layout: ../../layouts/MarkdownPostLayout.astro
title: 'MIT6.828 Lab1-1(分析boot.S文件)'
pubDate: 2024-01-10
description: 'something about 6.828'
author: 'liyishui'
tags: ["Os"]
一点小bug
突然发现之前环境配的不全,就按照 https://blog.csdn.net/Alagagaga/article/details/109735168 重新配了一遍环境,被cs144折磨得不清后配这个环境突然感觉非常简单。唯一的坑点是要用gcc32位,否则在make的时候会报错,教程里只给了安装gcc32的命令,但是只安装是不行的。
最后我删除了电脑上所有的gcc,然后单独安装gcc32。
命令如下
#打开终端,运行以下命令来卸载 64 位的 GCC:
sudo apt-get remove gcc
#运行以下命令来卸载 64 位的 GCC 库文件:
sudo apt-get autoremove
#如果你需要删除 GCC 的配置文件,可以运行以下命令:
sudo apt-get purge gcc
#下载gcc32
sudo apt-get install gcc-multilib
Exercise 2
进入到/6.828/lab目录下输入下列命令进入调试模式
sudo make qemu-gdb
然后新开一个终端进入到同样目录,输入
sudo make gdb
我在这里报错:显示连接localhost26000超时,仔细一看发现qemu运行在25000,gdb要连接的是260000,显然端口号不匹配,查看\lab\GNUmakefile,修改端口号

修改成26000后正常连接,在gdb终端输入si,会得到汇编指令。
以下是输入22次si得到的指令。
[f000:fff0] 0xffff0: ljmp $0xf000,$0xe05b
[f000:e05b] 0xfe05b: cmpl $0x0,%cs:0x6ac8
[f000:e062] 0xfe062: jne 0xfd2e1
[f000:e066] 0xfe066: xor %dx,%dx
[f000:e068] 0xfe068: mov %dx,%ss
[f000:e06a] 0xfe06a: mov $0x7000,%esp
[f000:e070] 0xfe070: mov $0xf34c2,%edx
[f000:e076] 0xfe076: jmp 0xfd15c
[f000:d15c] 0xfd15c: mov %eax,%ecx
[f000:d15f] 0xfd15f: cli
[f000:d160] 0xfd160: cld
[f000:d161] 0xfd161: mov $0x8f,%eax
[f000:d167] 0xfd167: out %al,$0x70
[f000:d169] 0xfd169: in $0x71,%al
[f000:d16b] 0xfd16b: in $0x92,%al
[f000:d16d] 0xfd16d: or $0x2,%al
[f000:d16f] 0xfd16f: out %al,$0x92
[f000:d171] 0xfd171: lidtw %cs:0x6ab8
[f000:d177] 0xfd177: lgdtw %cs:0x6a74
[f000:d17d] 0xfd17d: mov %cr0,%eax
[f000:d180] 0xfd180: or $0x1,%eax
[f000:d184] 0xfd184: mov %eax,%cr0
[f000:d187] 0xfd187: ljmpl $0x8,$0xfd18f
逐个看看
