初始时权值为 \(0\),对于每次增广的边,在减少原边容量的同时,增加反向边的容量,这样有啥用?
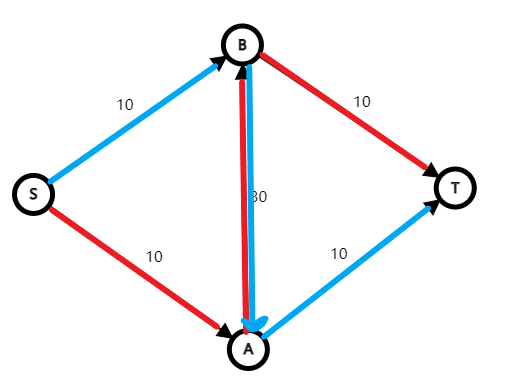
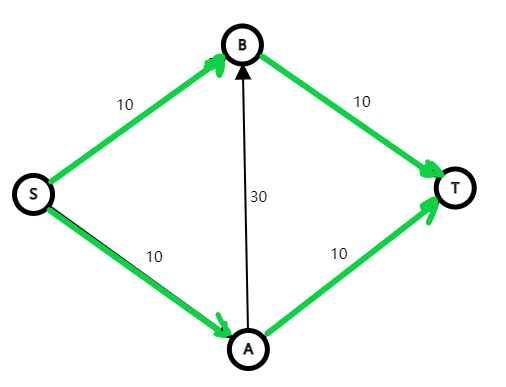
可以发现,这样我们就可以在原来的残留网络上再进行一次增广,得到最大流容量为 \(20\),其中 \((u,v)\) 这条边,正着流了一次,反着流了一次,相当于最大流根本不流经该边,实际上等于:
发现这样是遵循流量守恒的。
时间复杂度是值域级别,原因:
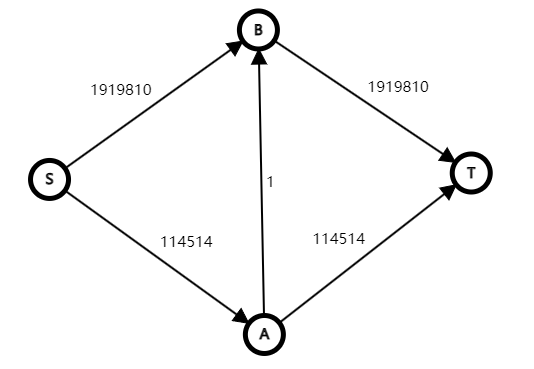
最大流是 \(114514+1919810=\) 不知道多少,然而如果我们每次只增广 \(A\to B\) 路径,就要增广不知道多少次。
Edmonds-Karp 算法
基于 Ford-Fulkerson 的优化,每次增广最短路,让复杂度有了保证。
每条边的长度为 \(1\),所以求的是 \(01\) 最短路,BFS 复杂度 \(\mathit{\Theta}(E)\)。
复杂度证明:
每次增广出的路径会使至少一条边的剩余容量减为零,称该边为关键边
因为每次找的是最短路,在残留网络中删除关键边,所以增广路的长度是单调不减的,且不超过 \(V\),所以最坏情况下每条边最多被增广 \(V\) 次,单次增广复杂度 \(E\),所以总复杂度 \(\mathit{\Theta}(VE^2)\)。
实现:
struct node{
int w,v,nxt;
}e[M<<1];
int head[M],cnt=1;
il void add(int u,int v,int w){
e[++cnt].v=v;
e[cnt].w=w;
e[cnt].nxt=head[u];
head[u]=cnt;
}
int n,m,s,t;
int pre[M],dis[M];
queue<int> q;
il int bfs(){
for(int i=1;i<=n;i++)pre[i]=0,dis[i]=1145141919;
q.push(s);
while(!q.empty()){
int x=q.front();q.pop();
for(int i=head[x];i;i=e[i].nxt){
int y=e[i].v;
if(pre[y]||y==s||!e[i].w)continue;
q.push(y);
dis[y]=min(dis[x],e[i].w);
pre[y]=i;
}
}
if(!pre[t])return -1;
return dis[t];
}
main(){
n=read(),m=read(),s=read(),t=read();
for(int i=1;i<=m;i++){
int u=read(),v=read(),w=read();
add(u,v,w);
add(v,u,0);
}
ll ans=0;
while(true){
int k=bfs();
if(k==-1)break;
ans+=k;
int now=t;
while(now!=s){
e[pre[now]].w-=k;
e[pre[now]^1].w+=k;
now=e[pre[now]^1].v;
}
}
cout<<ans;
return 0;
}
Dinic 算法
EK 算法在稠密图是 \(n^5\) 级别的,能不能继续优化?
