2开关和传感器
了解人类的功能有助于理解自动化。人类仅有大脑是不够的。还需要视觉、听觉、触觉和嗅觉来提供环境信息,供大脑处理。同样,开关和传感器也能提供环境信息,供控制器处理。处理的结果决定了执行器将执行的操作,这将在下一章讨论。本章专门讨论开关和传感器,以便我们深入讨论执行器。就像视觉、听觉、触觉和嗅觉对人类功能的重要性一样,开关和传感器也是工业流程自动化所需的重要组件。
在本章中,我们将介绍以下主要内容:
- 开关和传感器
- 手动操作开关
- 机械操作开关
- 传感器(电容式、电感式和光电式)
2.1 介绍开关和传感器
开关是一种电气元件,用于连接或断开电路中的信号路径。它用于接通或断开电路。开关有两种状态:接通状态和断开状态。在电路中,当开关处于接通状态时,电流将流动。处于关断状态时,电流不会流动。因此,接通状态将连接信号通路,而断开状态将断开信号通路。开关可以指用于打开或关闭设备的装置。
开关可分为以下几类:
- 手动开关
- 机械操作开关
传感器是用于检测或感知物体存在或不存在的装置。传感器可视为自动开关。它们从环境中收集信息,并将其转换成一种信号形式,供观察者或设备读取和/或查看。人类的眼睛、鼻子、耳朵、舌头和皮肤都可以被称为传感器。眼睛可以探测光能,鼻子可以探测化学物质或各种气味,耳朵可以探测声音,皮肤可以探测温度或压力。同样,在自动化系统中,各种类型的传感器可以检测到各种物理量,如光、声音、温度等。这些物理量将被转换成数字或模拟信号,供观察者或设备(控制器)读取和/或查看。
在本节中,我们了解了开关,并将其概括为用于打开或关闭设备的装置。我们还了解到,传感器可视为自动开关。它们不是由人操作的。对开关和传感器有了一定的了解,就能更好地理解下一节将讲解的开关类型。它还将帮助你理解本章稍后将讲解的接近传感器。
2.2 手动操作开关
在制造过程中,总是需要操作员启动或停止机器,除了启动和停止之外,还可能需要手动执行其他形式的控制。这些通常需要可以手动操作的开关。手动操作的开关被称为手动操作开关。以下是一些例子:
- 按钮
- 摇臂开关
- 拨动开关
- 选择开关
- 刀开关
2.2.1 按钮
按钮是一种开关,当按下或按下按钮时,电路闭合或断开。按钮有两种工作状态(即开或关)。处于接通位置时,内部金属弹簧接触开关的两个端子,允许电流流动。当处于关断位置时,内部开关缩回,电流停止流动。
按钮有常开和常闭两种,可用于控制单个电路。
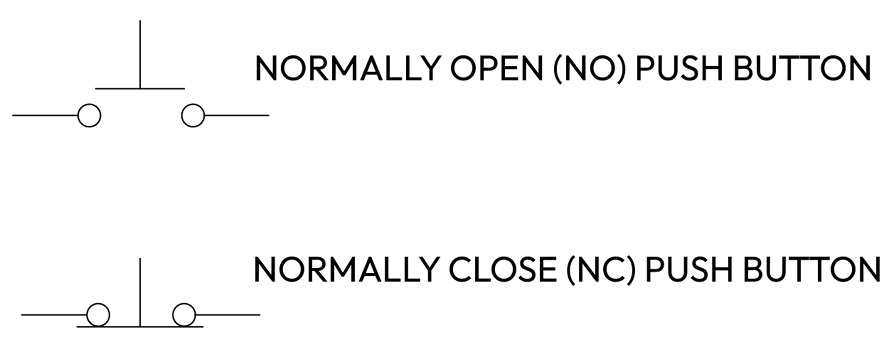
在常开按钮中,当按钮未按下时,触点打开,连接断开(即开关处于断开状态)。按下按钮时,触点闭合,连接建立(即开关接通)。
在常闭按钮中,当按钮未按下时,触点闭合,连接建立(即开关接通)。按下按钮时,触点打开,连接断开(即开关断开)。
下图显示了常开 (NO) 和常闭 (NC) 按钮的符号:
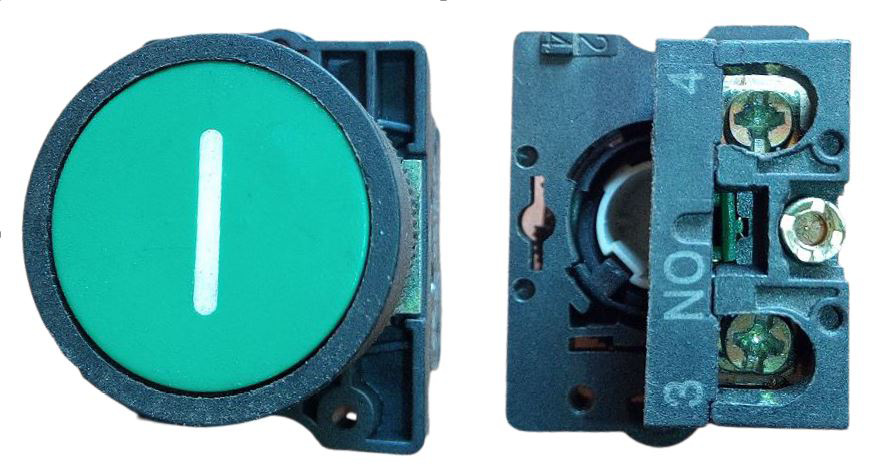
下图显示了常开按钮的正面和背面。端子3和端子4用于将开关连接到电路中:
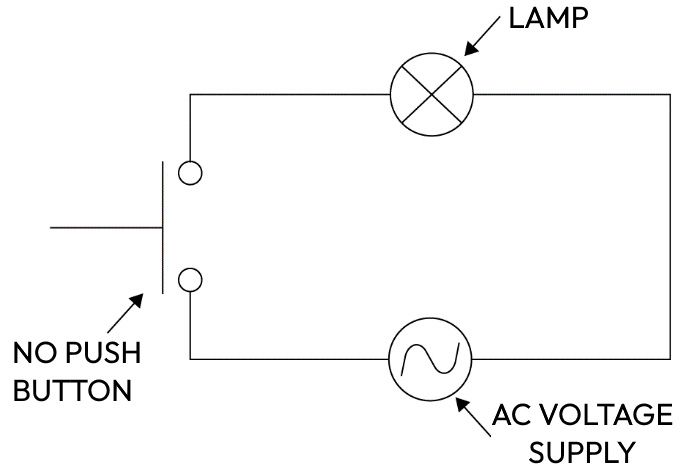
下面的接线图显示了如何使用常开按钮点亮灯泡。按下按钮时,灯亮;松开或按下按钮时,灯熄灭:
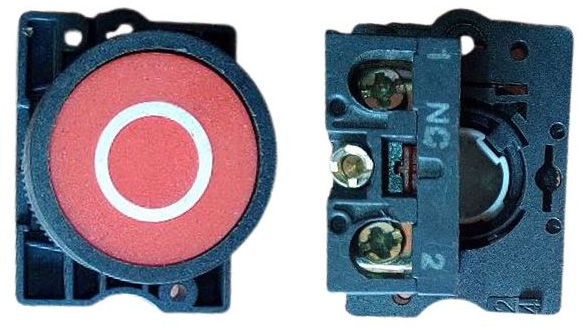
下图显示了NC按钮的正面和背面。端子1和端子2用于将开关连接到电路中:
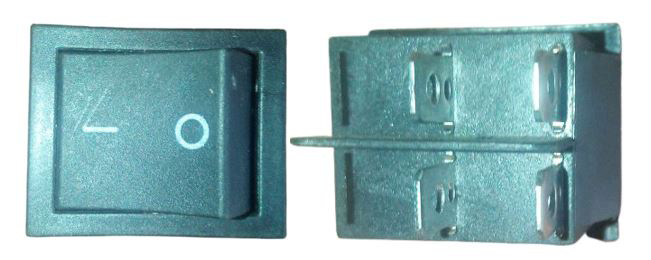
2.2.2 摇臂开关
摇臂开关是按下时一侧抬起,另一侧压下。
翘板开关有多种形式:
- SPST
- SPDT
- DPST
- DPDT
单刀单掷开关(SPST Single Pole Single Throw)只能开关(接通或断开)一个电路。它是最简单的开关形式,因为它只有一个输入端,只能连接一个输出端。

