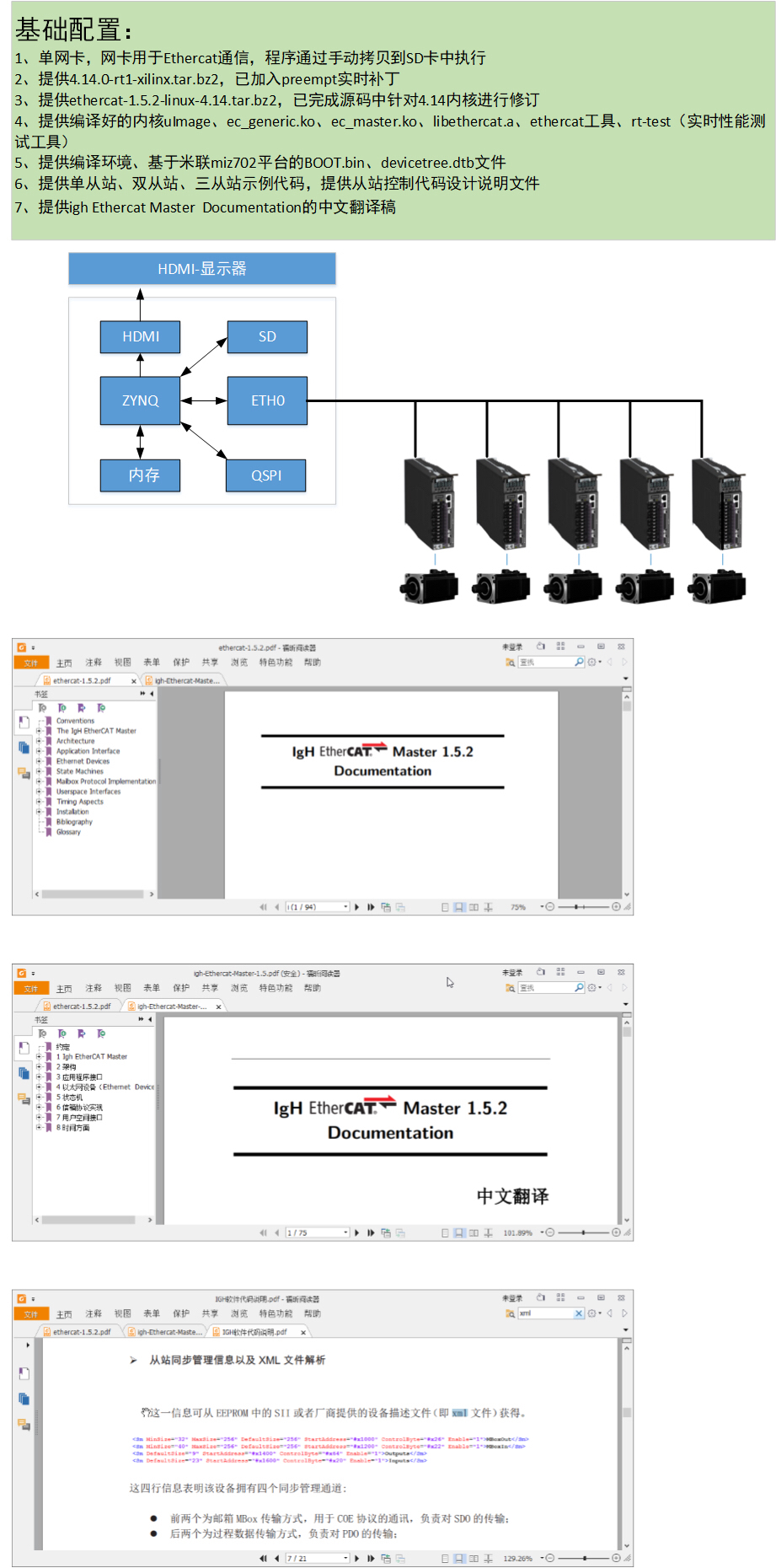
igh ethercat主站 zynq igh ethercat 1.5.2
xenomai linux rt preempt
资源占用极少
源码、文档减少您摸索的时间,示例代码简单易懂,提供多轴运行示例
仅仅提供电子资料,如果使用的开发板非米联miz702,请联系后再拍
配置如下:
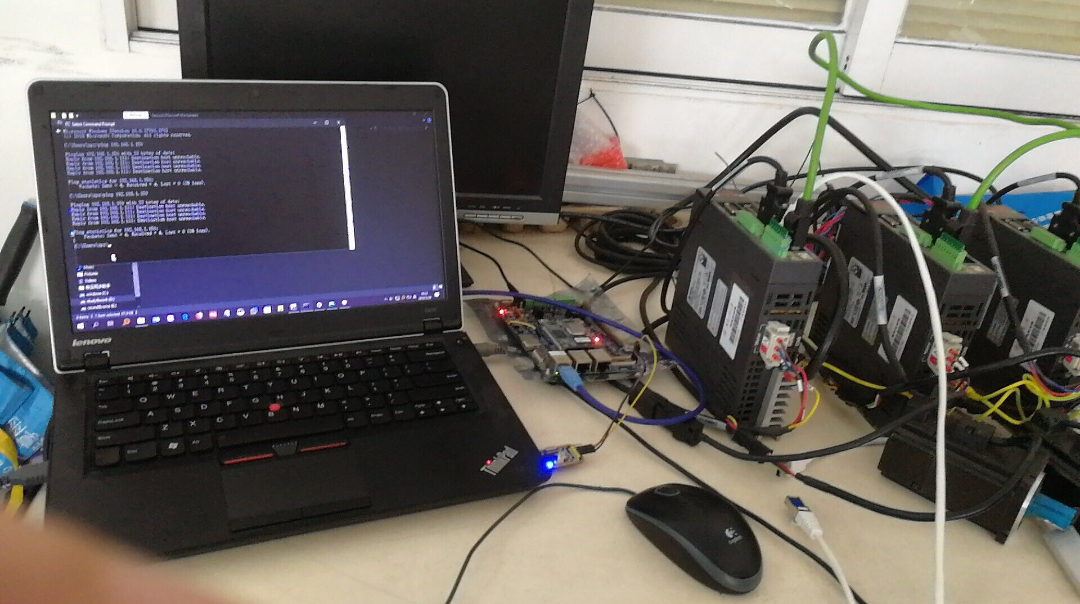
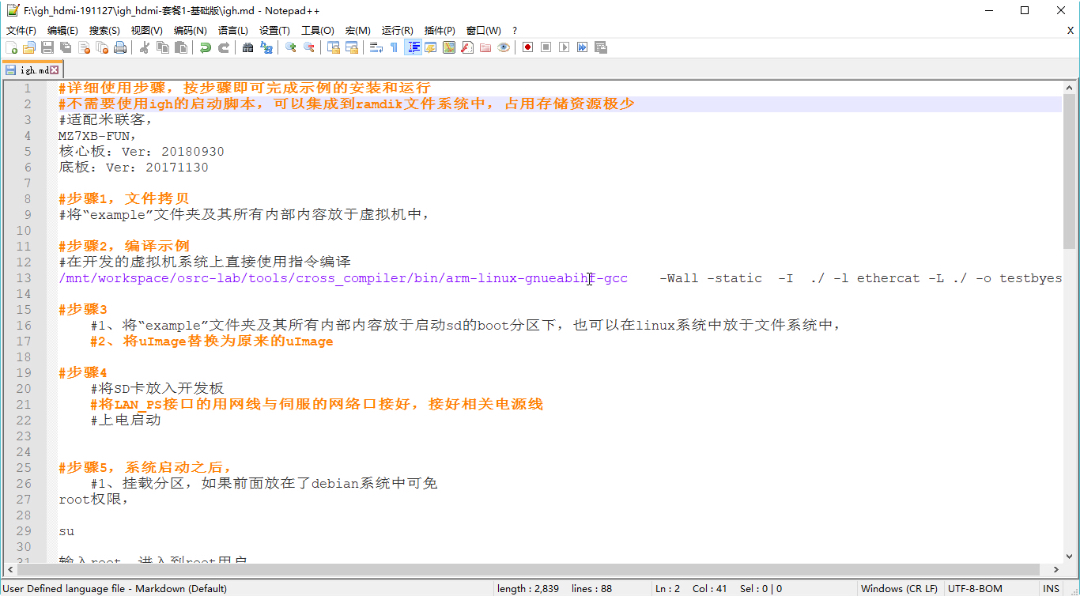
1、单网卡,网卡用于Ethercat通信,程序通过手动拷贝到SD卡中执行
2、提供4.14.0-rt1-xilinx.tar.bz2,已加入preempt实时补丁
3、提供ethercat-1.5.2-linux-4.14.tar.bz2,已完成源码中针对4.14内核进行修订
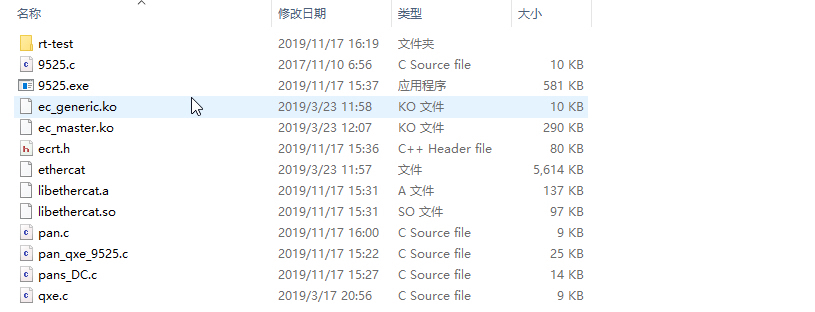
4、提供编译好的内核uImage、ec_generic.ko、ec_master.ko、libethercat.a、ethercat工具、rt-test(实时性能测试工具)
5、提供编译环境、基于米联miz702平台的BOOT.bin、devicetree.dtb文件
6、提供单从站、双从站、三从站示例代码,提供从站控制代码设计说明文件
7、提供igh Ethercat Master Documentation的中文翻译稿
方案一:preempt-rt,支持x86、zynq7020、7010,兼容性好
方案二:xenomai3,支持x86,实时性更优
提供松下、台达、安川等伺服驱动器多轴驱动示例源码
igh EtherCAT主站是一种用于实时通信的技术,它可以与Zynq平台上的igh EtherCAT 1.5.2进行集成。这个系统使用了Xenomai Linux RT Preempt内核,它具有低资源占用的特点。为了方便用户使用,我们提供了丰富的资源,包括源码、文档和示例代码,以减少用户的摸索时间。如果您使用的是非米联MIZ702开发板,请在购买前与我们联系。
