《STMGCN: Mobile Edge Computing-Empowered Vessel Trajectory Prediction Using Spatio-Temporal Multigraph Convolutional Network》
论文链接:https://doi.org/10.1109/TII.2022.3165886
摘要
利用移动边缘计算MEC范例提出基于时空多图卷积网络(STMGCN)的轨迹预测框。STMGCN由三个图组成,分别根据社会力量、距离最近接近点的时间和周围船只的大小进行重构,然后引入时空多图卷积层将三种图共同嵌入预测框架,还引入自注意力时序卷积层。
MEC是一种计算基础设施,它在尽可能靠近数据源的地方执行计算任务。
引言
最近船舶轨迹预测方法忽略本船与周围船舶之间的不同相互作用
贡献:
- 时空多图卷积层将周围船舶之间的动态相互作用模型化,将船舶轨迹特征嵌入预测框架。
- 自注意力时序卷积层解决与递归单元相关的问题。
- 在不同水域的实际船舶轨迹进行评估。
定义与问题描述
- 船舶轨迹中的时间戳点P:\((\varphi ,\lambda ,\theta)\),其中\(\theta\)是时间戳,\(\varphi, \theta\)是时间戳点的经度和纬度(使用大地测量系统表示,采用墨卡托投影法将所有时间戳点的地理经纬度坐标转换为笛卡尔坐标)。
大地坐标:(B,L,H)(纬度、经度、大地高)
笛卡尔坐标:(x,y,z)
转换方法:https://blog.csdn.net/weixin_41785349/article/details/116007059

船舶轨迹T:\(T={P^1 ,\dots,P^{\theta},\dots,P^{\Theta} }\),其中\(\Theta\)是时间戳点的数量。
- 船舶轨迹的图(空间图)表示:\(G^{\theta}=(V^{\theta},E^{\theta})\),顶点集\(V^{\theta}=(\nu^{\theta} _m|\forall m \in {1,...,M})\),\(\nu^{\theta} _m\) 与第m个船舶轨迹的观测位置\(\nu^{ \lambda} _m, \nu^{ \lambda } _m\)有关,边集 \(E^{\theta}=(e^{\theta} _{m,n}|\forall m,n \in {1,...,M})\)。
- 问题:船舶轨迹预测视为从历史船舶轨迹中学习投影函数F。
其中 \(C_{obs}\) 是轨迹的多图表示,C是参数,\((\overline{\varphi} ^{\theta} _m ,\overline{ \lambda} ^{\theta} _m)\)是第m个轨迹中第 \(\theta\) 个时间戳点的经纬度坐标。
模型架构
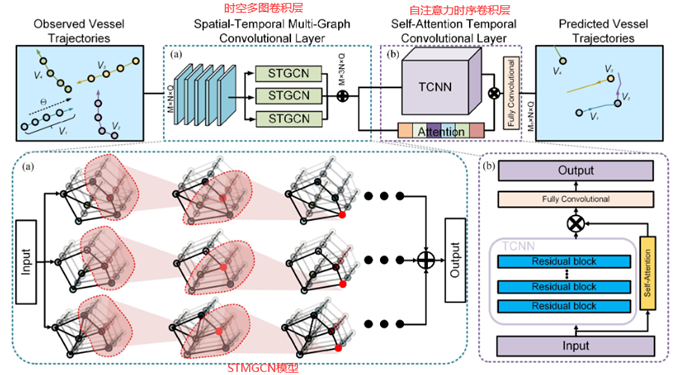
STMGCN模型的架构图
Spatio-Temporal MutiGraph Convolutional Layer时空多图卷积层--生成时空顶点嵌入
船舶轨迹的多图表示法:社会力图\(G_S\)、最近接近点时间图(TCPA)\(G_T\)、船舶尺寸图\(G_V\),每个图定义为(G,E),与G对应的加权邻接矩阵A,\({A^1, \dots, A^{\Theta}}\),对每个图G卷积运算学习特征。
- 船舶轨迹的多图表示
-
社会力图\(G_S\):邻接矩阵\(A_S\) 模拟相邻点之间的距离关系,每个元素表示:

两个顶点之间的欧式距离

距离函数:
L1距离(曼哈顿距离)

L2距离(欧式距离、欧式长度、L2范数、欧几里德范数)
-
最近接近点时间图\(G_T\):评估船舶碰撞风险的常用指标,每个元素表示:

-
船舶尺寸图\(G_V\):大小相似的船舶在航行过程中表现出相似的运动行为,每个元素表示:
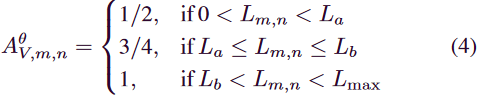
\(L_{m,n}\)表示第m个和第n个船舶之间的长度差,\(L_{max}\)是最大差值,通常\(L_a=1/3L_{max},L_b=1/3L_{max}\)。
-
图卷积操作
对\(G_S,G_T,G_V\)进行图卷积操作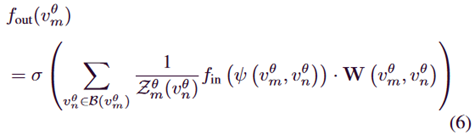
-
STMGCL的实现(由三个STGCN组成)
对邻接矩阵归一化

STGCN:

其中\(\widehat{A}^{\theta}=A^{\theta}+I\),\(D^{\theta}\)是 \(\widehat{A}^{\theta}\) 的顶点度数的对角矩阵,\(\widehat{A}\) D表示 \(\widehat{A}^{\theta}\) 和 \(D^{\theta}\) 的堆叠版。
STGCN的嵌入结果:\(V\in R^{M\times N \times Q}\),三层STGCN的嵌入结果合并为 \(\widehat{V} \in R^{M\times3N\times Q}\)。
Selfattention Temporal Convolutional Layer自注意力时空卷积层轨迹外推
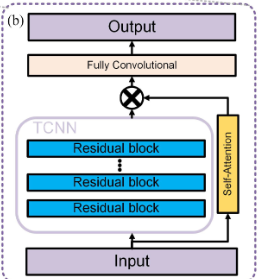
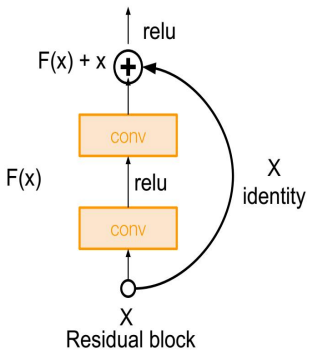
SATCL能从\(\widehat{V}\)中学习多图嵌入特征并将其扩展为轨迹预测的必要条件,其中包含一个多层残差块和一个自注意力模块,每个残差块直接采用TCNN的通用框架。TCNN由多个残差块组成,涉及扩张的因果卷积核残差连接,示意图如下:
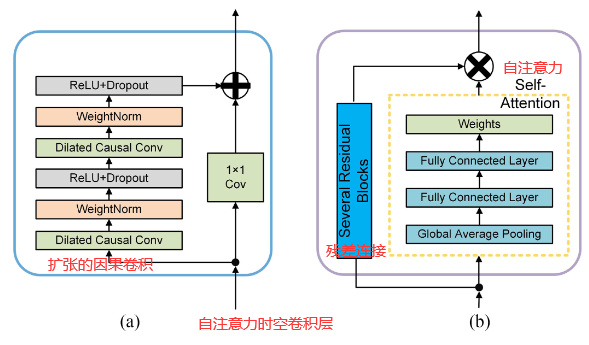
自注意力时空卷积层的示意图
扩张的因果卷积
因果卷积
时间序列推测问题可以描述为:
普通卷积的基础上强调\({x_1,...,x_t}\)中的先后依赖关系(也就是时间上的因果关系)。
普通神经网络中的每层神经元的连接是全连接形式,违背了时间先后的基本约束,因为前一时刻的神经元与后一时刻的神经元相互产生连接是不被允许的。通过掩膜的方式将网络中逐层的连接部分去除,保留从前往后的连接,使得网络满足时间上的前后依赖原则。示意图如下:
缺点:因果卷积对历史信息的覆盖范围不大,例如上面的图,最后的输出结果只能基于第一层输入中的5分神经元计算,更前面的输入信息丢失浪费。
扩张卷积
扩大因果卷积对历史信息的感受视野,具体来讲就是在卷积核移动过程中加入了步长间隔参数。
残差连接skip connect(short cut)
思想:强行将一个输入添加到函数的输出
解决问题:弥补网络深度增加带来的梯度消失、梯度爆炸


损失函数
假设估计的时间戳点遵循双变量高斯分布,\((\varphi_m^\theta,\lambda_m^\theta)\sim\mathcal{N}(\mu_m^\theta,\sigma_m^\theta,\rho_m^\theta)\),其中\(\mu_m^\theta,\sigma_m^\theta\text{, and }\rho_m^\theta.\)表示分布的均值、方差、相关系数。最小化负对数似然损失函数来学习STMGCN的参数:
实验
数据集
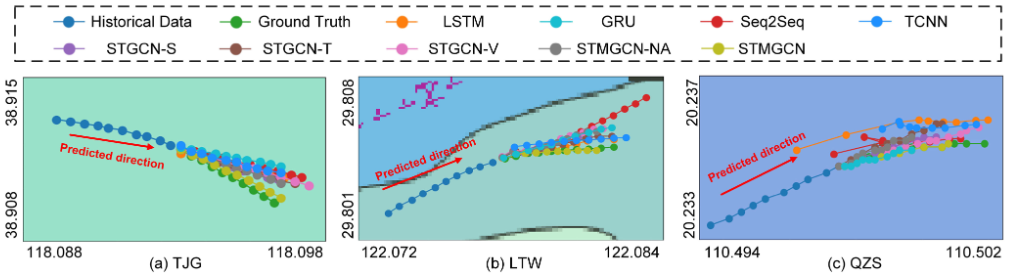
原始AIS数据来自天津港、螺头睡到和琼州海峡三个水域的联合AIS基站。由于天气恶劣、通信信道容量有限等原因原始AIS数据存在大量缺失数据、随机噪声和异常值,利用三次样条差值法对轨迹差值。通过投影法将水域划分为有限个网格,船只轨迹的经纬度坐标用网格的行和列表示。
基准和评估指标
基准:GRU、LSTM、Seq2Seq、TCNN、单一图场景(社会力图STGCN-S、最近接近点时间图STGCN-T、船舶尺寸大小图STGCN-V)、费注意力变体(STMGCN-NA)。实验结果如下。
评估指标:ADE(平均唯一误差)、FDE(最终位移误差)、MDE最大位移误差
结论
作者提出了一种基于多图卷积网络的船舶轨迹预测方法(即 STMGCN),它主要包含 STMGCL 和 SATCL 模块,有助于促进 MEC 支持的海事物联网中的态势感知和交通安全。
- 卷积 STMGCN Computing-Empowered Spatio-Temporal Convolutional卷积stmgcn computing-empowered spatio-temporal 卷积convolutional网路networks 卷积 神经网络convolutional神经 卷积withspatio-temporal convolutional multi-graph stmgcn computing-empowered spatio-temporal spatio-temporal representation recurrent feedback 流量 交通spatio-temporal self-supervised convolutional