下图是SPST开关点亮灯泡的简单接线图:

单刀双掷 (SPDT Single Pole Double Throw) 开关是一种只有一个输入端(通常称为公共端)的开关,可以连接并切换两个不同的输出端。输入端通常默认连接一个触点,称为常闭触点。另一个触点在运行期间连接到输入端,称为常开触点。
下图显示了 SPDT 开关的符号:

下图是单刀双掷开关用于点亮两盏灯(一次一盏)的简单接线图:

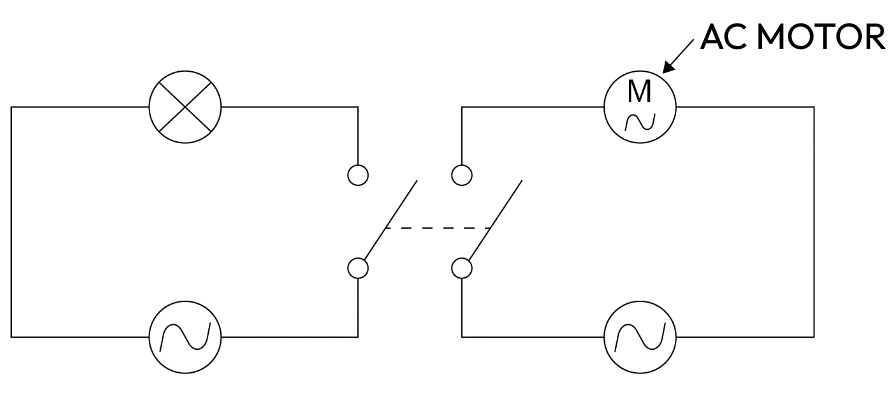
双刀单掷 (DPST Double Pole, Single Throw) 开关是一种有两个输入端(通常称为公共端)的开关,每个输入端可以连接和切换一个相应的输出端。它由两个同时工作的 SPST 开关组成。
下图显示了 DPST 开关的符号:

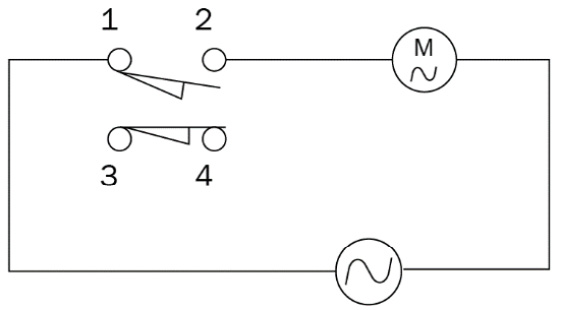
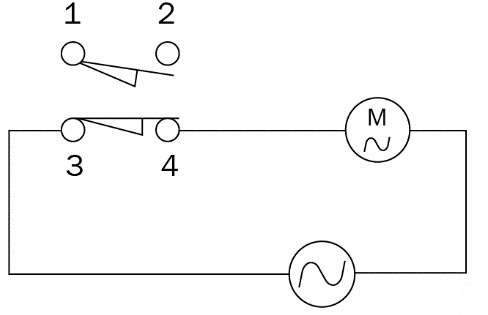
下图是一个 DPST 开关的简单接线图,用于同时接通或断开一盏灯和一台感应电机:
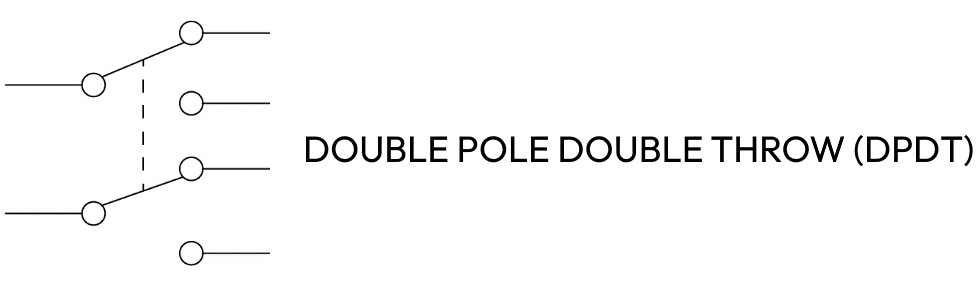
双刀双掷 (DPDT Double Pole Double Throw) 开关是一种有两个输入端(通常称为公共端)的开关,每个输入端可以连接和切换两个相应的输出端。它由一个封装上同时工作的两个 SPDP 开关组成。
下图显示了 DPDT 开关的符号:
下面的接线图显示了使用 DPDT 开关使直流电机正反转的情况:

接下来,让我们看看拨动开关。
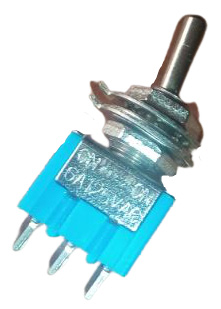
2.2.3 拨动开关
拨动开关是一种由杠杆组成的开关,通过来回移动杠杆来打开或关闭电路。它们可以有多个杠杆位置。
拨动开关也分为 SPST、SPDP、DPST 和 DPDT 开关。下图显示了拨动开关的外观:
2.2.4 滑动开关
滑动开关使用滑动动作产生与拨动开关相同的连接。滑动开关也可以是 SPST、SPDP、DPST 或 DPDT 开关。下图显示了滑动开关的外观:

2.2.5 选择开关
选择开关可能有两个或多个选择位置。它可以通过旋转手柄控制不同电路的接通或断开状态。它用于需要多个控制选项的场合。
下图显示了选择开关的旋转手柄及其连接端子:

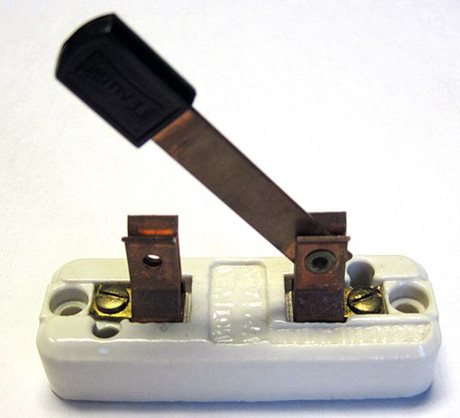
2.2.6 刀开关
刀开关是一种使电流产生、断开或改变电流方向的开关设备。它由一个或多个可移动的铜片组成,这些铜片是铰链式的,通过在它们之间施加压力与固定的叉形触爪接触。
2.3 机械操作开关
机械操作开关由压力、位置或温度等因素自动控制。这与手动操作开关不同,手动操作开关由手或人工操作。它们用于需要自动控制的场合。开关通过开关中的机械装置根据压力、温度或位置自动操作。它们也可称为传感器。
机械操作开关取代了人工操作。这类开关的一些示例如下:
- 限位开关(Limit switch)
- 液位开关(Level switch)
- 压力开关(Pressure switch)
- 温度开关(Temperature switch)
让我们分别来看看。
2.3.1 限位开关
这是一种通过机器部件的运动来操作的开关。当达到预定限值时,它就会动作。标准限位开关是一种机械装置,利用物理接触来检测物体的存在与否。它由开关本体、致动器和操作头组成。
下图显示了限位开关及其部件:
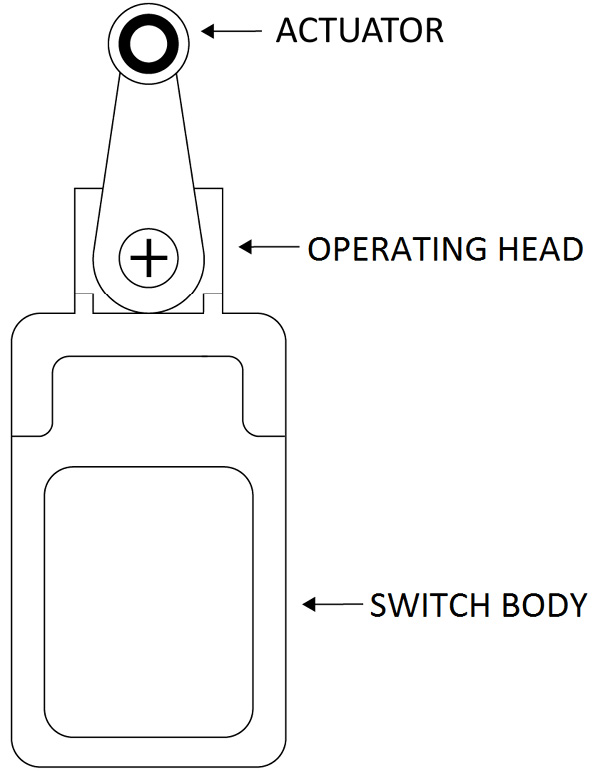
开关本体包含电气触点。致动器是限位开关中与目标接触的部分,它的移动导致电气触点的连接或断开。操作头是发生旋转的地方,由连接或断开电气触点的机构组成。
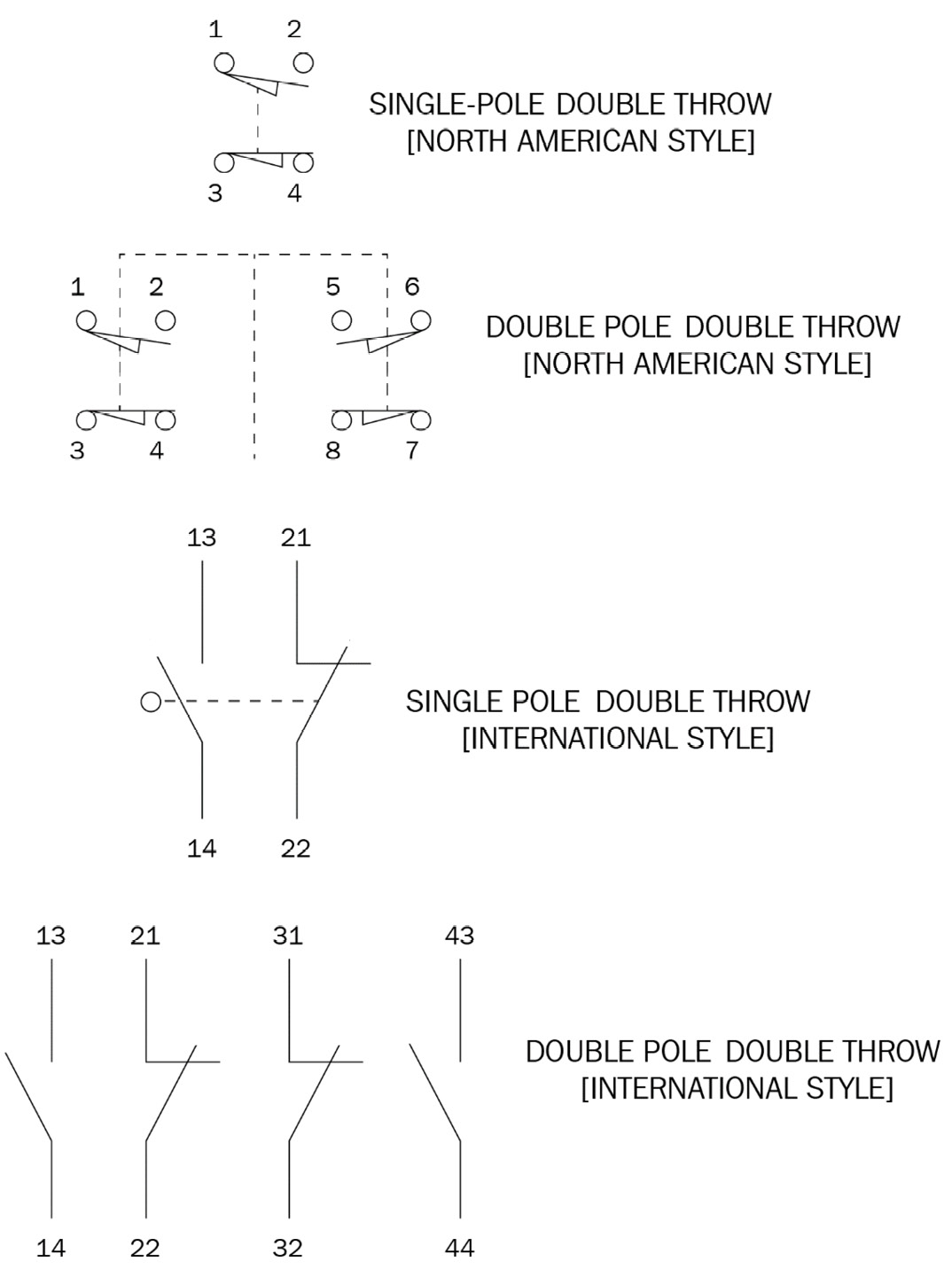
限位开关有两种基本电触点配置 - 单刀双掷 (SPDT) 和双刀双掷 (DPDT)。SPDT 包括一个常开触点和一个常闭触点,而 DPDT 包括两个常开触点和两个常闭触点。
限位开关可以使用的一种执行器类型是瞬时操作。使用这种类型的致动器时,当没有施加力时,设备处于自由位置,触点处于正常状态。
当施加外力时,设备将处于工作位置 - 在这种情况下,电气触点将从正常状态变为工作状态。卸力时,设备将回到自由位置,电气触点将恢复正常状态。

