6.5 Sequence kernels
考虑拓展 \(K:\cal X\times X\to\mathbb{R}\) 到 \(\cal X\) 不是向量空间的情况,例如序列、图像等等。现在令 \(\cal X\) 为字符串的集合,对应的核称为序列核 sequence kernels;一种序列核的框架,称为 rational kernels,建立在称为加权转换器 weighted transducer 的自动机上
Weighted transducers
将序列映射到数字的普适方法,可以联想到沿着序列读入并开一个自动机;对于两个输入序列亦是类似;将两个序列视作字符串,分别来自两个有限字符集合 \(\Sigma, \Delta\),并定义空字符 \(\epsilon\)(与字符串连接不变)便于匹配。定义加权转换器 weighted transducers:
Def. Weighted transducers
加权转换器 \(T\) 为一个 7 元组 \(T=(\Sigma, \Delta, Q, I, F, E, \rho)\),其中:
- \(\Sigma\) 为有限的输入字符集合
- \(\Delta\) 为有限的输出字符集合
- \(Q\) 为有限的状态集合
- \(I\sube Q\) 为初始状态集合
- \(F\sube Q\) 为接受状态集合
- \(E\) 为状态转移 \(Q\times(\Sigma\cup\{\epsilon\})\times(\Delta\cup\{\epsilon\})\times\mathbb{R}\times Q\) 的可重集,记录每一个转移的前后状态、该转移的输入、输出字符和权值
- \(\rho:F\to\mathbb{R}\) 为接收状态的权值
定义 \(T\) 的复杂度为其状态和转移的大小之和,记作 \(|T|\)
图示如下,分别用加粗、双线表示起始、接收状态,转移边用 \(\text{[input label]:[output label]/[weight]}\) 标识;接收状态用 \(\text{[state]/[weight]}\) 标识
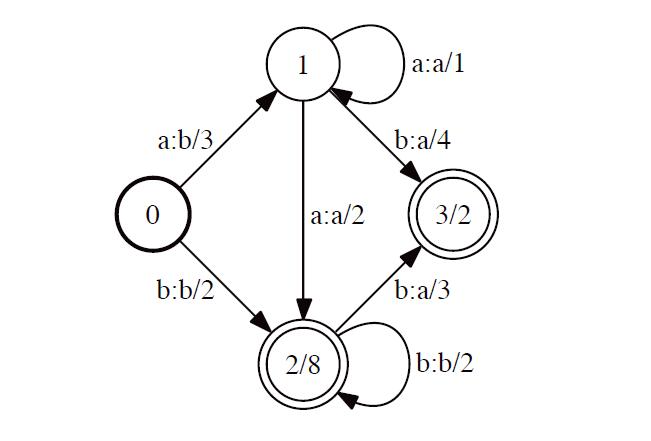
对于一个加权转换器 \(T\) 的一条从起始状态到接收状态的路径 \(\pi\)(称为 accepting path),其输入 \(\text{input} _\pi\) 为沿途转移的输入字符的顺次连接、输出 \(\text{output} _\pi\) 为沿途转移的输出字符的顺次连接、权值 \(\text{value} _\pi\) 为沿途转移的权值的乘积再乘以接收状态的权值;
定义一个加权转换器 \(T\) 对应的映射 \(T:\Sigma ^ * \times \Delta ^ *\to\mathbb{R}\):对于 \((x,y)\in\Sigma ^ * \times\Delta ^ *\),\(T(x,y)\) 为所有从起始状态到接收状态的路径、满足其输入为 \(x\) 且输出为 \(y\)、的权值之和,即
先考虑一个小细节:如果在某点存在 \((\epsilon:\epsilon/a),a\ne 0\) 的自环会如何呢?显然,任何经过该点的路径,都能在该自环上走任意次,且路径的输入输出不变;由于定义是对路径求和,因此有无穷多条满足 \((x,y)\) 的路径,从而 \(T(x,y)\) 无限大;因此通常我们令 \(\epsilon\) 自环的权值为 \(0\)
对于除自环外无环的 DAG,可以 \(O(|T|)\) 直接计算,后面会提供一种方法
Composition
Def. Composition 组合运算
两个加权转换器 \(T _1=(\Sigma, \Delta, Q _1, I _1, F _1, E _1, \rho _1), T _2 = (\Delta, \Omega, Q _2, I _2, F _2, E _2, \rho _2)\) 的 composition 组合运算,记为 \(T _1\circ T _2\),为
我们有 \(O(|T _1||T _2|)\) 的算法构造一个新的 \(T _1\circ T _2\),其实就是令 \(Q _1\times Q _2\) 为新的状态集合,并将转换 \((q _1, a,b,w _1, q _2)\in E _1,(q' _1,b,c,w _2,q' _2)\in E _2\) 合并成 \(((q _1, q' _1),a,c,w _1\cdot w _2,(q _2, q' _2))\) 加入 \(E\)
