1、EC11手册的要点
注意:旋转的速度、RC滤波


手册中推荐的电路(已含有RC滤波):
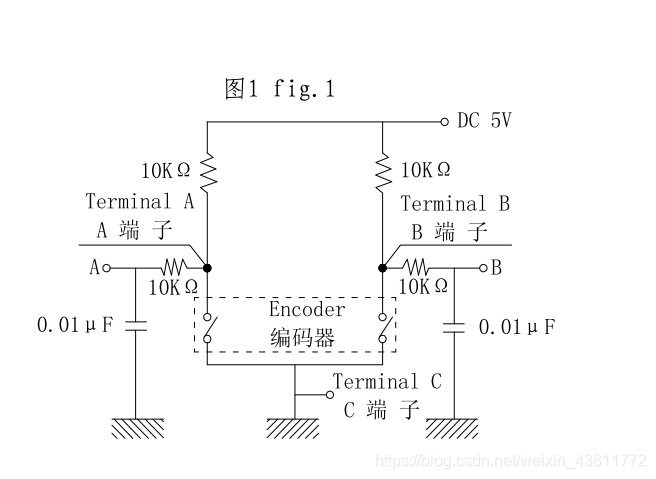
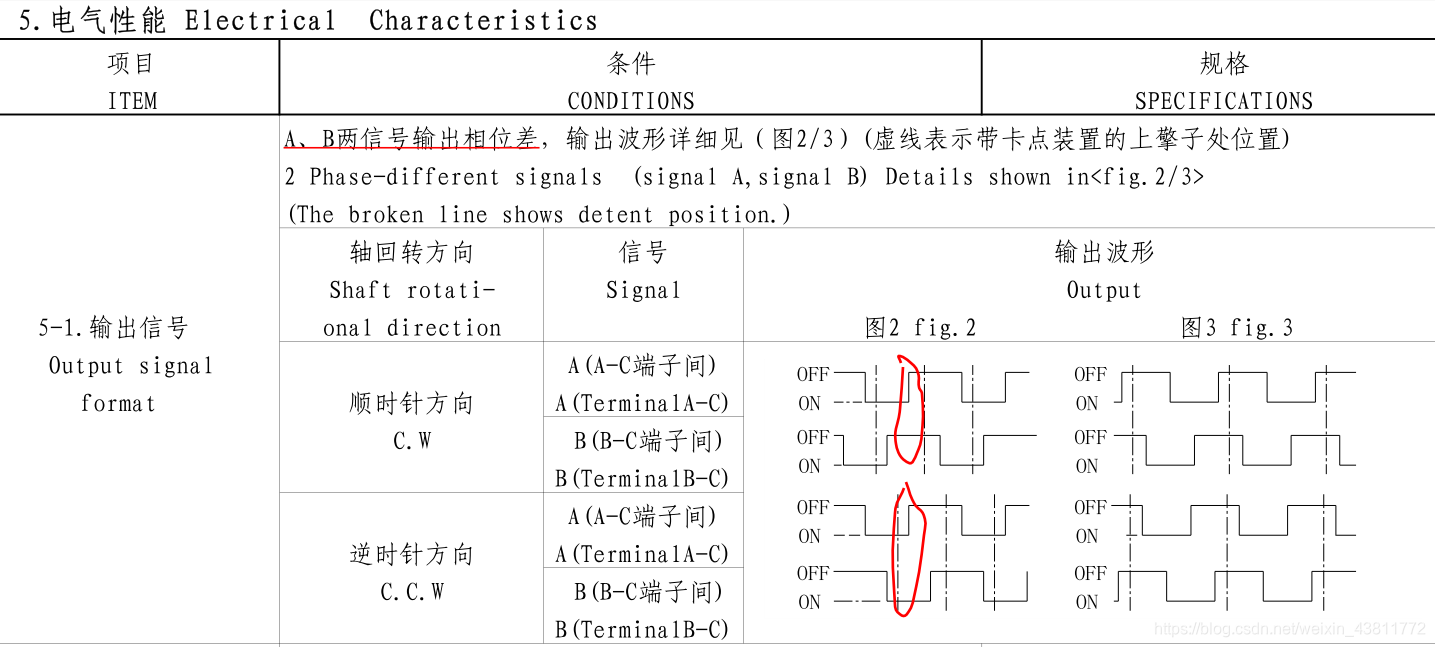
输出波形特点:
2、硬件电路
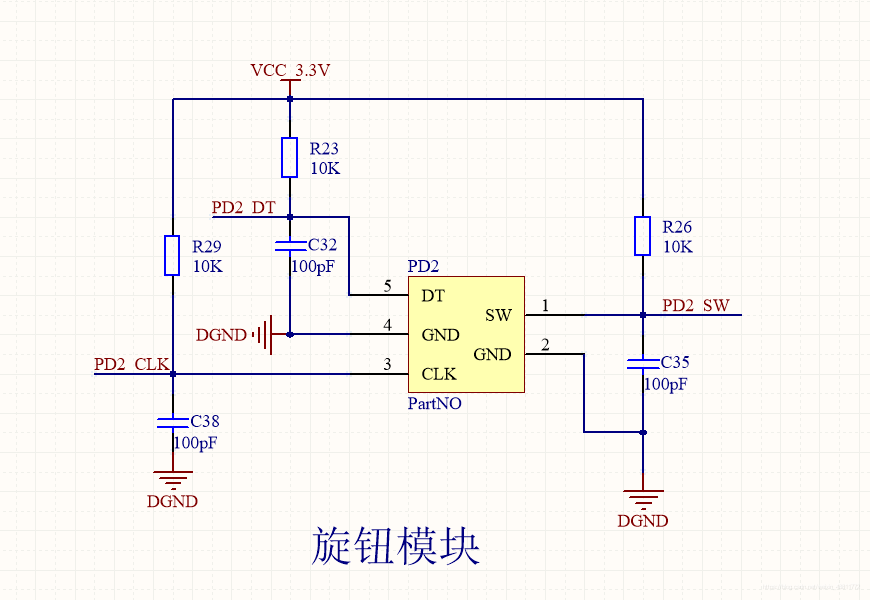
加上RC滤波电路
做法是两个端点都采用10pF电容接地,10KΩ电阻接VCC。
实测100pF电容也行。
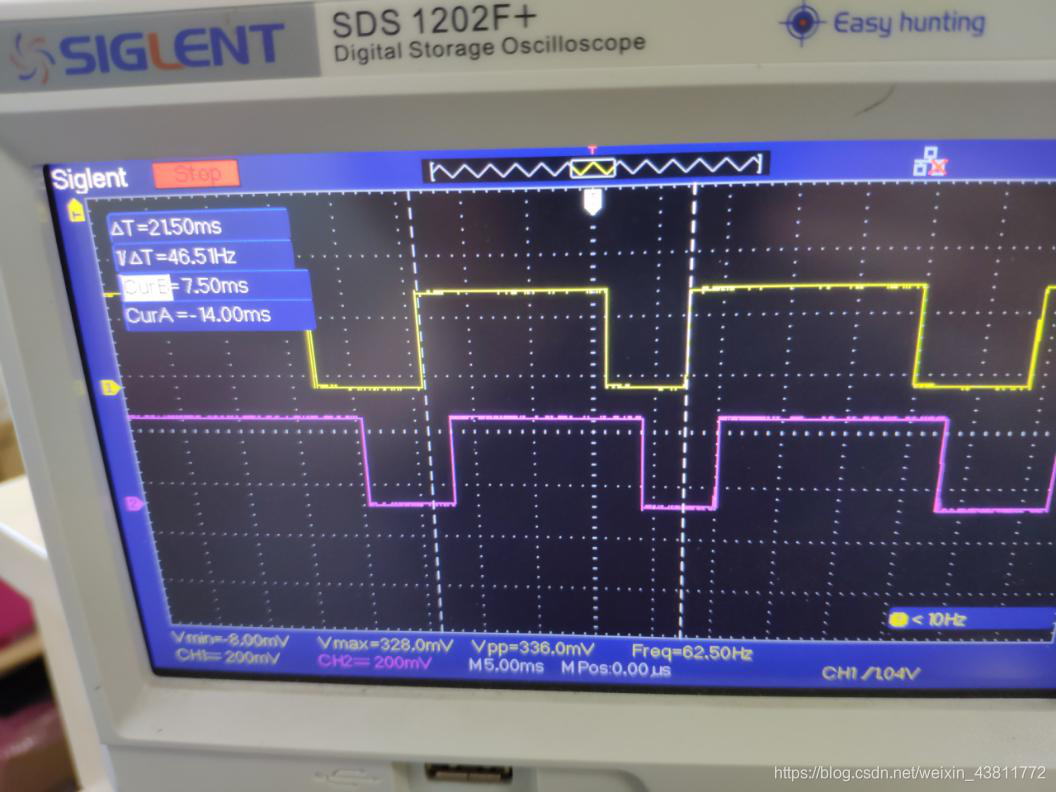
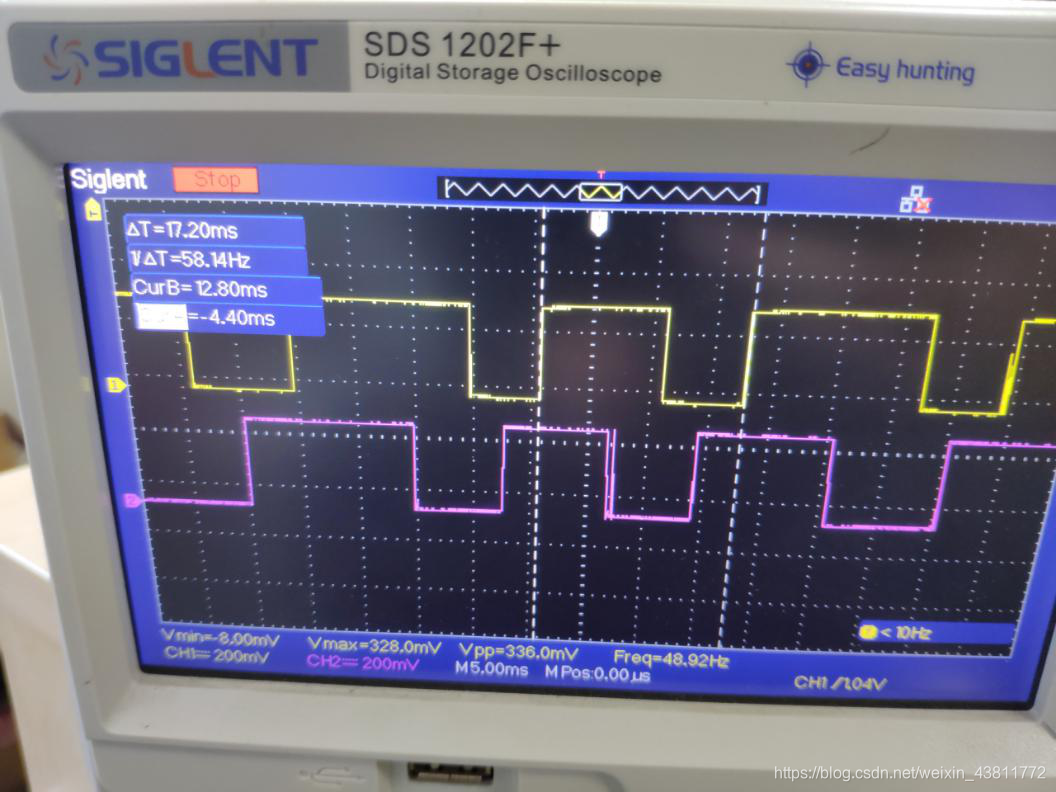
用示波器看看波形有无噪声
另外,看看不同旋转速度时的延时要求(具体见下面的中断服务函数)
顺逆时针方向的波形:
第一张图里黄色波形上升沿触发外部中断时,只有大约0-2ms的时间就会错过另一波形的准确电平。
如果中断服务函数里最前部不加延时,判断真滴是会非常不准确。。。
3、驱动程序关键点
两个端点接的IO口设置:均采用下拉输入(不接信号时是低电平,用来检测是否有高电平信号输入)
使用外部中断来检测EC11端点电平变化:
中断触发方式:上升沿触发(这也是上面IO口设置成下拉输出入的原因)
中断服务函数:触发中断的端点为高电平时,判断此时另一端点电平状态是高还是低,以此来判断旋转方向是顺时针还是 逆时针。
针对旋转速度大小,可以调节中断服务函数里的延时。
最后,旋转EC11时别手残,转就好好转,我怀疑是我滤波电容没按照手册选。。。
