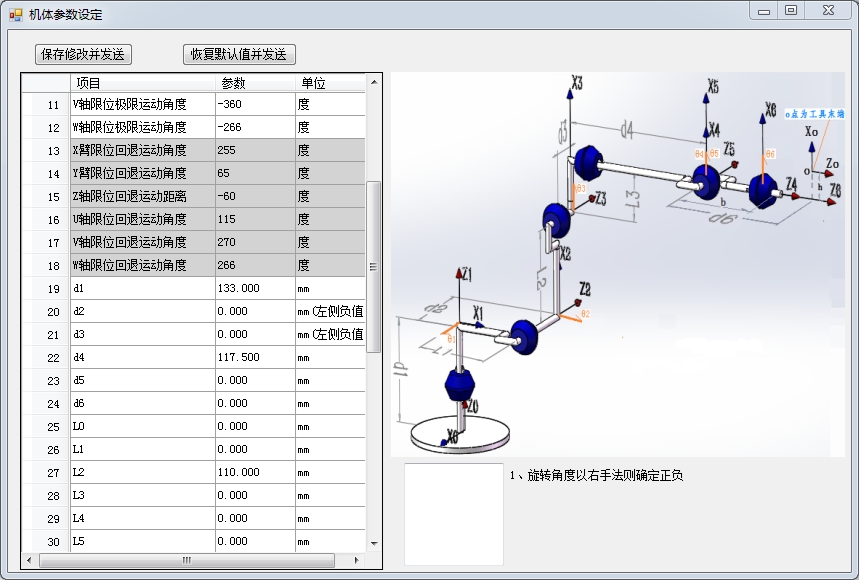
6轴机械臂 运动控制器,运动控制卡
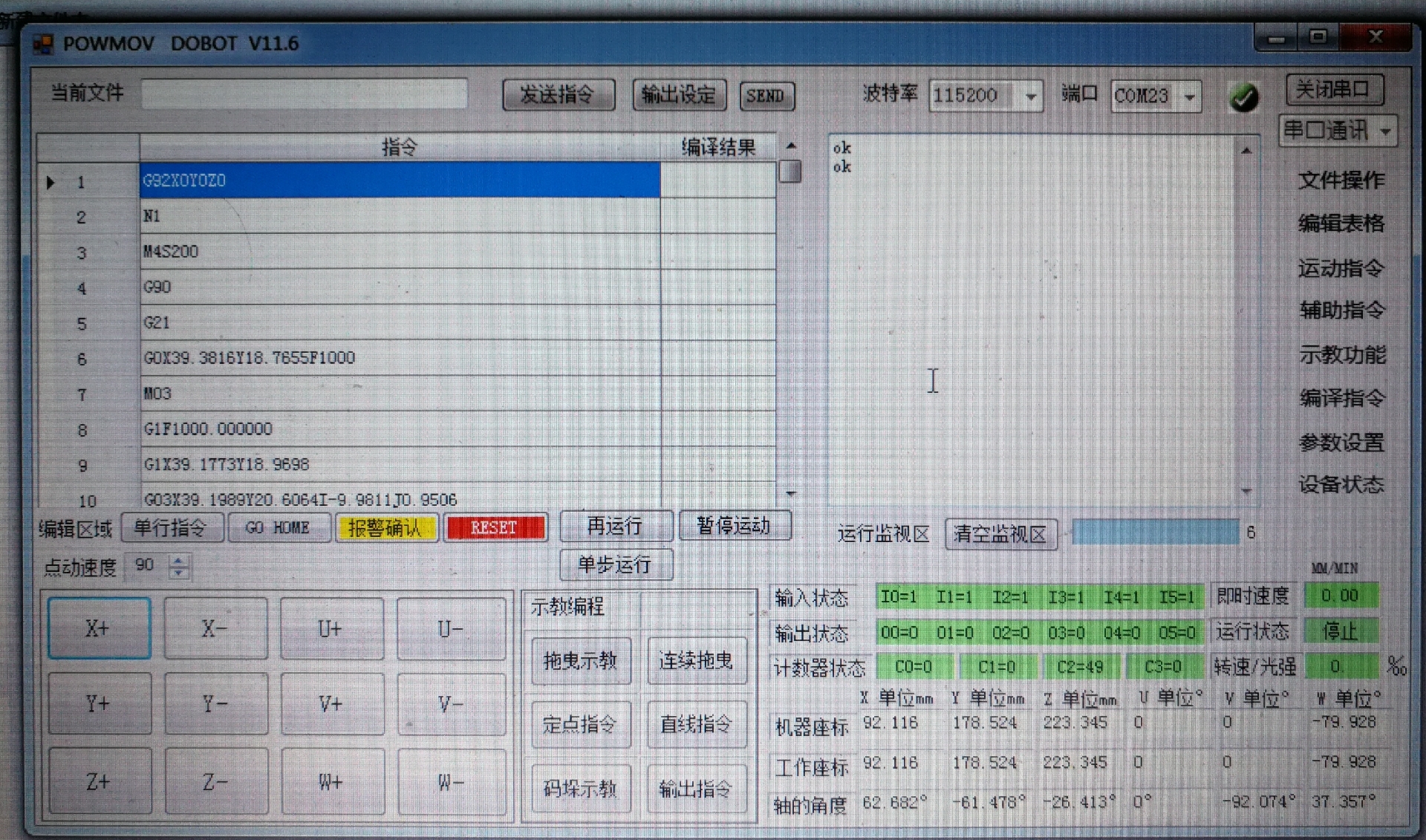
采用前瞻运动轨迹规划,通用G代码指令编程,G5指令三维空间的圆弧插补,空间直线插补,子程序编程功能,逻辑判断语句功能,示教编程功能(支持手柄),变量位置编程功能,动态PWM激光输出功能(兼容舵机控制信号),动态频率脉冲输出功能(可供高速点胶,喷绘使用),通用输入输出功能。
可极简单的实现任意绘图雕刻,3维激光切割功能、实现末端欧拉角姿态固定的变位运动、实现末端tcp坐标固定的变换欧拉角运动。
任意轨迹图形整体xy平面旋转功能。
(可利用变量位置,获取外部坐标,轻松配合机器视觉)。
卡上一键脱机RAM区运行功能,2M容量。
可设置4组平移工件坐标系,2组参考原点。
新增2组空间旋转工件坐标系,支持任意图形直接空间旋转。
关节6轴卡新增4点法工具tcp标定
断电后位置记忆,变量坐标位置记忆,计数器记忆。
伺服报警输入功能。
USB CDC 通讯控制卡
新增支持探针功能,可用于测6轴末端工具尺寸。
测平面,测外形等。
可接入5路增量AB相编码器
或者定制接入6路modbus绝对值编码器,无需每次上电home运动。
回原点运动轴选择设定,更便于机器人标定
逻辑运算指令,兼具了简单PLC功能
modbus从站通讯协议,方便用户自主开发
5~6轴拖曳示模式教功能
连续轨迹拖曳示教功能
专用码垛指令,专用码垛示教指令,极简单的编程方式
可扩展以太网或wifi通讯
ID:35215606813179829