不过值得注意的是,如下图所示,这种方法构造出的转换器对于 \(z\) 用 \(\epsilon\) 匹配两边的情况,可能会存在多条 accepting path(因为 \(\epsilon\) 可以拆成任意个进行匹配,也就可能存在多种匹配方式,当然,\(\epsilon:\epsilon\) 权值都得是 \(0\),才能保证这些路径的权值有界且都相同,这样的话其实后面讨论的多条路径,权值都是零,也无所谓几条了吧),但是由定义只有一个 \(z\),会重复计算;
为了使得 \(\epsilon\) 路径只有一条,我们需要更具体的刻画。先考虑每一条路径,其上每一组匹配,都形如 \((a:x:x:y),(a:\epsilon:\epsilon:y),(a:\epsilon:\epsilon:\epsilon),(\epsilon:\epsilon:\epsilon:y)\) 四者之一,我们用将其重写为 \((a:x:x:y),(a:\epsilon 2:\epsilon 1:y),(a:\epsilon 2:\epsilon 2:\epsilon),(\epsilon:\epsilon 1:\epsilon 1:y)\),也就是将 \(T _1\) 改造成 \(\widetilde{T} _1\),使其均形如 \((x:\epsilon 2),(\epsilon:\epsilon 1)\);对 \(T _2\) 改造成 \(\widetilde{T} _2\) 同理;
现在我们可以制造一个充当 filter 的转换器 \(F\),插在 \(\widetilde{T} _1\circ F\circ\widetilde{T} _2\) 里,去掉一些多余的匹配;匹配的中间部分都形如 \((x:x),(\epsilon 2:\epsilon 1),(\epsilon 2:\epsilon 2),(\epsilon 1:\epsilon 1)\),这些就是 \(F\) 的转移边
现在观察多出来的 \(\epsilon\) 路径是怎么来的,并且去重;对于该路径相邻两个 \((x:x)\) 之间的部分,如果同时存在 \((\epsilon 1:\epsilon 1),(\epsilon 2:\epsilon 2)\),那么显然存在另一条更短的路径为 \((\epsilon 2:\epsilon 1)\),我们总是取更短的;因此要么只有 \(\{(\epsilon 1:\epsilon 1),(\epsilon 2:\epsilon 1)\}\),要么只有 \(\{(\epsilon 2:\epsilon 2),(\epsilon 2:\epsilon 1)\}\);以 \(\{(\epsilon 1:\epsilon 1),(\epsilon 2:\epsilon 1)\}\) 为例,如果存在相邻两组为 \((\epsilon 1:\epsilon 1),(\epsilon 2:\epsilon 1)\),那肯定存在另一条路径在这里为 \((\epsilon 2:\epsilon 1),(\epsilon 1:\epsilon 1)\),我们取后者就行了;因此构造出 \(F\) 如图:
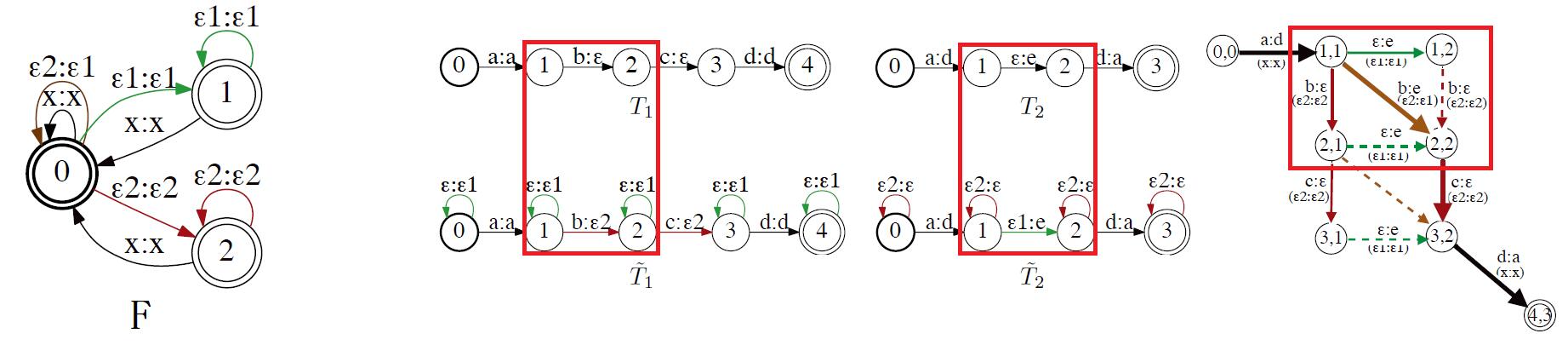
综上,求出 \(\widetilde{T} _1\circ F\circ\widetilde{T} _2\) 即可;这样的复杂度依然是 \(O(|T _1||T _2|)\),因为 \(|F|\) 是固定的常数
Computation
接下来考虑计算 \(T(x,y)\) 的算法
首先我们假设 \(T\) 没有非零权值的 \(\epsilon:\epsilon\) 环,否则任何经过该环的权值都会变得无穷大;接下来,为 \(x\) 构造一个只有一条 accepting path、且其输入输出都为 \(x\)、其权值为 \(1\) 的转换器 \(T _x\),显然它就是一条链,复杂度 \(O(|x|)\);同理构造 \(T _y\)。