[f000:fff0] 0xffff0: ljmp $0xf000,$0xe05b:这条指令是一个长跳转指令,将程序控制权转移到地址 0xf000:e05b 处的指令。这条指令通过加载代码段选择子 $0xf000 和偏移量 $0xe05b 来进行跳转。
[f000:e05b] 0xfe05b: cmpl $0x0,%cs:0x6ac8:这条指令比较值 $0x0 和代码段寄存器 %cs 偏移量为 0x6ac8 的内存位置中的值。
[f000:e062] 0xfe062: jne 0xfd2e1:这条指令表示如果前一条指令的比较结果不相等,则跳转到地址 0xfd2e1 进行执行。
[f000:e066] 0xfe066: xor %dx,%dx:这条指令将寄存器 %dx 的值与自身进行异或操作,将 %dx 的值置为 0。
[f000:e068] 0xfe068: mov %dx,%ss:这条指令将寄存器 %dx 的值复制给栈段寄存器 %ss。
[f000:e06a] 0xfe06a: mov $0x7000,%esp:这条指令将立即数 $0x7000 的值赋给栈指针寄存器 %esp。
[f000:e070] 0xfe070: mov $0xf34c2,%edx:这条指令将立即数 $0xf34c2 的值赋给寄存器 %edx。
[f000:e076] 0xfe076: jmp 0xfd15c:这条指令无条件跳转到地址 0xfd15c 进行执行。
[f000:d15c] 0xfd15c: mov %eax,%ecx:这条指令将寄存器 %eax 的值赋给寄存器 %ecx。
[f000:d15f] 0xfd15f: cli:这条指令禁用中断。
[f000:d160] 0xfd160: cld:这条指令将方向标志位 %df 清零,表明字符串操作将按照递增的方向进行。
[f000:d161] 0xfd161: mov $0x8f,%eax:这条指令将立即数 $0x8f 的值赋给寄存器 %eax。
[f000:d167] 0xfd167: out %al,$0x70:这条指令将寄存器 %al 的值输出到端口 0x70。
[f000:d169] 0xfd169: in $0x71,%al:这条指令从端口 0x71 读取值,并将其赋给寄存器 %al。
[f000:d16b] 0xfd16b: in $0x92,%al:这条指令从端口 0x92 读取值,并将其赋给寄存器 %al。
[f000:d16d] 0xfd16d: or $0x2,%al:这条指令将立即数 $0x2 与寄存器 %al 进行逻辑或操作。
[f000:d16f] 0xfd16f: out %al,$0x92:这条指令将寄存器 %al 的值输出到端口 0x92。
[f000:d171] 0xfd171: lidtw %cs:0x6ab8:这条指令加载中断描述符表的界限,从代码段 %cs 偏移量为 0x6ab8 的内存位置读取。
[f000:d177] 0xfd177: lgdtw %cs:0x6a74:这条指令加载全局描述符表的界限和基址,从代码段 %cs 偏移量为 0x6a74 的内存位置读取。
[f000:d17d] 0xfd17d: mov %cr0,%eax:这条指令将控制寄存器 %cr0 的值赋给寄存器 %eax。
[f000:d180] 0xfd180: or $0x1,%eax:这条指令将立即数 $0x1 与寄存器 %eax 进行逻辑或操作。
[f000:d184] 0xfd184: mov %eax,%cr0:这条指令将寄存器 %eax 的值赋给控制寄存器 %cr0。
[f000:d187] 0xfd187: ljmpl $0x8,$0xfd18f:这条指令是一个长跳转指令,将程序控制权转移到代码段选择子 $0x8 和偏移量 $0xfd18f 处的指令。
上面给出的是汇编指令的字面意思,那组合起来到底在做什么呢?
