Linear Regression
1. 一元线性回归
定义一个一次函数如下:
其中 \(\theta\) 被称为函数的 参数。显然在坐标图上,这个函数的图像是一条直线,这也是 线性回归 中的 线性 含义所在。
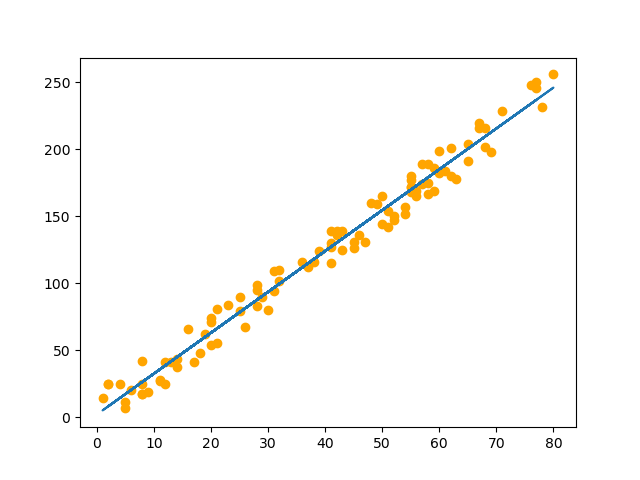
只有 一个 \(x\) 来预测 \(y\),就是用一条直线来 拟合 数据,即 一元线性回归。简单地说,一元线性回归就是 找出一条能够通过尽可能多的数据点的直线。
2. 最小二乘法求解一元线性回归
2.1 损失函数
-
残差
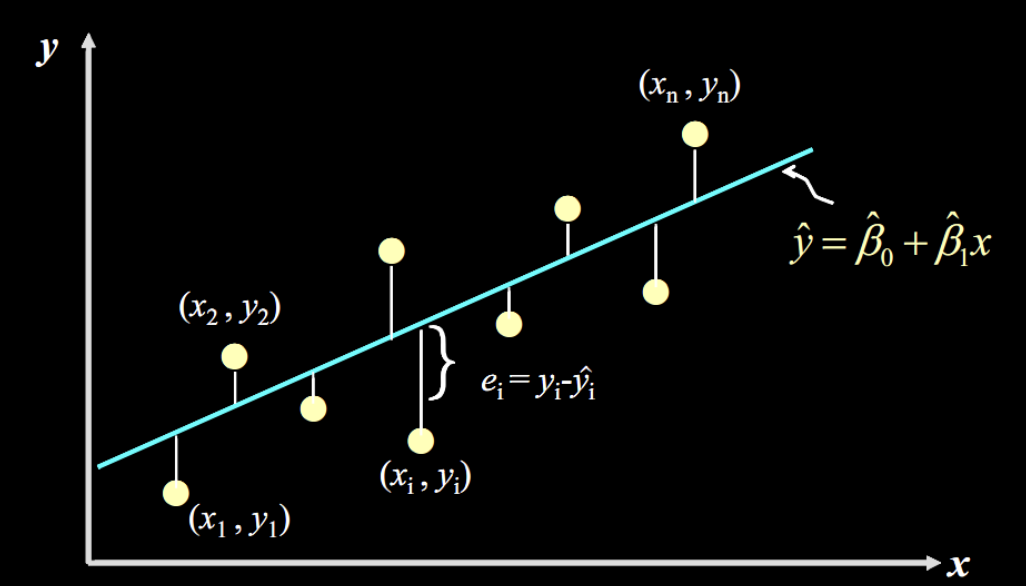
首先引入 残差 的概念,实际指的就是 真实值 与 预测值 之间的 差值,公式如下:
\[\text{e} = y - \hat y \]其中 \(y\) 表示真实值,\(\hat y\) 表示预测值。
-
损失函数
对于机器学习中的回归问题,残差平方和 是最常用的 损失函数,即 \(\text{SSE}\) (Sum of Squares for Error):
\[\hat y_i = \hat \theta_0 + \hat \theta_1 x_i \]\[\text{SSE} = \sum_{i = 1}^{n}(y_i - \hat y_i)^2 \]其中 \(\hat y_i\) 表示当前第 \(i\) 个样本数据的预测值,\(\hat \theta\) 表示当前预测值下的函数参数,\(n\) 表示样本数据的数量。
损失函数 是衡量回归模型误差的函数,函数值越小,则说明 拟合程度越高。
PS:选择残差平方和,是因为平方和可以消除负号。如果仅仅考虑差值之和,那么会出现 负数误差和正数误差抵消 的情况,此时的误差虽然接近于 \(0\),但明显是不对的;至于为什么不使用绝对值之和,主要是考虑 平方和的微分相对简单,所以一般都使用 残差平方和(\(\text{SSE}\))。
2.2 最小二乘估计
显然,要使得直线尽可能地拟合数据,需要使得 \(损失函数\) 的值尽可能 小,从而得到 最优的参数 \(\mathbf{\theta}\)。这样一个问题被称为 最优化问题。
为了方便求微分,我们通常用 \(f_{\theta}(x_i)\) 替代 \(\hat y_i\) 来表示 预测值。
为了使得偏微分的形式较为美观,可以在 残差平方和 \(\text{SSE}\) 前 乘 \(\frac{1}{2}\) 。(乘二分之一与否并不会影响参数 \(\mathbf{\theta}\) 的求解)
由以上几点,最终的损失函数 \(E\) 如下:
显然,损失函数 \(E\) 是一个 凸函数,在一般的一元线性回归问题中,损失函数的图像大致如下:
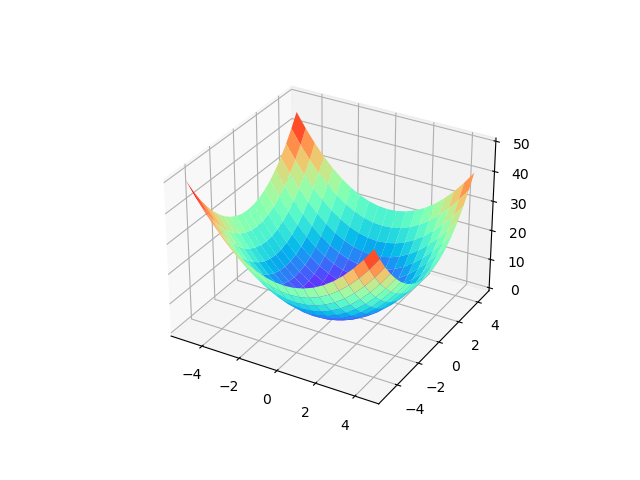
函数的最低点,也就是导数为0取到的点,此时函数值有最小值。所以,分别对 \(\theta_0\) 和 \(\theta_1\) 求偏导数,并令其为0,可以得出参数 \(\mathbf{\theta}\) 的 解析解:
联立上述等式,求解可得:
推导过程如下:
通过上述推导出的解析解可以直接确定最终的一元线性回归模型。
3. 多元线性回归
在实际生活中,需要解决的问题很多时候是 多变量 的,此时就出现了多个特征,而每个特征也都有对于的参数 \(\theta\),也就有 多元线性回归:
4. 最小二乘法求解多元线性回归
4.1 损失函数的向量化表示
令 \(\mathbf{\theta} = [\theta_0; \; \theta_1; \; \cdots \; \theta_d]\) ( \(\theta\) 是一个大小为 \(d \times 1\) 的列向量),令 \(X\) 为大小为 \(n \times d\) 的数据矩阵。\(y = [y_1; \; y_2; \cdots \; y_n]\) ( \(y\) 是一个大小为 \(n \times 1\) 的列向量,表示 真实值)。
由此可以将 损失函数向量化表示 为:
其中 \(y\) 为 真实值 , \(X\theta\) 为 预测值。
4.2 最小二乘估计(多元线性回归)
将 \(E\) 对 \(\theta\) 求偏导:
令偏导数为0,得到多元线性回归的 解析解。但是涉及 求逆 操作,所以分为以下两种情况。
- 当 \(X^TX\) 为 满秩矩阵 或 正定矩阵,则可以直接求得:
- 当 \(X^TX\) 不是 满秩矩阵,一般是 学习问题包含了多余的特征 或者 存在过多特征 以至于 \(n \le d\) 导致的。对于第一种情况一般的解决方法是 删除一些特征,对于第二章情况,可以删除一些特征,也可以使用 正则化 方法使得一定可逆(这里涉及 岭回归 的知识,暂时不拓展下去)。
通过上述推导求得 解析解 \(\theta\) 来直接确定最终的 多元线性回归模型 。
5. 线性回归(最小二乘法求解析解)核心代码
import numpy as np
from sklearn import datasets
X, y = ...
# 函数
def f(X, theta):
return np.dot(X, theta)
# 解析解
def linear_reg(X, y):
return (X.T * X).I * (X.T * y)
theta = linear_reg(X, y)
y_pred = f(X, theta)