二. 图像运算、坐标变化、灰度插值
2.1 图像运算
输入两个图像A(x,y)、B(x,y),输出图像C(x,y)
2.1.1 加法运算
定义:
主要用途:
-
去除叠加性噪声:
如果某一图像被一加性随机噪声污染,那可以通过对多个该情境下的图像求平均值来降噪。
-
生成图像叠加效果。
\[C(x,y)=\frac{1}{2}\alpha(x,y)+\frac{1}{2}\beta(x,y) \\ 其中:(\alpha+\beta=1) \]
2.1.2 减法运算
定义:
主要用途:
显示两幅图像之间的变化;检测同一场景下两幅图像之间的变化。如:视频中运动目标检测、图像差异检测。
- 图像差异检测(运动目标检测)。
- 去除不需要的叠加性图案。
2.1.3 乘法运算
定义:
主要用途:
图像的局部显示。
EG:用二值模板图像与原图像做乘法运算。
2.2 坐标变化
主要介绍了图像的平移、缩放、旋转,以及计算机坐标系和常用坐标系之间的变换。
思路:通过变换矩阵,对图像进行变换:
那么:
由此,可以衍生出:尺度、旋转、平移等变换。
2.2.1 平移
变换矩阵如下:
那么变换后的坐标:
注意:变换后画布扩大的,否则会失去信息。
2.2.2 图像的尺度变换
变换矩阵如下:
变换后的坐标:
注意:由于采样间隔并没有改变,也就是说像素点的大小没有变化,那么所谓缩放其实就是像素点数量的变化,因此我们需要对多出来的像素点的灰度级进行计算,这就涉及到了插值算法,下面会讲。
2.2.3 图像的旋转变化
变换矩阵如下:
变换后的坐标如下:
公式推导:
如果原坐标\(x=P\cos{\alpha},y=P\sin{\alpha}\),假设逆时针旋转\(\alpha\)角度,那么变化后的坐标为
注意:
- 图像旋转后,会出现许多空白点(像素),对于这些空白点,必须赋予灰度值,否则图片效果会很差,这里同样用到插值算法。
- 这里的旋转适用的坐标轴是以左下角为矩阵,向右为x,向上为y的坐标轴,与openCV中矩阵坐标轴不一致,因此需要坐标轴变换。此外,还需要考虑旋转后图像的大小是否发生变化。映射的流程在空间坐标映射中体现:
2.2.4 空间坐标映射
根据顺序,存在两种映射方式:
- 前向映射:根据\((x,y)\) 推导出\((x',y')\)。
- 缺点:可能多个点映射为一个点,也可能存在一些位置没有点映射过来。
- 后向映射,由坐标值\((x',y')\)经过反向变换\(T^{-1}\)得到原先对应的坐标\((x,y)\),随后采用插值算法确定\(g(x',y')\)(即\((x',y')的灰度值\))。
二维图像的旋转映射
- 前向映射:
现在有图像Image,shape为(height,weight),其中有一点像素为P(m,n),我们将图像逆时针旋转\(\theta\)度,得到Image',shape为(height',weight'),求新的像素位置。
步骤如下:
-
我们先为坐标系命名:
- M为矩阵坐标系,左上角为坐标原点,向下为x的正方向,向右为y的正方向。M为计算机下图像的坐标系。
- N为常用数学坐标系,左下为坐标原点,向右为x的正方向,向上为y轴的正方向。N下变换矩阵生效。
-
变换坐标系:因为题目中的坐标均为M坐标系下,而我们计算像素旋转都是在N坐标系下,因此需要对像素位置进行变换。转换公式为:
\[若P_M(x,y),则: \\ P_N(x',y')= \begin{cases} x'= y \\ y'= height-x-1 \end{cases} \]因此\(P_N=P_N(n,height-m-1)\),记作\(P_N(x,y)\)
-
中心旋转:接下来就是选择相对于哪一点进行旋转,因为旋转前后图像的大小会发生变化,因此我们最好不要相对于边角进行旋转,一般选择中心进行旋转,中心坐标为\(O(\frac{weight-1}{2},\frac{height-1}{2})\),记作\(O(o_x,o_y)\)。旋转的步骤如下:
-
因为旋转公式是相对于原点的,因此将图片的中心移动到坐标原点,那么\(P_N(x,y)\)的坐标变换为:
\[\begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & -o_x \\ 0 & 1 & -o_y \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} \]得到了\(P'(x',y')\)
-
开始旋转:
\[\begin{bmatrix} x'' \\ y'' \\ 1 \end{bmatrix} = \begin{bmatrix} \cos{\theta} & -\sin{\theta} & 0 \\ \sin{\theta} & \cos{\theta} & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} \]得到旋转后的像素位置:\(P_N''(x'',y'')\)
-
将图像的中心点移动回原来的位置:
\[\begin{bmatrix} x''' \\ y''' \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & o_x' \\ 0 & 1 & o_y' \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x'' \\ y'' \\ 1 \end{bmatrix} \]注意:因为图像旋转后宽和高发生了变换,因此移动的尺度也发生了变化,现在是相对于旋转后的图像中心进行移动。
得到旋转后的像素点:\(P_N'''(x''',y''')\)
-
-
将N坐标系变换回M坐标系,变换公式如下:
\[若P_N(x,y),那么:\\ P_M(x',y')= \begin{cases} x'= height'-y-1\\ y'= x \end{cases} \]注意:因为变换后宽和高发生了变换,这里使用的是旋转后的宽和高。
得到结果\(P_M'(height'-y'''-1,x''')\)
- 后向映射:就是将上述步骤反过来,注意旋转前后图像宽和高的变化。
EG1:
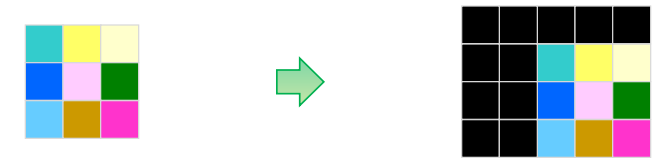
现在有图像矩阵如下:
图像大小为(4,5),像素点P(2,1),将图像旋转90°,求旋转后的像素点的坐标。
- 转化为一般直角坐标系:
\[P_N(x,y) \begin{cases} x = 1\\ y = 4-2-1=1 \end{cases} \\ P_N(x,y)=P_N(1,1) \]
相对于中心点旋转:
将中心点移动到原点:
\[\begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & -2 \\ 0 & 1 & -1.5 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} 1 \\ 1 \\ 1 \end{bmatrix} = \begin{bmatrix} -1 \\ -0.5 \\ 1 \end{bmatrix} \]将图像逆时针旋转90°:
\[\begin{bmatrix} x'' \\ y'' \\ 1 \end{bmatrix} = \begin{bmatrix} 0 & -1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} -1 \\ -0.5 \\ 1 \end{bmatrix} = \begin{bmatrix} 0.5 \\ -1 \\ 1 \end{bmatrix} \]重新将图像移动回去:这里要注意,新的图像维度为(5,4),因此移动的尺度为(1.5, 2):
\[\begin{bmatrix} x''' \\ y''' \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & 1.5 \\ 0 & 1 & 2 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} 0.5 \\ -1 \\ 1 \end{bmatrix} = \begin{bmatrix} 2 \\ 1 \\ 1 \end{bmatrix} \]得到\(P_N'''(2,1)\)
- 再将常用坐标系变换回矩阵坐标系:注意旋转后矩阵的大小发生了变化:
\[P_M(x,y)= \begin{cases} x = height'''-y-1=3 \\ y = x'''=2 \end{cases} \]因此变换后的像素位置为(3,2)。
EG2:将上述过程逆向,得到逆向映射:
- 变换为常用坐标:
\[P_N(x,y)=(2,5-1-3)=(2,1) \]
顺时针旋转90°,也就是逆时针旋转270°:
中心移动到坐标原点:
\[\begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & -1.5 \\ 0 & 1 & -2 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} 2 \\ 1 \\ 1 \end{bmatrix} = \begin{bmatrix} 0.5\\ -1 \\ 1 \end{bmatrix} \]逆时针旋转270°