首先设置了ss 和 esp寄存器(对应4、5条);
然后cli屏蔽了中断
cld则是一个控制字符流向的命令,和后面的in out有关,暂时先不管
再通过in out 和IO设备交互,进行一些初始化,打开A20门
接着lidtw lgdtw两条命令就是加载idtr gdtr寄存器
最后enable %cr0寄存器,进入实模式,长跳转到内核部分执行
这里面涉及到了一些东西,做个笔记:
-
PC开始运行时,CS = 0xf000,IP = 0xfff0,对应物理地址为0xffff0.第一条指令做了jmp操作,跳到物理地址为0xfe05b的位置。
-
CLI:Clear Interupt,禁止中断发生。STL:Set Interupt,允许中断发生。CLI和STI是用来屏蔽中断和恢复中断用的,如设置栈基址SS和偏移地址SP时,需要CLI,因为如果这两条指令被分开了,那么很有可能SS被修改了,但由于中断,而代码跳去其它地方执行了,SP还没来得及修改,就有可能出错。
-
CLD: Clear Director。STD:Set Director。在字行块传送时使用的,它们决定了块传送的方向。CLD使得传送方向从低地址到高地址,而STD则相反。
-
汇编语言中,CPU对外设的操作通过专门的端口读写指令来完成,读端口用IN指令,写端口用OUT指令。
-
地址卷绕:用两个 16 位的寄存器左移相加来得到 20 位的内存地址这里还是有问题。那就是两个 16 位数相加所得的最大结果是超过 20 位的。例如段基址 0xffff 左移变成 0xffff0 和偏移量 0xffff 相加得到 0x10ffef 这个内存地址是“溢出”的,怎么办?这里 CPU 被设计出来一个“卷绕”机制,当内存地址超过 20 位则绕回来。举个例子你拿 0x100001 来寻址,我就拿你当作 0x00001 。你超出终点我就把你绕回起点。
-
A20 gate:现代的 x86 计算机,无论你是 32 位的还是 64 位的,在开机的那一刻 CPU 都是以模拟 16 位模式运行的,地址卷绕机制也是有效的,所以无论电脑内存有多大,开机的时候 CPU 的寻址能力只有 1MB,就好像回到 8086 时代一样。 现在计算机都有个“开关”叫 A20 gate,开机的时候 A20 gate 是关闭的,CPU 以 16 位模式运行,当 A20 gate 打开的时候“卷绕”机制失效,内存寻址突破 1MB 限制,我们就可以切换到正常的模式下运行了。
-
从给 x86 通电的一刻开始,CPU 执行的第一段指令是 BIOS 固化在 ROM 上的代码,这个过程是硬件定死的规矩。而 BIOS 在硬件自检完成后(你会听到“滴”的一声)会根据在 BIOS 里设置的启动顺序(硬盘、光驱、USB)读取每个引导设备的第一个扇区 512字节的内容,并判断这段内容的最后 2 字节是否为 0xAA55。如果是说明这个设备是可引导的,于是就将这 512 字节的内容放到内存的 0x7C00 位置,然后告诉 CPU 去执行这个位置的指令。这个过程同样是硬件定死的规矩。
Exercise 3
在一个终端输入sudo make qemu-gdb开启qemu的调试模式,另一个终端输入make gdb开始调试。
在调试端(为了方便称输入make gdb的端为调试端)输入
b *0x7c00
显示“Breakpoint 1 at 0x7c00”,表明已经在0x7c00这个位置打了断点。
然后输入
x/20i 0x7c00
解释:x/20i 0x7c00 的意思是在内存地址 0x7c00 处开始,打印出接下来 20 条指令的汇编代码。
其中 "x" 表示以十六进制方式输出,"/20i" 表示输出 20 条指令的汇编代码,"0x7c00" 是指起始地址。
这条命令通常被用于在引导扇区代码中调试和查看代码。
跳出20条命令,如下图
在调试端输入
c //对的,输入单字母c
发现qemu端打印出Booting from Hard Disk

这是在做什么?