我们发现 EK 每次bfs只能增广出一条增广路,所以慢了,能不能一次性找出多条。
Dinic 算法的思想就是一次找出所有最短路,全跑了。
按其DFS深度将网络分层,然后一遍DFS跑完全图最短路,即只走跨层的边。
这样就复杂度就少了一个 \(E\),是 \(\mathit{\Theta}(VE)\) 的吗?不是,因为一个点会被经过多次。
两个优化:
-
对增广完的点剪枝:把剩余容量为 \(0\) 的点深度置为-1,说明该点无法在当前分层图上做出贡献,就不要再访问它了。
-
当前弧优化:记录数组 \(now[u]\) 改变枚举边的起点。对于点 \(u\),当增广到它的第 \(i\) 条边时,前 \(i-1\) 条边到汇点的流量已经被用完了,访问了也没用,就不用再访问了,它保证了每条边最多只会被访问一次。
Dinic时间复杂度上限是 \(\mathit{\Theta}(V^2E)\) 的,证明见 OI wiki ,我不会。
但实际上并不会跑满,出题人只要有 ma 就不会卡。。
实现:
#include <bits/stdc++.h>
using namespace std;
#define il inline
#define ll long long
#define int long long
il ll read(){
ll x=0,f=1;char ch=getchar();
while(ch<'0'||ch>'9'){if(ch=='-')f=-1;ch=getchar();}
while(ch>='0'&&ch<='9'){x=(x<<1)+(x<<3)+(ch^48);ch=getchar();}
return x*f;
}
const int M=5010;
const ll inf=1ll<<60;
struct node{
int v,nxt;
ll w;
}e[M<<1];
int head[M],cnt=1;
il void add(int u,int v,ll w){
e[++cnt].v=v;
e[cnt].w=w;
e[cnt].nxt=head[u];
head[u]=cnt;
}
int n,m,s,t;
int dep[M],now[M];
queue<int> q;
il bool bfs(){
while(!q.empty())q.pop();
for(int i=1;i<=n;i++)dep[i]=-1;
dep[s]=0;
q.push(s);
now[s]=head[s];
while(!q.empty()){
int x=q.front();
q.pop();
for(int i=head[x];i;i=e[i].nxt){
int y=e[i].v;
if(e[i].w>0&&dep[y]==-1){
q.push(y);
now[y]=head[y];
dep[y]=dep[x]+1;
if(y==t)return 1;
}
}
}
return 0;
}
int dfs(int x,ll sum){
if(x==t)return sum;
ll k,flow=0;
for(int i=now[x];i&∑i=e[i].nxt){
now[x]=i;
int y=e[i].v;
if(e[i].w>0&&(dep[y]==dep[x]+1)){
k=dfs(y,min(sum,e[i].w));
if(k==0)dep[y]=-1;
e[i].w-=k;
e[i^1].w+=k;
flow+=k;
sum-=k;
}
}
return flow;
}
main(){
n=read(),m=read(),s=read(),t=read();
for(int i=1;i<=m;i++){
int u=read(),v=read();
ll w=read();
add(u,v,w);
add(v,u,0);
}
ll ans=0;
while(bfs())ans+=dfs(s,inf);
cout<<ans;
return 0;
}
最小割
\(\bf{\underline{最大流最小割定理}}\):最大流流量等于最小割容量:\(|f|=||{S,T}||\)
证明:
首先跑完最大流剩余容量为 \(0\) 的边全部割掉就是一个合法的割,若 \(s\) 和 \(t\) 仍然联通,则还可以继续增广,显然该流不是最大流,所以最小割的容量肯定不会大于最大流,否则该流一定不是最大流。即 \(|f|\le ||{S,T}||\)。