另一种执行器是保持操作型。在这种类型的执行器中,当执行器不再与目标物接触时,执行器杠杆和电气触点仍保持工作状态。当向相反方向施加力时,执行器杠杆和电气触点会恢复到自由位置。
在上图中,电路中使用了限位开关的端子1和端子2。由于端子1和端子2处于打开状态,因此在未达到限位时电机不会运行。当达到限位时,打开的端子(1和2)将闭合,电机开始运行。
在上图中,电路中使用了限位开关的端子3和端子4。由于端子3和端子4处于闭合(即连接)状态,因此在未达到限值时电机将运行。当达到限位时,闭合的端子(3和4将打开,电机将停止运行。
下图所示为将前盖拧在外壳上的限位开关:

下图显示的是卸下前盖的限位开关:

2.3.2 液位开关
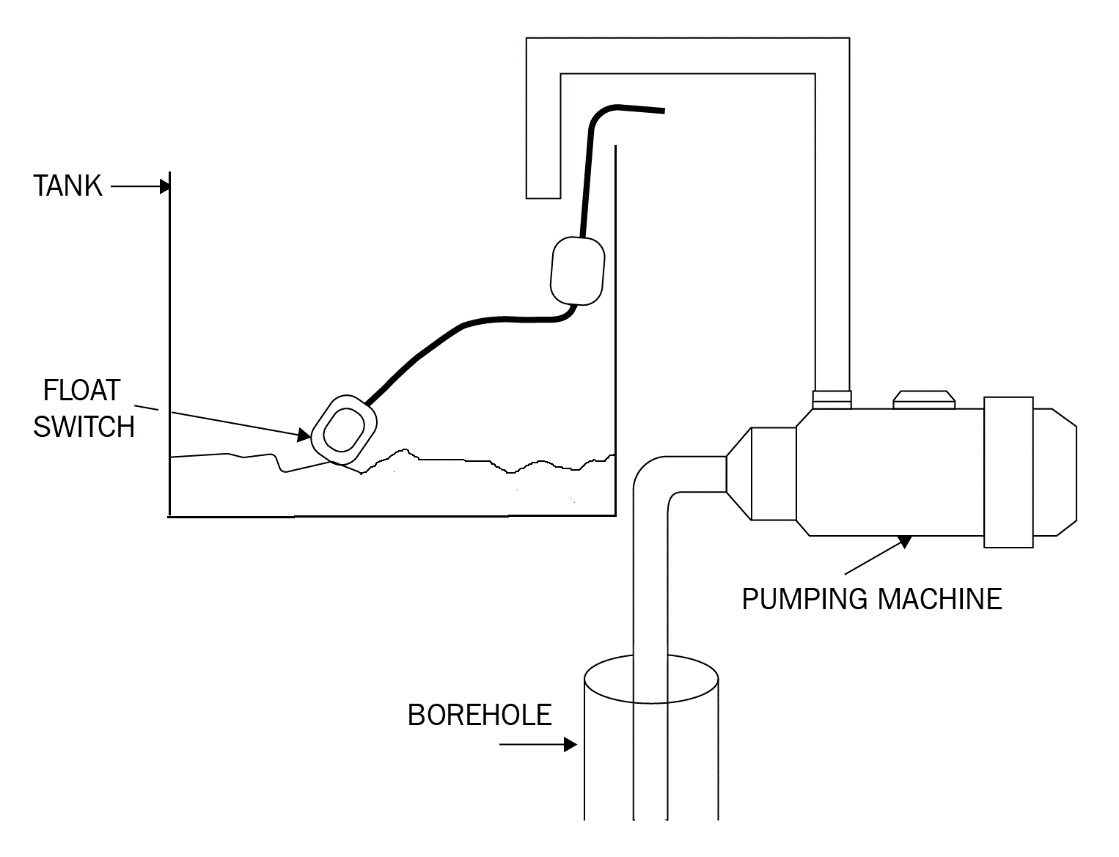
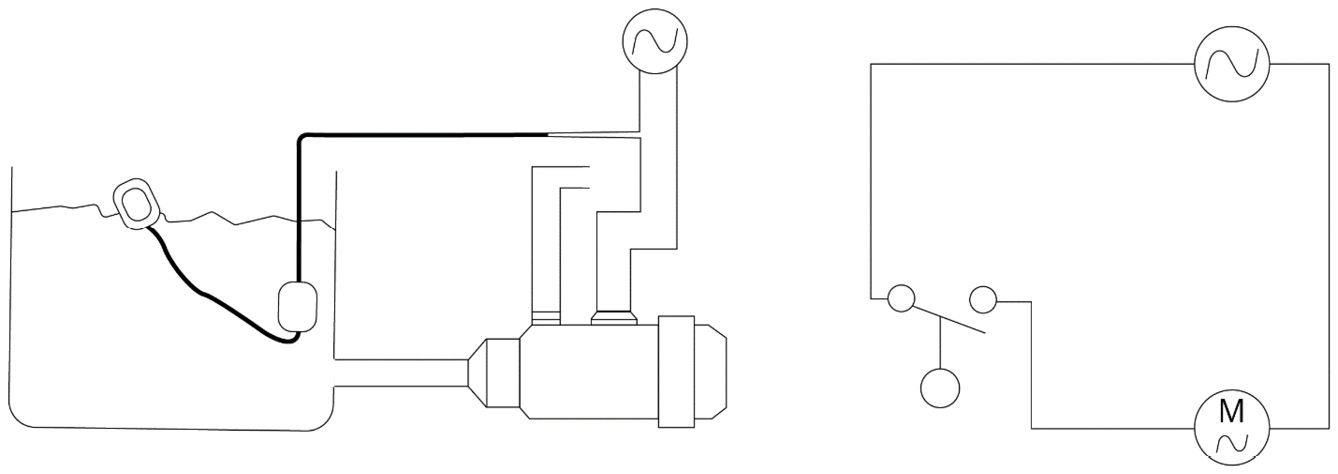
液位开关也可称为液位传感器。它可以检测容器中是否存在液体、粉末或颗粒材料。当液位过高或过低时,它可以自动控制电机或泵。有多种液位开关可供选择,包括浮控开关、电容式、超声波和振动叉。如下图所示,浮控开关是一种常见的液位开关,由空心浮体、内部机械开关(也称为传感器)和外部配重组成。固定点或外部配重将放置在容器或水箱中的一个固定位置,这样当水位上升或下降时,浮体中的内部机械开关就会在打开和关闭之间切换。开关的打开和闭合可以使水泵自动停止或启动,从而控制水箱中的水位:
浮控开关和水泵
下图显示了浮控开关的外观:

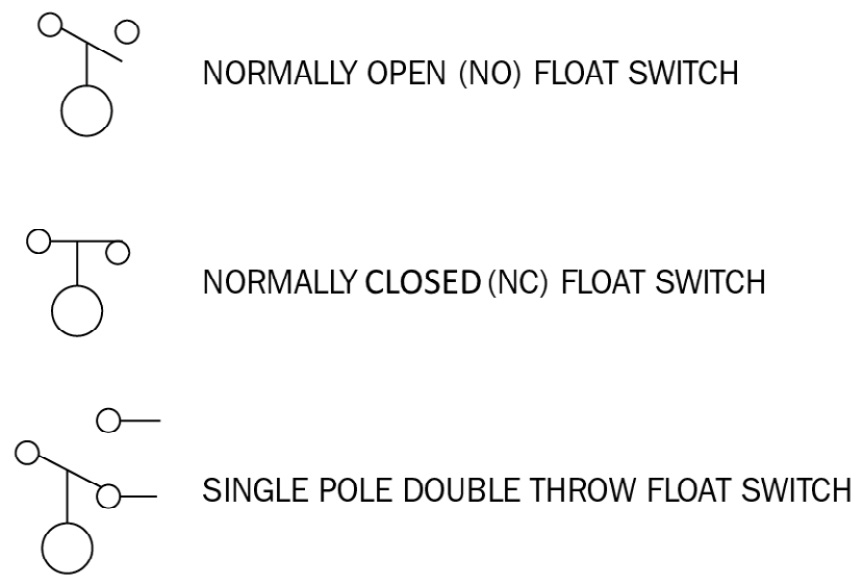
最基本的浮控开关是双线单刀单掷 (SPST) 浮控开关,可分为常闭和常开两种。也有三线的 SPDP 浮控开关。下图显示了各种浮控开关的符号:
接下来,我们将了解本节中提到的每种浮控开关。
- 常闭浮控开关
在常闭浮控开关中,电路在向下的位置闭合,在向上的位置断开。因此,在重力的作用下,浮控开关处于闭合状态;当液位上升到预设液位时,浮控开关将打开,如下图所示:
常闭浮控开关用于关闭向储罐注水的泵
在上图中,当水位较低时,浮控开关将闭合,电源将流向水泵,水泵将开始向水箱注水。当水位上升时,浮控开关将在预设点处打开,水泵将停止。
- 常开浮控开关
在常开浮控开关中,电路在向下位置时断开,在向上位置时闭合。因此,在重力的作用下,浮球开关处于打开状态,而当液面上升到预设液位时,浮球开关将关闭:
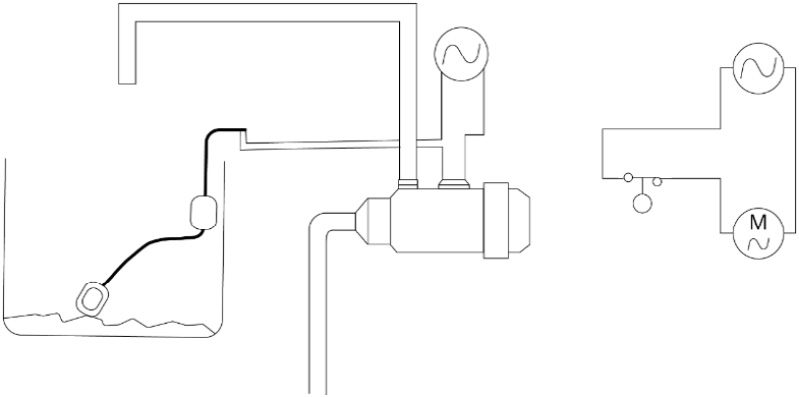
常开浮控开关,当水位满时自动清空水箱
在上图中,当水位满时,浮控开关闭合,电源流向水泵,水泵开始清空水箱(即从水箱中抽水)。当水位降低时,浮控开关将在预设点处打开,从而导致泵停止运行。
2.3.3 SPDT浮控开关
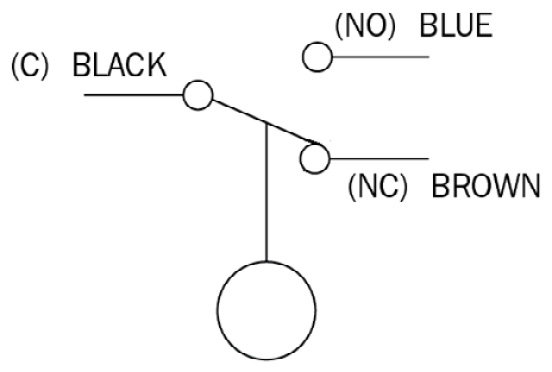
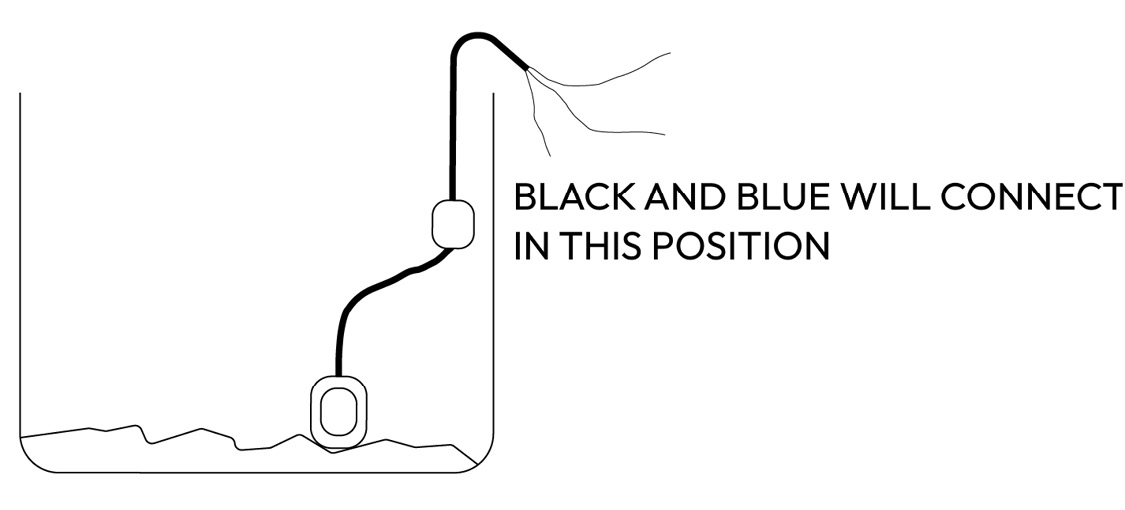
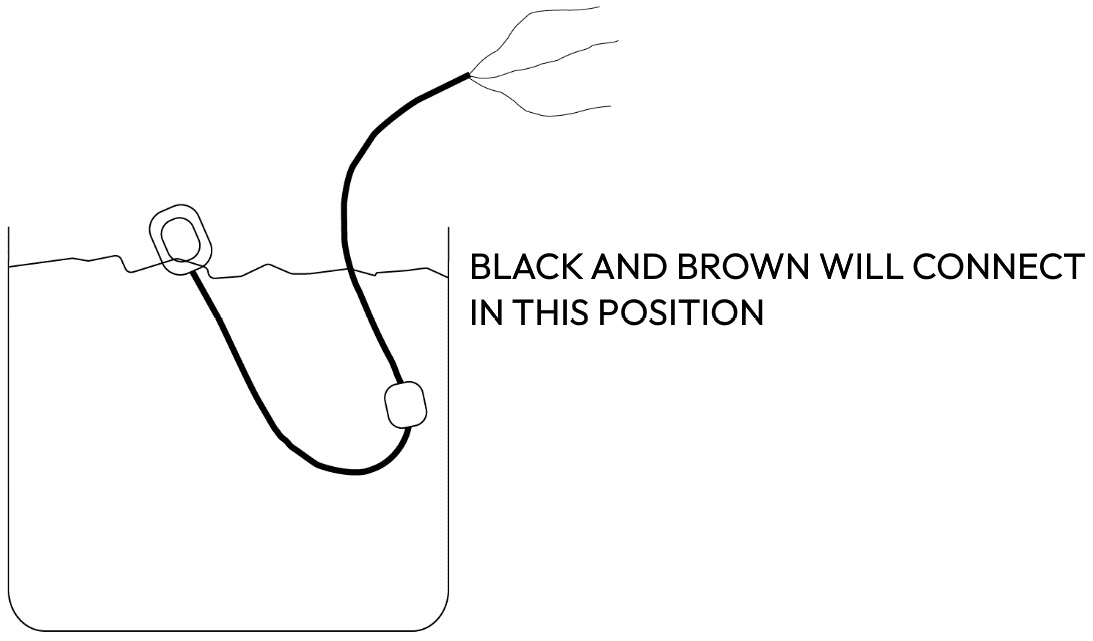
SPDT 浮控开关有三根线,通常为黑色、棕色和蓝色。当浮子处于低位时,黑线与红线断开,并与蓝线相连。当浮子处于高位时,黑线与蓝线断开,与红线相连。
向油箱注油:黑线和蓝线用于打开或关闭水泵。水位低时,黑线连接蓝线,水泵开始运行。水满时,黑线与蓝线断开,水泵停止。
清空水箱:浮控开关的黑线和棕线用于打开或关闭水泵。当水位较高时,黑线与棕线相连,水泵开始运行。水位低时,黑线与棕线断开,水泵停止。
在下一节中,我们将探讨另一种机械操作开关。
2.3.4 压力开关
压力开关是一种传感器,当压力增大或减小达到一定压力时,它就会闭合或断开电气触点。
机械压力开关由过程连接、测量元件、开关触点、电气连接和设定点调节螺钉组成。
机械压力开关的核心部分是测量元件。通常使用弹性膜片或不锈钢活塞。膜片适用于真空或最高16帕的低压范围,而活塞则适用于最高350帕的高压范围。工艺连接件和外壳通常由镀锌钢或黄铜制成。工艺连接件是连接气源或用于控制工艺的部件。开关触点是内部触点,随着压力的增大或减小而打开或关闭。电气连接件连接到内部电气触点,当压力升高或降低时,电气触点打开或关闭。设定点调节螺钉可用于校准或调节开关(即设定开关打开或关闭的压力)。
下图显示了压力开关的横截面:

压力开关的单极单投形式可分为常开和常闭两种。
在常开型中,当没有施加压力时,开关触点断开(未连接);当施加的压力等于设定值时,开关触点闭合。在NC型开关中,当没有施加压力时,开关触点闭合(连接);当施加的压力等于设定值时,开关触点断开。
开关的选择取决于您打算用开关驱动的电路类型。

下图显示了压力开关的接线,用于在达到设定点时关闭灯泡:

下图显示了压力开关的接线,用于在达到设定点时打开蜂鸣器:

2.3.5 温度开关
温度开关是一种在温度达到设定点或低于设定点时打开或关闭的开关。温度开关的设计由两部分组成:
- 传感器: 这可以是一个充满液体(液体、气体或双金属条)的传感球。它通常浸没在需要控制温度的过程中。
- 快动触点: 这些开关可接通或断开控制工艺温度的设备的电源。
温度开关有多种类型,包括双金属带温度开关和充液温度开关。
双金属带温度开关是最常见的温度开关之一。它由背靠背粘接的两种异种金属形成的矩形薄条组成。两种异种金属的热膨胀率不同。因此,当温度升高时,一种金属会比另一种金属膨胀得更快。这将导致带材弯曲。弯曲带可用于激活快动开关,从而打开或关闭电路。
下图显示了一个简单的双金属片温度开关:

充液温度开关(毛细管恒温器)由封装在金属管(灯泡和毛细管)中的液体组成。温度变化时,液体膨胀或收缩。液体的变化会移动头部,从而触发快动开关,打开或关闭电路。
下图所示为毛细管恒温器(一种充满液体的温度开关):

下图显示温度开关的符号:

在本节中,您了解了工业中用于某些过程自动化的各种机械操作开关。您还了解了用于不同开关的各种符号。这些符号对于阅读原理图非常重要。了解如何为这些开关接线也很有益处。从本节获得的知识将有助于您更好地理解下一节内容。
参考资料
- 软件测试精品书籍文档下载持续更新 https://github.com/china-testing/python-testing-examples 请点赞,谢谢!
- 本文涉及的python测试开发库 谢谢点赞! https://github.com/china-testing/python_cn_resouce
- python精品书籍下载 https://github.com/china-testing/python_cn_resouce/blob/main/python_good_books.md
- Linux精品书籍下载 https://www.cnblogs.com/testing-/p/17438558.html
2.4 近接传感器(电容式、电感式和光电式)
近接传感器常用于工业应用中。了解接近传感器有助于理解其他类型的传感器。近接传感器利用电磁场、光或声音检测物体的存在与否。传感器有多种类型,每种类型都适合特定的环境或应用。
现有的接近传感器类型如下:
- 电感式近接传感器
- 电容式近接传感器
- 光电式近接传感器
在接下来的几节中,我们将逐一介绍这些接近传感器。
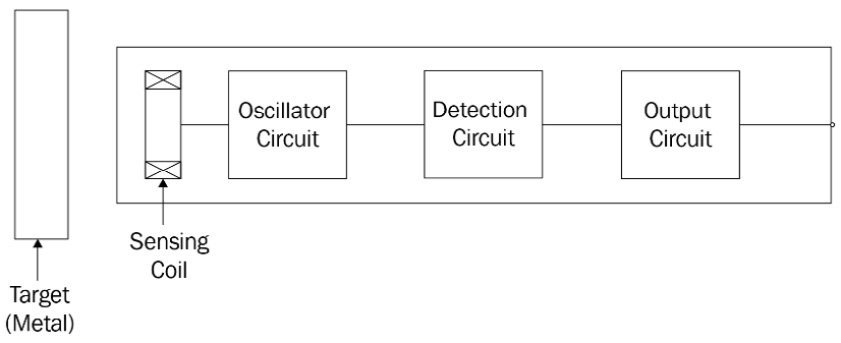
2.4.1 电感式近接传感器
这是一种非接触式传感器,可检测碳钢、不锈钢和铸铁等黑色金属。
电感式接近传感器由线圈、振荡器、检测电路和输出端组成。振荡器提供一个振荡磁场,围绕位于传感器表面的线圈绕组辐射。当铁质金属靠近磁场时,金属表面会感应出一个小电流(涡流)。这个小电流会改变磁路的固有频率,进而降低振荡幅度。检测电路对振荡幅度进行监测,当振荡幅度降低到一定程度时,输出电路会触发输出。
如果传感器采用NO配置,当金属进入感应区域时,传感器将产生ON信号。如果是NC配置,当金属进入感应区域时,其输出为 OFF信号。可编程逻辑控制器 (PLC) 或其他形式的控制器可读取该输出,并将接通或断开状态转换为可用信息。
下图显示了电感式近接传感器的主要电路:
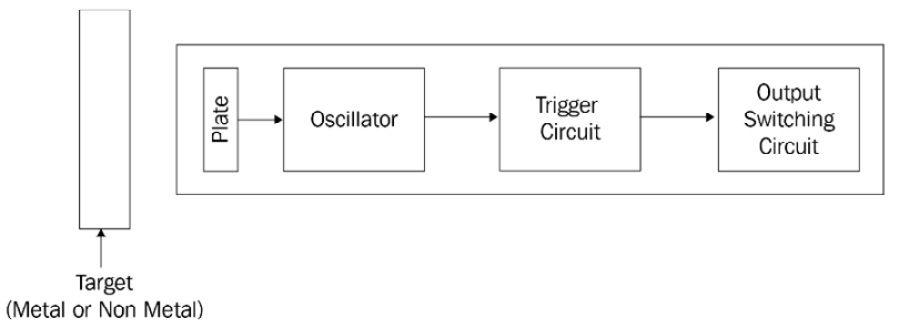
2.4.2 电容式近接传感器
这是一种非接触式传感器,可检测粉末、颗粒、液体和固体形式的金属和非金属物体。电容式传感器的作用类似于电容器。它们利用电容的电气特性以及传感器有源面周围电场变化引起的电容变化。
传感器感应面上的金属板就像电容器的第一块板,与内部振荡电路电连接。要感应的物体则充当电容器的第二板。
目标和内部传感器板之间的外部电容构成振荡器电路中反馈电容的一部分。当目标接近传感器表面时,振荡增加,直至达到阈值水平并激活输出。
下图显示了电容式接近传感器的主要电路:
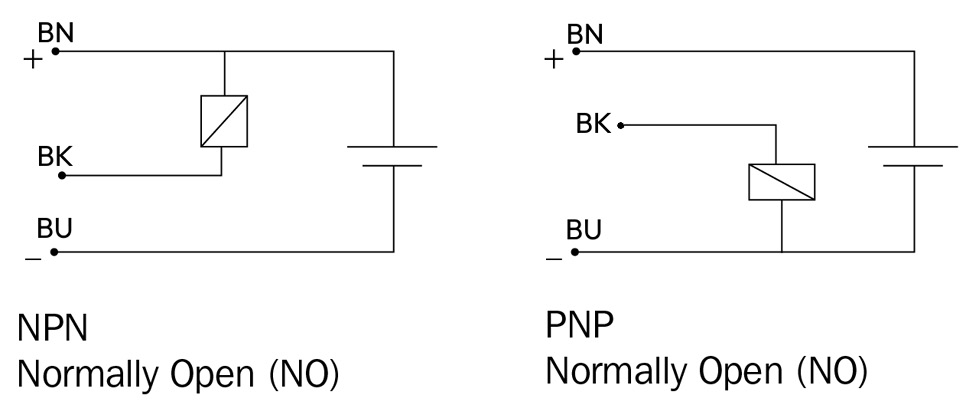
下图显示的是三线电容式传感器。这三根导线如下
- BN(棕色)
- BK(黑色)
- BU(蓝色)