软盘或者硬盘的存储单元都是512字节的,每512一个字节称为一个扇区。512字节是disk最小的传输粒度,也就是说每次往硬盘写入的或者读出的数据都是512字节的整数倍的。如果一个硬盘是可引导的(bootable),那么他的第一个扇区叫做引导扇区,在这个扇区内部存放着boot loader。
当BIOS发现一个软盘或者一个硬盘是可引导的时候,BIOS会将引导扇区 (boot sector)内的bootloeader复制到内存的0x7c00处(cs:ip=0x0000:0x7c00),然后BIOS会执行一个jmp 0x0000:0x7c00,接着跳转到了引导扇区的代码去执行。
在我们的代码中boot loader 由两个文件组合而成,分别是./boot/boot.S和./boot/main.c,boot loader主要完成下面两个工作:
- Boot loader将处理器从实模式切换到保护模式,因为在实模式之下处理器只能访问0-1MB的内存,切换到保护模式才可以访问更大的内存。
- 接下来boot loader会通过汇编指令从硬盘当中将kernel读入到内存当中。
继续跟踪
x/20i 0x7c00
得到
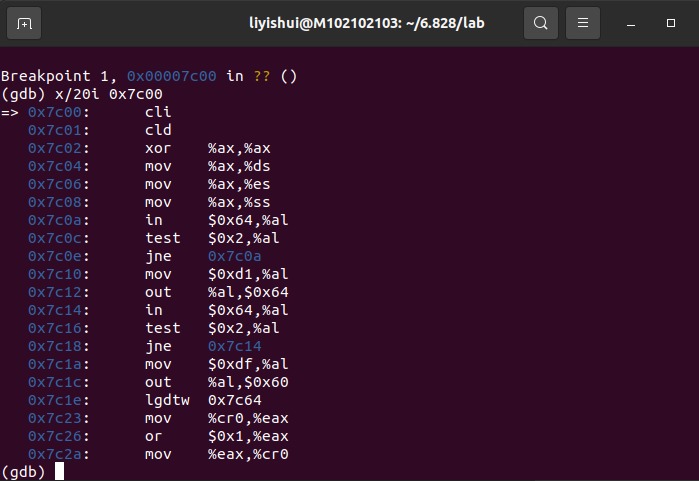
这些将要执行的代码来自6.828/lab/boot/boot.s文件,现贴出该文件的部分内容和注释。
将从以下几部分分析boot.s代码:初始化段寄存器、打开A20门、从实模式跳到虚模式(需要设置GDT和cr0寄存器。
初始化段寄存器
#include <inc/mmu.h>
// .set是AT&T的语法,和x86的equ是一个意思
//就是声明一些常量,在编译的时候会被直接替换为对应的值
.set PROT_MODE_CSEG, 0x8 # kernel code segment selector
.set PROT_MODE_DSEG, 0x10 # kernel data segment selector
.set CR0_PE_ON, 0x1 # protected mode enable flag
//这里的start类似于c语言里的main函数。
//cli意味着从这一刻开始你的计算机将不再响应任何中断事件(比如这时候你敲个键盘点个鼠标啥的,CPU 就不再理你了)。
//之所以要关闭中断响应是因为要保证引导代码的顺利执行(总不能执行到一半被 CPU 给中断了吧,那直接就挂了)。
//.code16 这句。这告诉 CPU 我们目前是在 16 位模式下执行代码,此时内存寻址能力只有 1MB,并且是“实模式”下。
.globl start
start:
.code16 # Assemble for 16-bit mode
cli # 清除中断标志
cld # 字符串复制的方向,递增复制
// Set up the important data segment registers (DS, ES, SS).
//初始化段寄存器(DS,ES,SS)首先,使用xorw指令将寄存器ax与自身进行异或运算,将结果存储回寄存器ax。
//这一步的目的是将寄存器ax的值清零,即将其设置为0。接下来,使用movw指令将寄存器ax的值复制到寄存器ds,
//将数据段寄存器设置为0。同样地,使用movw指令将寄存器ax的值复制到寄存器es和ss,
//将附加段寄存器和堆栈段寄存器都设置为0。
//插一句,程序中的数据还要分很多种类型,所以 CPU 针对一个程序准备了 4 个寄存器来存储他们的“段基址”。
//这 4 个寄存器分别是用于程序指令的 CS 代码段寄存器、用于程序数据的 DS 数据段寄存器、
//用于程序堆栈(也是数据的一种)的 SS 堆栈段寄存器和 ES 附加段寄存器(也是数据的一种)。
xorw %ax,%ax # Segment number zero
movw %ax,%ds # -> Data Segment
movw %ax,%es # -> Extra Segment
movw %ax,%ss # -> Stack Segment
打开A20门
//控制 A20 gate 的方法有 3 种:804x 键盘控制器法,Fast A20 法,BIOS 中断法
//因为是教学设计,就用了最古早的804x键盘控制器法
// Enable A20:
// For backwards compatibility with the earliest PCs, physical
// address line 20 is tied low, so that addresses higher than
// 1MB wrap around to zero by default. This code undoes this.