然后求出 \(U=T _x\circ T\circ T _y\),复杂度为 \(O(|T||T _x||T _y|)\)。我们会发现,此时 \(U\) 是一个有向无环图,这是因为对于 \(T _x\circ T\) 的任何两个状态 \((q _1, q' _1),(q _2, q' _2)\),状态的第一维关键字继承了原本 DAG 的偏序关系,因此 \(T _x\circ T\) 是 DAG,同理 \(U=T _x\circ T \circ T _y\) 也是 DAG
此时观察 \(U\) 的所有 accepting path,显然它们的输入都是 \(x\)、输出都是 \(y\),因此只需要用 \(O(|U|)\) 计算做一次拓扑遍历求出所有 accepting path 的权值和,就是我们想要的 \(T(x,y)\)
由于 \(|T|\) 是一个不变的常数,因此计算 \(T(x,y)\) 的时空复杂度为 \(O(|x||y|)\)
Rational kernels
Def. Rational kernels
称映射 \(K:\Sigma ^ * \times \Sigma ^ * \to \mathbb{R}\) 为 rational kernel,若存在某个加权转换器 \(T\),使得 \(K(x,y)=T(x,y)\),也可以直接写成 \(K=T\)
Th. PDS rational kernels
定义加权转换器 \(T\) 的逆 \(T ^ {-1}\),为将 \(T\) 的每一个转换的输入输出对调,从而有 \(T(x,y)=T ^{-1}(y,x)\)
则对于任意加权转换器 \(T\),映射 \(K=T\circ T ^{-1}\) 是 PDS 核
有了这个保证,我们就能使用对 PDS 封闭的运算创造更多的序列核了
证明:
定义核序列 \((K _n) _{n\ge 0}\),使得 \(K _n(x,y)=\sum _{|z|\le n}T(x, z) T ^{-1}(z,y)=\sum _{|z|\le n}T(x, z) T(y,z)\)
对于样本 \((x _1,\dotsb, x _m)\),\(K _n\) 对应的核矩阵\[\begin{aligned}{\bf K} _n &= [K _n(x _i, x _j)] _{(i,j)}=\begin{bmatrix}\Sigma _{|z|\le n}T(x _i, z)T(x _j,z)\end{bmatrix} _{(i,j)} \\ &= {\bf AA ^\top}\qquad; {\bf A}= \begin{bmatrix}T(x _i,z _j)\end{bmatrix} _{i\in[m],j\in[N]}\end{aligned} \]从而 \({\bf c ^\top K} _n{\bf c=c ^\top AA ^\top c}\ge 0\),\(K _n\) 为 PDS,序列极限 \(K\) 亦为 PDS
Counting transducers
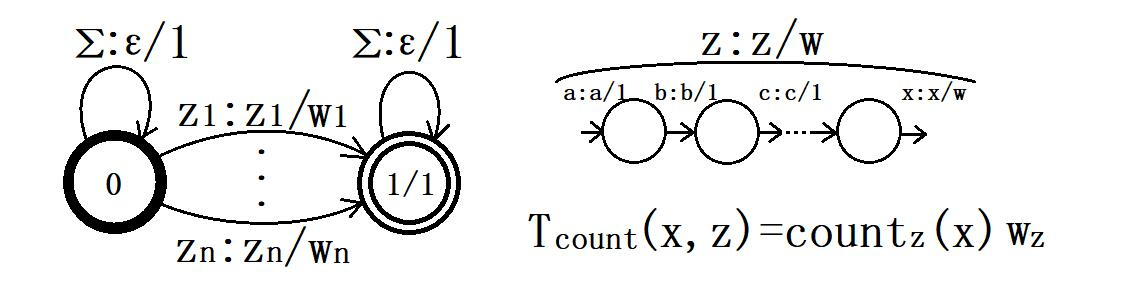
一个 rational kernel 的应用,是构造计算 \((x,y)\) 同时具有某些相同模式的转换器;形式化地说,定义能被某个自动机识别的模式集合 \({\cal X}\)(可被正则表达式写出,比如 \(\Sigma ^ * (\Sigma+\epsilon) ^ * \Sigma ^ *\) 这种),记模式 \(z\in\cal X\) 在字符串 \(x\) 出现次数为 \(\text{count} _z(x)\),则存在加权转换器 \(U\),使得 \(U(x,y)=\sum _{z\in\cal X}\text{count} _z(x)\text{count} _z(y)w _z ^2\),其中 \(w _z\) 为任意设定的权值
它的设计方式很简单,我们先构建如下的转换器 \(T _\text{count}\),使得它只接受 \(\cal X\) 里的模式 \(z _1,\dotsb, z _n\),则有
现在取 \(U=T _\text{count}\circ T ^ {-1} _\text{count}\),有:
6.6 Approximate kernel feature maps
使用核方法做 SVM,求对偶问题需要 \(O(m ^2 C _K)\) 的时间复杂度,其中 \(C _K\) 是计算一次核函数的复杂度