\[\begin{bmatrix} x'' \\ y'' \\ 1 \end{bmatrix} = \begin{bmatrix} 0 & 1 & 0 \\ -1 & 0 & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} 0.5 \\ -1 \\ 1 \end{bmatrix} = \begin{bmatrix} -1 \\ -0.5 \\ 1 \end{bmatrix} \]中心移动回去:注意矩阵的大小发生变化
\[\begin{bmatrix} x''' \\ y''' \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & 2 \\ 0 & 1 & 1.5 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} -1 \\ -0.5 \\ 1 \end{bmatrix} = \begin{bmatrix} 1 \\ 1 \\ 1 \end{bmatrix} \]再将坐标系由常用直角坐标系变换为矩阵坐标系:
\[P_N(4-1-1, 1)=P(2,1) \]
2.3 像素灰度插值
原因:
图像中的像素只有整数坐标,坐标值\((x',y')\)经过反向映射得到的原坐标值\((x,y)\)很可能并不是整数,那么我们如何确定\(g(x',y')\)这里就需要泳道灰度插值算法。
常用的有三种办法:
-
最邻近插值算法:
-
原理:跟左上、左下、右上、右下四个像素点,哪个最近就用哪个的灰度值。
-
优点:简单,效果还行。
-
缺点:校正后图像会有明显的锯齿状,且灰度不连续。
-
-
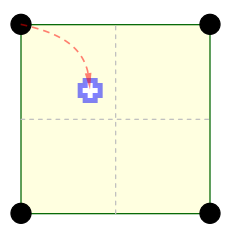
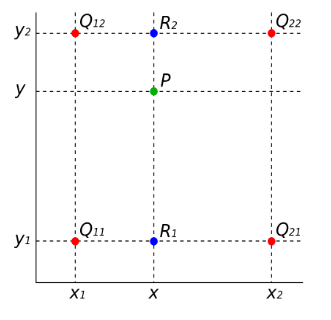
双线性插值:
-
原理:就是对像素点在x、y的方向上分别进行一次单线性插值。具体如下:
-
先在x维度上进行第一次单线性插值,得到\(R_1\) 的灰度值\(R_2\):
\[R_1 = \frac{x_2-x}{x_2-x_1}Q_{21}+\frac{x-x_1}{x_2-x_1}Q_{11} \\ R_2 = \frac{x_2-x}{x_2-x_1}Q_{22}+\frac{x-x_1}{x_2-x_1}Q_{12} \] -
再在y维度上进行一次单线性插值,得到P的灰度值:
\[P=\frac{y_2-y}{y_2-y_1}R_1+\frac{y-y_1}{R_2-R_1}R_2 \]由此可得g(p)
-
-
EG:
假设\(P'(x',y')\)经过反向映射得到的原坐标为\(P(x,y)\)为(12.8, 15.3),那么周边四个点分别为:\(N_1(12,15),N_2(12,16),N_3(13,15),N_4(13,16)\)那么:
\[R_1 = \frac{16-15.3}{16-15}N_1+\frac{15.3-15}{16-15}N_2=0.7N_1+0.3N_2 \\ R_2 = \frac{16-15.3}{16-15}N_3+\frac{15.3-15}{16-15}N_4=0.7N_3+0.3N_4 \\ \begin{align*} g(P)&=\frac{13-12.8}{13-12}R_1+\frac{12.8-12}{13-12}R_2 \\ &=0.2R_1+0.8R_2 \\ &=0.2*0.7*N_1+0.2*0.3N_2+0.8*0.7N_3+0.8*0.3N_4 \end{align*} \]简单来说:根据四个点与像素点P的距离,为不同的像素分配不同的灰度,在双线性中成对角形式。
假设像素点四个临近点依次为:左上、右上、左下、右下\(N_1,N_2,N_3,N_4\),对应坐标的绝对值差值依次为\((\Delta{x_1},\Delta{y_1}),(\Delta{x_2},\Delta{y_2}),(\Delta{x_3},\Delta{y_3}),(\Delta{x_4},\Delta{y_4})\),那么:
\[g(P) = \Delta{x_4}*\Delta{y_4}*N_1 \\ \qquad +\Delta{x_3}*\Delta{y_3}*N_2 \\ \qquad +\Delta{x_2}*\Delta{y_2}*N_3 \\ \qquad +\Delta{x_1}*\Delta{y_1}*N_4 \]
-
-
三次内插法:略