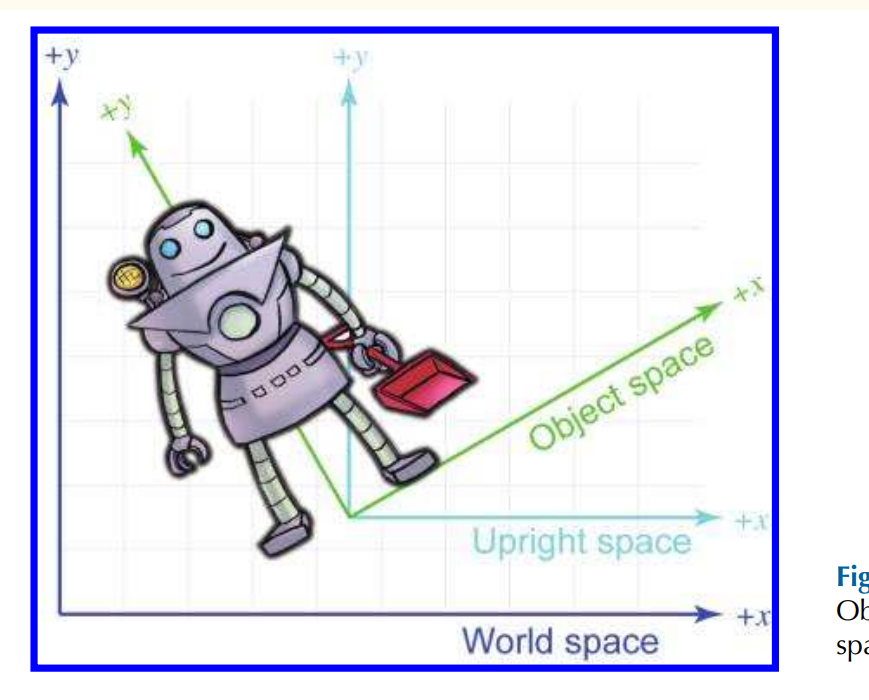
这个机器人的原点在世界坐标系下的(4.5,1.5),而她右肩膀上的那个灯的模型坐标系为(-1,5),怎样计算这个灯的世界坐标呢?
开始:
- 获取原点,这个原点为(4.5,1.5)
- 向右移动一个位置,机器人的"左边"是[0.87,0.50],这样得到的位置为(4,5,1.5) + (-1)X[0.87,0.50] = (3.63,1)
- 向上移动5个位置,机器人的"上边"为[-0.50,0.87],这样得到的位置为(4.5,1.5) + (-1)X[0.87,0.50] + 5 x [-0.50,0.87] = (1.13,5.35)
下面去掉这些数字:
b = (bx,by)为模型坐标系下的任意一个点,而W=(wx,wy)为世界坐标系下的同样一个点,我们知道机器人世界坐标系下的原点为O,他的"左边"和"上边"分别为P和q.
这样就有:
W = O + bx * p + by * q;