目标:定义自定义接口文件(.msg和.srv),在c++节点和Python中使用他们。
背景
有时候需要定义自己的消息和服务。之前教程都是已经定义好的系统的消息类型,本教程介绍最简单的自定义接口定义的方法。
任务
1、创建一个包
ros2 pkg create --build-type ament_cmake tutorial_interfaces
2、创建自定义消息
2.1 msg定义
创建了两个文件Num.msg以及Sphere.msg


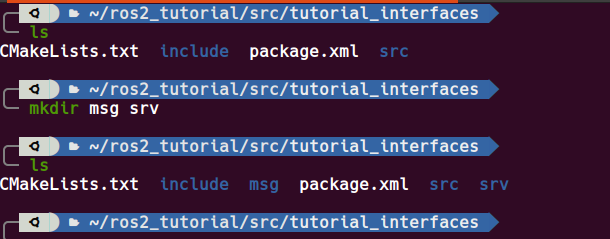
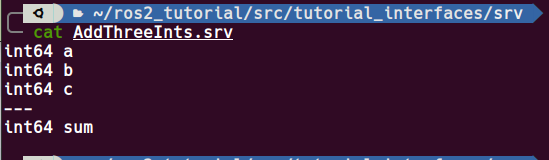
2.2 srv定义
创建文件AddThreeInts.srv
3. CMakeLists.txt
将自定义的类型转换为具体语言可识别的消息,在CMakeLists.txt中添加如下
find_package(geometry_msgs REQUIRED) find_package(rosidl_default_generators REQUIRED) rosidl_generate_interfaces(${PROJECT_NAME} "msg/Num.msg" "msg/Sphere.msg" "srv/AddThreeInts.srv" DEPENDENCIES geometry_msgs # Add packages that above messages depend on, in this case geometry_msgs for Sphere.msg )
- libraries Beginner 文件 Client msglibraries beginner文件client libraries beginner接口client libraries插件beginner client libraries beginner参数client libraries beginner client libraries beginner client空间 libraries beginner client colcon prometheus library python client prometheus library client go libraries客户端beginner客户