参数
参数概念
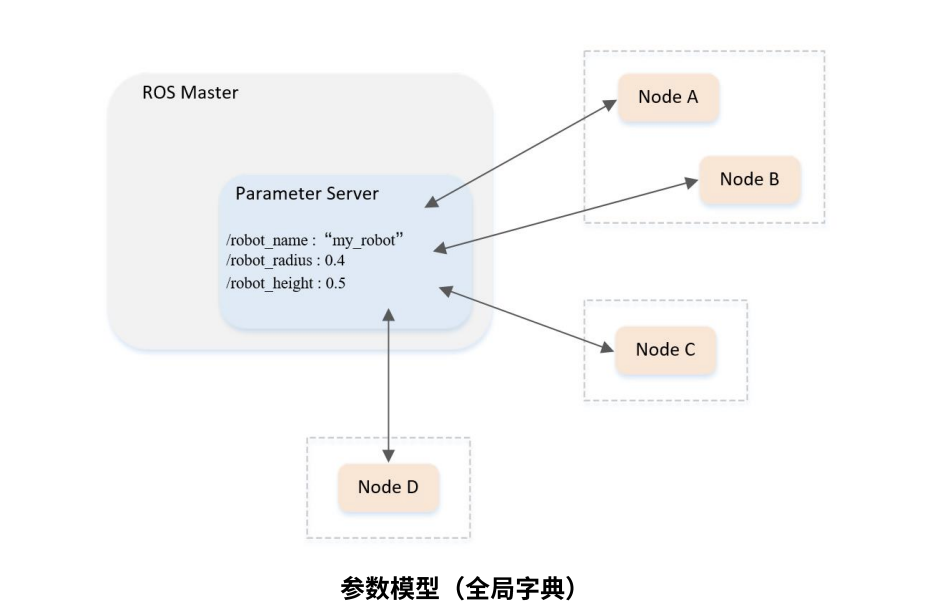
在ROS Master中,存在一个参数服务器(Parameter Server),它是一个全局字典,即一个全局变量的存储空间,用来保存各个节点的配置参数。各个节点都可以对参数进行全局访问。
创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_parameter roscpp rospy std_srvs
参数命令行的使用(rosparam)
rosparam命令可以完成参数相关的大部分功能
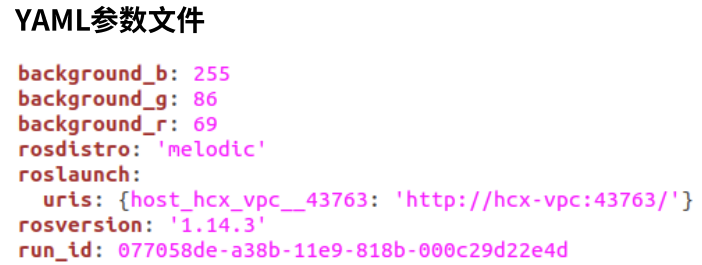
在ROS中,参数文件常以YAML文件的格式保存
常用rosparam命令用法
- 列出当前的参数
rosparam list - 显示某个参数值
rosparam get param_key - 设置某个参数值
rosparam set param_key param_value - 保存参数到文件
rosparam dump file_name - 从文件读取参数
rosparam load file_name - 删除参数
rosparam delete param_key