以下接线图通常出现在三线式接近传感器的机身上,可分为NPN和PNP两种。对于NPN,电源将连接到BN和BU,而负载将跨接到BN和BK。对于PNP,电源将连接至BN和BU,而负载将跨接至BN和BK:
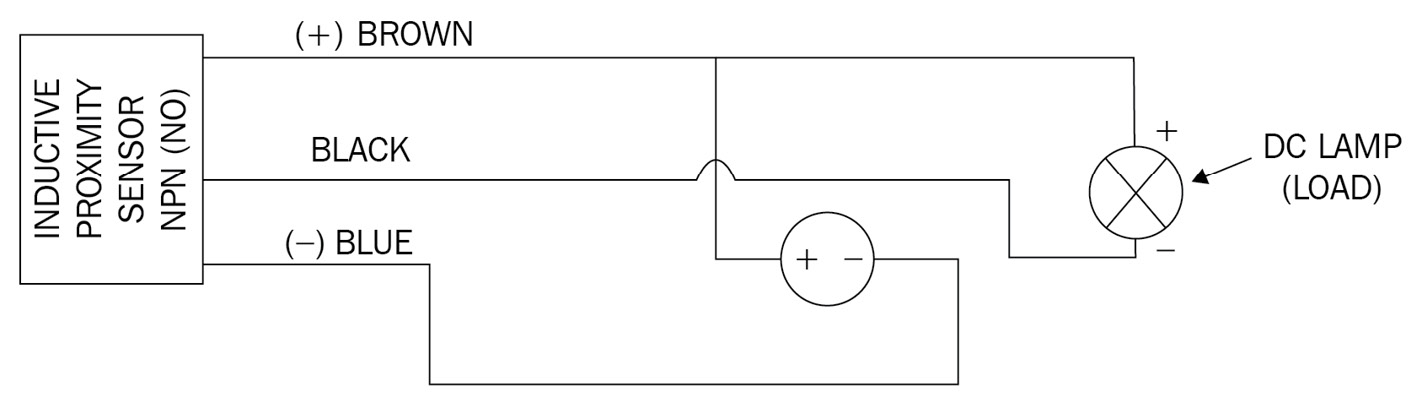
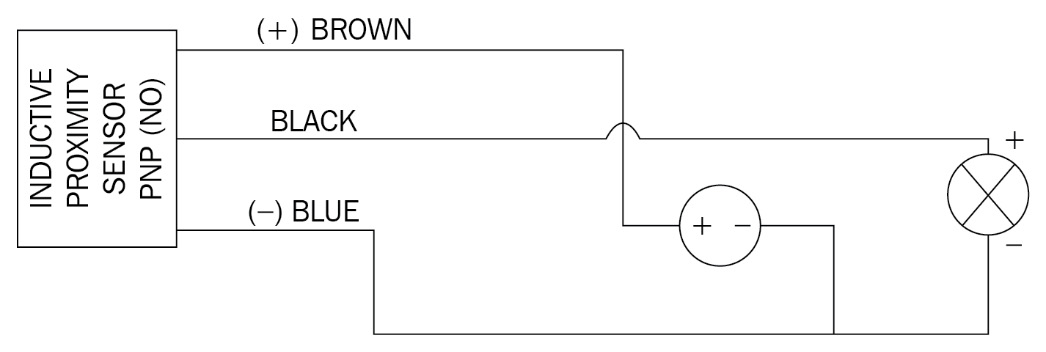
下图是如何使用三线制接近传感器(NPN)开启或关闭直流灯的简单接线图:
另一方面,如何使用三线制接近传感器 (PNP) 打开或关闭直流灯的简单接线图如图所示:
现在,让我们来看看下一种接近传感器。
2.4.3 光电传感器
光电传感器由光发射器(发送器)、光接收器和支持电路组成。它们通过使用光发射器和接收器来检测物体是否存在。
发射器向检测接收器发射一束可见光或不可见光。
光电传感器有以下三种类型:
-
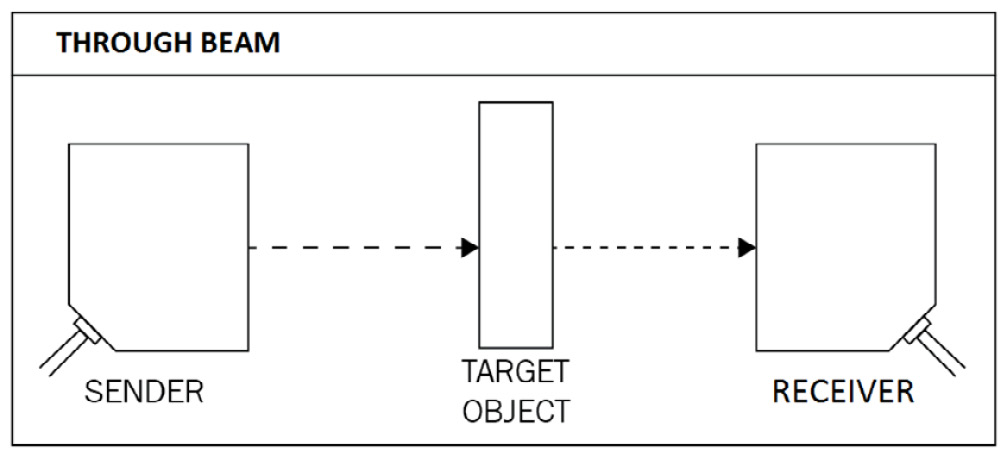
直通光束: 使用这种传感器时,发射器(发送器)和接收器位于一个单独的外壳中,并面对面放置。发送器提供一束恒定的光束;当物体从发送器和接收器之间通过时,光束会被打断,从而进行检测。下图对此进行了说明:
-
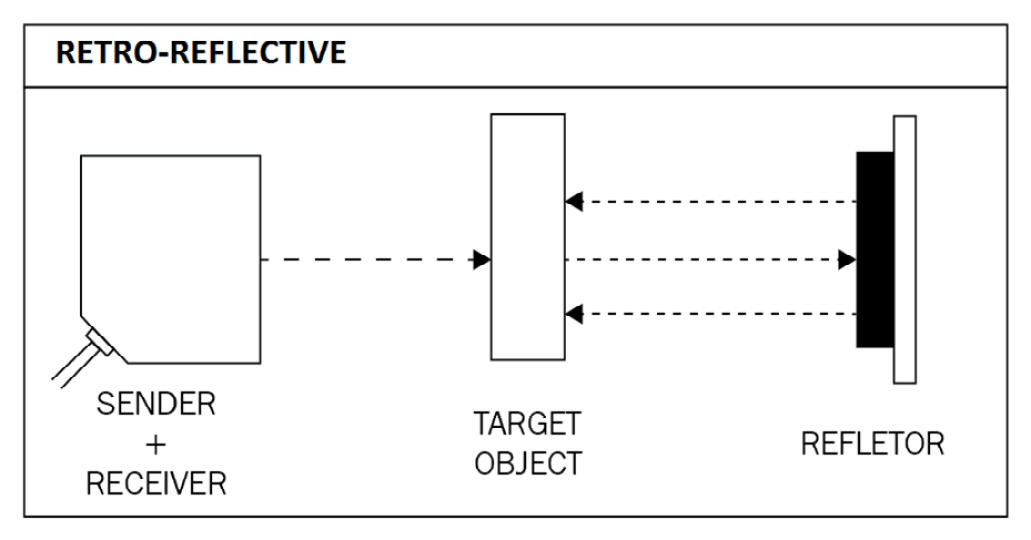
逆反射式: 逆反射式传感器的工作原理与通过式光电传感器类似。与通过式光电传感器不同的是,发送器和接收器位于同一外壳内,朝向同一方向。发射器产生一束光,射向反射器,然后反射器将光束折射回接收器。当光路受到干扰或中断时,就会发生检测。下面就是这种情况:
- 漫反射式
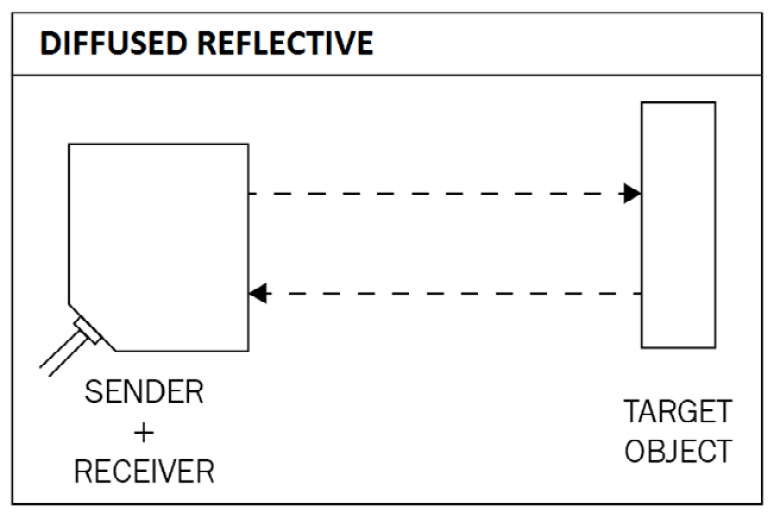
使用这种传感器时,发射器和接收器位于同一外壳内,朝向同一方向。发射器发出一束向各个方向扩散的恒定光束,充满探测区域。当目标物体进入该区域时,会将部分光束偏转回接收器。目标物起到反射器的作用。当光线从干扰(或目标)物体上反射时,就会发生探测。让我们来看看这一点:
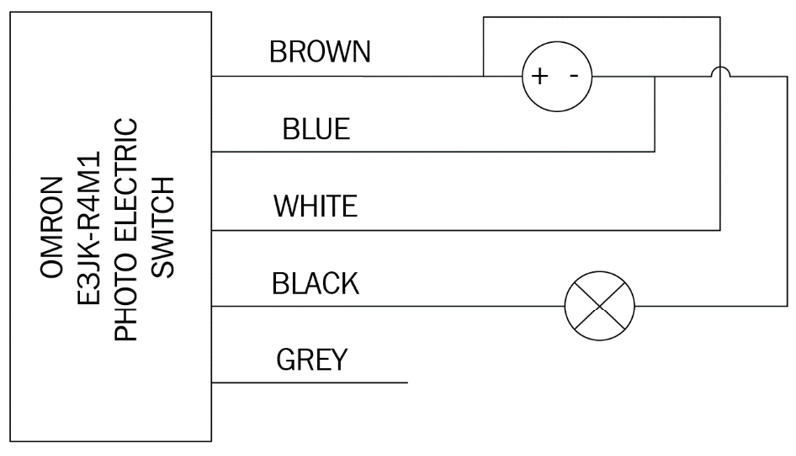
下图显示了逆反射式光电传感器的接线。逆反射式接近传感器在当今工业中很常见。它们适用于远距离检测:

在该接线图中,传感器有以下五根导线:
- BN (棕色)
- BU(蓝色)
- WH(白色)
- BK(黑色)
- GY(灰色)
BN和BU线将连接电源。WH是共用线,根据传感器输出端子(BK和GY)的要求,它将连接到正极或负极。
当WH连接到正极时,GY已为正极,当有障碍物时,BK为正极。
当WH连接负极时,负极已在GY处,当有障碍物时,负极将在BK处。
下图显示了如何通过将公共端 (WH) 连接至正极,使用传感器自动打开或关闭直流电灯:
在本节中,您了解了工业中使用的各种接近传感器。本节中所学到的操作原理、符号和简单接线,将帮助你更好地理解工业自动化。
2.5 小结
恭喜您完成了本章的学习!现在您应该能够解释开关和传感器,描述手动操作开关及其各种类型,描述机械操作开关及其各种类型,以及描述接近传感器及其各种类型。您还应该能够识别各种开关的符号,并了解它们是如何接线以执行控制功能的。