//下面是处理键盘的一些工作以及开启A20地址线
//seta20.1和seta20.2两段代码实现打开A20门的功能,其中seta20.1是向键盘控制器的0x64端口发送0xd1命令,这个命令的意思是告诉键盘控制器我要给你的p2写入数据了
//seta20.2是向键盘控制器的 P2 端口写数据了。写数据的方法是把数据通过键盘控制器的 0x60 端口写进去。写入的数据是 0xdf。
//因为 A20 gate 就包含在键盘控制器的 P2 端口中,随着 0xdf 的写入,A20 gate 就被打开了。
seta20.1:
inb $0x64,%al # Wait for not busy
testb $0x2,%al
jnz seta20.1
movb $0xd1,%al # 0xd1 -> port 0x64
outb %al,$0x64
seta20.2:
inb $0x64,%al # Wait for not busy
testb $0x2,%al
jnz seta20.2
movb $0xdf,%al # 0xdf -> port 0x60
outb %al,$0x60
从实模式切换到保护模式
// 加载GDT到gdtr寄存器,并且将cr0寄存器的最低位设置为1
// 这样就开启了保护模式
lgdt gdtdesc
movl %cr0, %eax
orl $CR0_PE_ON, %eax
movl %eax, %cr0
//跳转到保护模式下的代码去执行
ljmp $PROT_MODE_CSEG, $protcseg
.code32 # Assemble for 32-bit mode
protcseg:
// Set up the protected-mode data segment registers
movw $PROT_MODE_DSEG, %ax # Our data segment selector
movw %ax, %ds # -> DS: Data Segment
movw %ax, %es # -> ES: Extra Segment
movw %ax, %fs # -> FS
movw %ax, %gs # -> GS
movw %ax, %ss # -> SS: Stack Segment
这段代码知识密度极大,所以我把注释单独拎出来放在下面写了,并且会拆分成2个部分进行分析。
另,以下资料主要来自于: https://leenjewel.github.io/blog/2014/07/29/[(xue-xi-xv6)]-cong-shi-mo-shi-dao-bao-hu-mo-shi/ ,加入一点个人理解。
第一部分:加载GDT到gdtr寄存器
lgdt gdtdesc
首先什么是GDT?
在保护模式下,内存管理有两种方式:分页式和分段式。我们先只讨论分段式。
在分段模式下,内存被划分为很多个“片段”,程序数据以及指令就放在这些片段中,当要读取内存中具体的数据时,首先要知道这个数据在哪个“片段”里,这时段寄存器里的“段基址”指向某一个内存片段的下标,而这时的“偏移量”则相应的表示为具体的数据在它所在的内存“片段”里的偏移量。
好比你家在第三小区走进去第五栋楼,通过段基址+偏移量我们就能定位到数据的具体位置。
所以在分段模式下,内存里会有一个“表”,这个“表”里存放了每个内存“片段”的信息(如这个“片段”在内存中的地址,这个“片段”多长等),比如我们现在将内存分成 10 个片段,则这时我们有一个“表”,这个“表”有 10 项,分别存放着对这 10 个内存片段的描述信息。
这时我有个数据存放在第 5 个片段中,在第 5 个片段的第 6 个位置上,所以当我们想要读取这个数据的时候,我们的数据段寄存器里存放的“段基址”是 5 这个数,代表要去第 5 个片段上找,那第五个片段在哪里?就要问这个表,表存储着片段的位置和长度。找到了第五段以后再去找第6个位置,就能得到数据。
而要想实现在分段式保护模式下成功的寻址,操作系统需要做的就是在内存中建立这个“表”,“表”里放好内存分段的描述信息,然后把这个“表”在内存的什么位置,以及这个“表”里有多少个内存分段的描述信息告诉 CPU。
这个“表”就是GDT。
有了这些知识以后我们可以用更规范的描述来说明GDT:GDT是全局描述符表,GDTR是全局描述符表寄存器。想要在“保护模式”下对内存进行寻址就先要有 GDT,GDT表里每一项叫做“段描述符”,用来记录每个内存分段的一些属性信息(这些信息就是刚才提到的片段所在的地址和长度等),每个段描述符占8字节。
但是其实GDT本身也是一些数据,GDT要存放在哪里???