下面贴主要源码:
(从正点原子mini板源码基础上改的)
【knob.h】
#define knob1_clk PAin(6)
#define knob1_dt PAin(1)
【knob.c】
void knob_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //ÊäÈ룬ÏÂÀ
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
【exit.c】
//外部中断初始化函数
void EXTIX_Init(void)
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//外部中断,需要使能AFIO时钟
knob_init();//初始化按键对应io模式 A6
//GPIOA6 中断线以及中断初始化配置
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource6);
EXTI_InitStructure.EXTI_Line=EXTI_Line6;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;//上升沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn; //使能按键所在的外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02; //抢占优先级2,
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01; //子优先级1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure);
}
//中断服务函数
void EXTI9_5_IRQHandler(void)
{
delay_ms(1); //很重要******
if(knob1_clk==1)
{
if(knob1_dt == 1)
{
printf("knob: +1 \r\n");//顺时针
//delay_ms(10);
}else{
printf("knob: -1 \r\n");//逆时针
}
}
EXTI_ClearITPendingBit(EXTI_Line6); //清除LINE6上的中断标志位
}

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
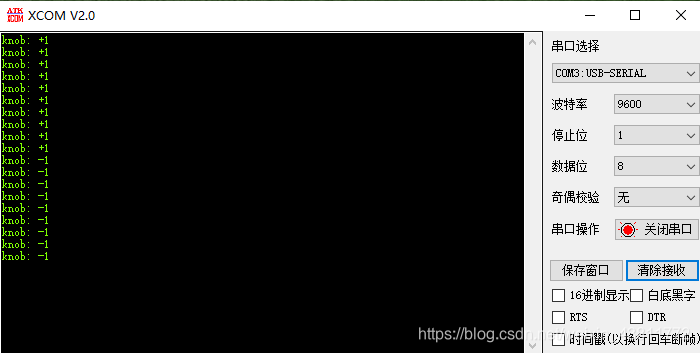
4、输出现象
先顺时针旋转,后逆时针旋转的现象:
【完】
20221222 更新:
后来入了汽车行业,发现对于开关输入监测有更成熟稳定的办法。
汽车行业的单片机开发,一般是有一个时间片轮询的自编小OS 或 freertos这种的改成时间片轮询方式运行;
在此基础上:
1个1ms执行1次的函数A监测沿变、滤波、记录电平;
1个5ms执行1次的函数B取得滤波后的电平判断出旋转方向。
【完】