配置方面,我们提供了单网卡配置,该网卡用于EtherCAT通信,并且程序可以通过手动拷贝到SD卡中执行。我们还提供了已经加入了Preempt实时补丁的4.14.0-rt1-xilinx.tar.bz2内核,以及已经修订过针对4.14内核的ethercat-1.5.2-linux-4.14.tar.bz2源码。此外,我们还提供了编译好的内核uImage、ec_generic.ko、ec_master.ko、libethercat.a、ethercat工具和rt-test实时性能测试工具。为了方便用户使用,我们还提供了编译环境、基于米联MIZ702平台的BOOT.bin和devicetree.dtb文件。
除了基础资源,我们还提供了单从站、双从站和三从站的示例代码,以及从站控制代码的设计说明文件。此外,我们还提供了igh EtherCAT Master Documentation的中文翻译稿。
根据您提供的信息,涉及到的知识点和领域范围包括:
- EtherCAT通信协议:EtherCAT是一种实时以太网通信协议,用于工业自动化领域中的实时控制和通信。
- Zynq平台:Zynq是Xilinx推出的一款SoC(系统级芯片),它集成了ARM处理器和可编程逻辑部分,适用于嵌入式系统开发。
- Xenomai和RT Preempt内核:Xenomai和RT Preempt是Linux内核的实时补丁,用于提供实时性能和可预测性。
- igh EtherCAT Master:igh EtherCAT Master是一个用于控制EtherCAT网络的软件模块,它提供了主站功能。
- 伺服驱动器:伺服驱动器是一种用于控制伺服电机的设备,常用于机器人、自动化设备等领域。
延申科普:
1. EtherCAT通信协议:EtherCAT是一种实时以太网通信协议,它在工业自动化领域中被广泛应用。与传统的以太网通信协议相比,EtherCAT具有更低的通信延迟和更高的实时性能。它采用了主从结构,其中主站负责控制和同步从站的操作。EtherCAT网络可以支持多个从站,从站之间可以并行地进行通信,从而提高了系统的效率和灵活性。
2. Zynq平台:Zynq是Xilinx推出的一款SoC(系统级芯片),它集成了ARM处理器和可编程逻辑部分。Zynq平台的独特之处在于它可以同时运行处理器和FPGA逻辑,这使得它非常适合于嵌入式系统开发。Zynq平台可以提供高性能的计算能力和灵活的可编程性,使得它在工业自动化、通信、图像处理等领域得到了广泛应用。
3. Xenomai和RT Preempt内核:Xenomai和RT Preempt是Linux内核的实时补丁,它们用于提供实时性能和可预测性。实时系统需要满足严格的时间约束,能够在规定的时间内响应和处理任务。Xenomai和RT Preempt内核通过对Linux内核进行修改和优化,提供了更好的实时性能。Xenomai主要用于x86架构的系统,而RT Preempt则适用于多种硬件平台。
4. igh EtherCAT Master:igh EtherCAT Master是一个用于控制EtherCAT网络的软件模块,它提供了主站功能。主站负责与从站进行通信和同步,控制从站的操作。igh EtherCAT Master具有丰富的功能和灵活的配置选项,可以满足不同应用场景的需求。它提供了一系列的API和工具,使得开发者可以方便地进行EtherCAT网络的开发和调试。
5. 伺服驱动器:伺服驱动器是一种用于控制伺服电机的设备。伺服电机是一种特殊的电机,它可以根据控制信号精确地控制转速和位置。伺服驱动器负责接收控制信号,并将其转换为电机驱动信号,从而控制电机的运动。伺服驱动器通常具有高性能的控制算法和丰富的接口选项,可以满足不同应用场景的需求。在工业自动化领域,伺服驱动器常用于机器人、自动化设备等系统中。
ID:9218000591560905549