CPU使用GDTR寄存器来保存我们GDT在内存中的位置和GDT的长度。lgdt gdtdesc将源操作数的值(存储在gdtdesc地址中)加载到全局描述符表寄存器中。
GDTR 寄存器一共 48 位,其中高 32 位用来存储我们的 GDT 在内存中的位置,其余的低 16 位用来存我们的 GDT 有多少个段描述符。 16 位最大可以表示 65536 个数,这里我们把单位换成字节,而一个段描述符是 8 字节,所以 GDT 最多可以有 8192 个段描述符。不仅 CPU 用了一个单独的寄存器 GDTR 来存储我们的 GDT,而且还专门提供了一个指令用来让我们把 GDT 的地址和长度传给 GDTR 寄存器,这就是上面代码里的:
lgdt gdtdesc
gdtdesc的定义在boot.s代码底部,.long是GDT真实的物理地址,.word是GDT的长度

第二部分:通过控制cr0切换导保护模式
movl %cr0, %eax
orl $CR0_PE, %eax
movl %eax, %cr0
要进入“保护模式”我们也需要打开一个开关,这个开关叫“控制寄存器”,x86 的控制寄存器一共有 4 个分别是 CR0、CR1、CR2、CR3,而控制进入“保护模式”的开关在 CR0 上,这四个寄存器都是 32 位的,我们看一下 CR0 上和保护模式有关的位

- PG:为 0 时代表只使用分段式,不使用分页式;为 1 是启用分页式
- PE:为 0 时代表关闭保护模式,为 1 则开启保护模式
那么这三行代码的意思就是:
- 用通用寄存器 eax 来保存 cr0 寄存器的
- 然后 CR0_PE 这个宏的定义在 mmu.h 文件中,是个数值 0x00000001,将这个数值与 eax 中的 cr0 寄存器的值做“或”运算后,就保证将 cr0 的第 0 位设置成了 1 即 PE = 1 保证打开了保护模式的开关
- 将新的计算后的 eax 寄存器中的值写回到 cr0 寄存器中就完成了到保护模式的切换
32位的时代!!预备,跳
ljmp $PROT_MODE_CSEG, $protcseg
.code32 # Assemble for 32-bit mode
protcseg:
// Set up the protected-mode data segment registers
movw $PROT_MODE_DSEG, %ax # Our data segment selector
movw %ax, %ds # -> DS: Data Segment
movw %ax, %es # -> ES: Extra Segment
movw %ax, %fs # -> FS
movw %ax, %gs # -> GS
movw %ax, %ss # -> SS: Stack Segment
.set PROT_MODE_CSEG, 0x8 这句已经定义了PROT_MODE_CSEG是一个常量0x8,$protcseg则在下面给出了定义。也就是说,protcseg是一个标签(label),用于标识一个代码段的起始位置。它并不是一个跳转目标,而是一个可以在代码中被引用的标记。
这些mov语句先把PROT_MODE_DSEG的值搬到ax上,再把ax上的该值搬运到DS/ES/FS/GS/SS上。
PROT_MODE_DSEG的定义在boot.s的开头定义过了,是一个常量0x10。
.set PROT_MODE_DSEG, 0x10
这里没找到很详细的资料,这些movw语句应该是在做一些初始化的部分
调用bootmain函数,进入c语言的时代
// Set up the stack pointer and call into C.
movl $start, %esp
call bootmain
到这里,就开始加载bootmain函数了。