若最小割小于最大流,则跑完最小割的所有割边增广出来的流量小于最大流,那就不会有更多的流量流到汇点,所以该最大流不合法,所以 \(|f|=||{S,T}||\)。
所以直接套用最大流的算法就行了。
最小费用最大流
思路:
每次增广时增广当前费用最少的流,一直增广下去,直到找不到路径,此时得到的就是最小费用最大流。
这个是容易理解的,每次我们会增广一个固定的流量,选择一条总费用最少的路径,我们的花费就是最小的,这样我们的总花费也是最小的。
所以费用流问题就是最大流问题和最短路径问题的结合,这里介绍 dinic+SPFA 的方法,即 ZKW 费用流。
ZKW 费用流
关于spfa,它活了
为啥我们要选择 SPFA 来跑最短路,dij 它不香吗?我们在建立反向边时,其费用势必会出负数,而 dij 无法处理负边权,所以我们的 SPFA 它就活了。
将 Dinic 的 BFS 求最短路换成 SPFA 基本上就是套用 Dinic 的模板。
注意在 DFS 时该图不一定为DAG,可能在一个环上死循环,需要记一个 \(vis\) 数组,同时因为有这种 sm 情况我们不能再用当前弧优化,也就是说我们无法保证遍历边的复杂度。
说白了其实就是 EK 的一个常数优化。 ——K8He
实现:
#include <bits/stdc++.h>
using namespace std;
#define il inline
#define ll long long
il ll read(){
ll x=0,f=1;char ch=getchar();
while(ch<'0'||ch>'9'){if(ch=='-')f=-1;ch=getchar();}
while(ch>='0'&&ch<='9'){x=(x<<1)+(x<<3)+(ch^48);ch=getchar();}
return x*f;
}
const int M=5e4+10;
const int N=5e3+10;
const ll inf=1ll<<50;
struct node{
int v,nxt;
ll w,c;
}e[M<<1];
int head[N],cnt=1;
il void add(int u,int v,ll w,ll c){
e[++cnt].v=v;
e[cnt].w=w;
e[cnt].c=c;
e[cnt].nxt=head[u];
head[u]=cnt;
}
int n,m,s,t;
bool vis[N];
ll dis[N];
queue<int>q;
il bool SPFA(){
for(int i=1;i<=n;i++)vis[i]=false,dis[i]=inf;
while(!q.empty())q.pop();
dis[s]=0;
q.push(s);
vis[s]=true;
while(!q.empty()){
int x=q.front();
q.pop();
vis[x]=0;
for(int i=head[x];i;i=e[i].nxt){
int y=e[i].v;
if(!e[i].w||dis[y]<=dis[x]+e[i].c)continue;
dis[y]=dis[x]+e[i].c;
if(!vis[y]){
q.push(y);
vis[y]=1;
}
}
}
return dis[t]<inf;
}
ll dfs(int x,ll sum){
if(x==t)return sum;
ll flow=0;
vis[x]=1;
for(int i=head[x];i;i=e[i].nxt){
int y=e[i].v;
if(!vis[y]&&e[i].w>0&&(dis[y]==dis[x]+e[i].c)){
ll k=dfs(y,min(sum,e[i].w));
e[i].w-=k;
e[i^1].w+=k;
flow+=k;
sum-=k;
}
}
return flow;
}
main(){
n=read(),m=read(),s=read(),t=read();
for(int i=1;i<=m;i++){
int u=read(),v=read(),w=read(),c=read();
add(u,v,w,c);
add(v,u,0,-c);
}
ll ans=0,Ans=0;
while(SPFA()){
ll tmp=dfs(s,inf);
ans+=tmp;
Ans+=1ll*tmp*dis[t];
}
cout<<ans<<" "<<Ans;
return 0;
}