求出问题后,做估计有两种方法,一种是 \(h(x)=\sum _{i=1} ^m\alpha _i K(x _i, x) +b\),复杂度为 \(O(mC _K)\);另一种方法是 \(h(x)={\bf w}\cdot\Phi(x)+b\),复杂度为 \(O(\dim(\mathbb{H}))\),后者不一定比前者优,但是我们可以用一种方法估计 \(\Psi\approx\Phi\),即 \(\Psi(x)\cdot\Phi(y)\approx K(x,y)\),使得前者的维度固定为某个 \(D\)
先给出定理:
Th. Bochner's theorem
局部紧集 \(\cal X\) 上的连续核 \(K(x,y)\),若具有 “平移不变性”(称为平移不变核 shift-invariant kernel),即 \(K(x,y)=G(x-y)=G(y-x)\),则 \(G\) 为正定函数(即 \(K\) 是 PDS 核),当且仅当 \(G\) 能傅里叶变换到一个 \(\cal X\) 上的非负度量 \(p\),即:
书上没有证明,按我的想法说明看看:
这个定理也就是说,\(G\) 的傅里叶变换 \(p(\omega)\ge 0\)
首先给出一个结论:实数域的正定可以等价推广到复数域,也就是说,假设 \(\bf K\) 使得 \(\forall {\bf c}\in\mathbb{R} ^{m\times 1},{\bf c ^\top Kc}\ge 0\),等价于 \(\forall {\bf c}\in\mathbb{C} ^{m\times 1},{\bf c} ^ H {\bf Kc}\ge 0\),其中 \({\bf c} ^ H\) 表示 \(\bf c\) 的共轭转置
它的证明很简单,若实数域成立,则 \({\bf c} ^ H {\bf Kc}=\sum _{j,k}\bar{c _j}c _k K _{jk}=\sum _{j,k}(x _j-iy _j)(x _k + iy _k)K _{jk}={\bf x ^\top K x + y ^\top K y} + i\cdot\sum _{j,k}(x _j y _k - x _k y _j) K _{jk}={\bf x ^\top K x + y ^\top K y}\ge 0\);反过来显然成立,故两者等价
现在我们简单说明 \(K\) 满足复数域上的正定对称,等价于 \(G\) 的傅里叶变换非负
后推前,由 \(G(x)=\int p(\omega)e ^{i\omega x}{\rm d}\omega\),可以证明每个 \(g(x)=e ^{i\omega x}\) 都是正定函数,这是因为 \(g(x)\) 的核矩阵 \({\bf K}=[e ^{i\omega (x _i-x _j)}] _{(i,j)}={\boldsymbol{\beta \beta}} ^H,{\boldsymbol{\beta}}=[e ^{i\omega x _i}] _{i}\),于是 \(G(x)\) 作为它们的正加权和也是正定函数
前推后,固定 \(\omega\),由 \(p(\omega)=\int G(x)e ^{-i\omega x}{\rm d}x=\int _x G(x-y _0)e ^{-i\omega (x -y _0)}{\rm d}(x - y _0)=f(y _0),\forall y _0\in\cal X\),则 \(p(\omega)=f(y _0)\cdot 1 = f(y _0)\int _y{\rm d}y = \int _y f(y){\rm d}y=\int _y\int _x G(x-y)e ^{-i\omega (x-y)}{\rm d}x{\rm d} y\),它的离散形式为 \(\sum _{i,j} G(x _i- x _j)e ^{-i\omega(x _i- x _j)}={\boldsymbol{\beta}} ^H{\bf K}{\boldsymbol{\beta}}\ge 0,{\boldsymbol{\beta}}\) 同上;所以粗糙地就有 \(p(\omega)\ge 0\) 啦
若 \(G(0)=\int p(\omega){\rm d}\omega=1\),则 \(p\) 可以视作一个分布,此时可以通过采样进行估计
具体而言,由于 \(K,p\) 都是实函数,取实部分析:
这就是估计方法
它具有概率上界,不过...先不写了