步进电机
学习资料:
步进电机的介绍
步进电机又称为脉冲电机,是一种将电脉冲信号转换成相应的角位移或线位移的电动机。
- 每输入一个脉冲信号,转子就转动一个角度或前进一步
- 其输出的角位移或线位移与输入的脉冲数成正比
- 转速与脉冲频率成正比
从控制芯片来看(STM32芯片)上面的话:
- 假如使用TIM输出比较中的PWM1向上计数模式,输出1个PWM波--脉冲信号-->转子转动一个角度
- 输入脉冲的数量 --> 一共输入多少个PWM波形 --> 计数器CNT从0加到重装栽植ARR(一个周期) == 一个PWM波形 --> 转子的角位移
- 单位时间输入脉冲的数量:
- 500HZ --(1s发送500个脉冲) 2ms一个周期1个脉冲 快
- 50HZ -- (1s发送50个脉冲) 20ms一个周期1个脉冲 慢
步进电机的单极性和双极性
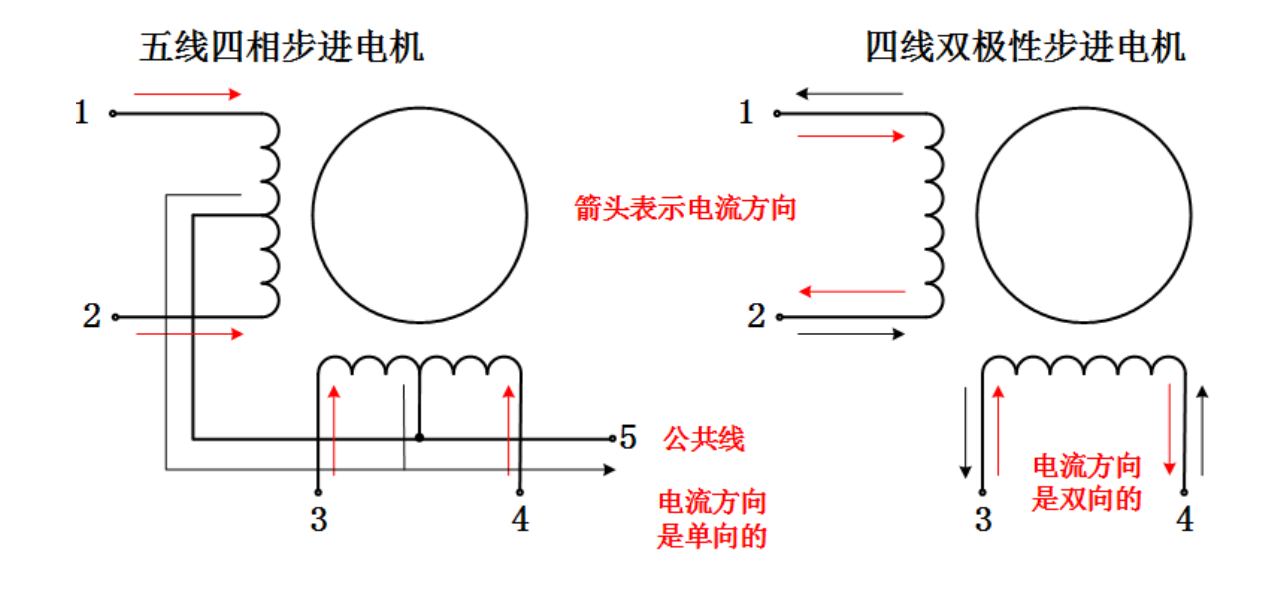
单极性步进电机
五线四相单极性: A、B、C、D四相,共阳极
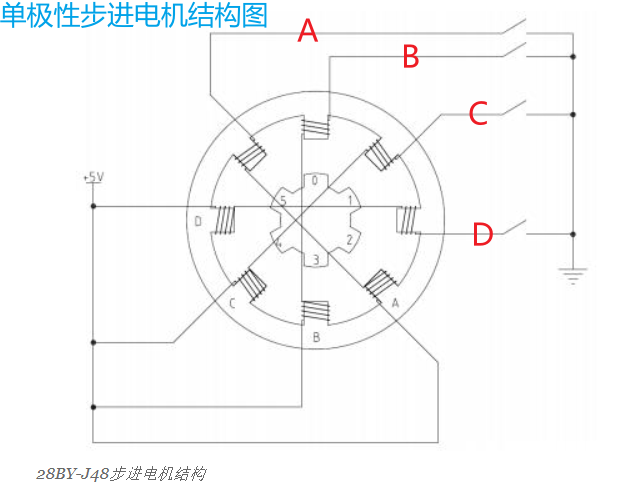
在图示中分为 5 根线,分别为 A、B、C、D 和公 共端(+),公共端需要一直通电,剩下 ABCD 相中只要有一个相通电,即可形成回路产生磁场, 图中的通电顺序为A- >AB->B->BC->C->CD->D->DA,即可完成上图中的顺时针旋转,如果想要逆时针旋转只需要将 其倒序即可
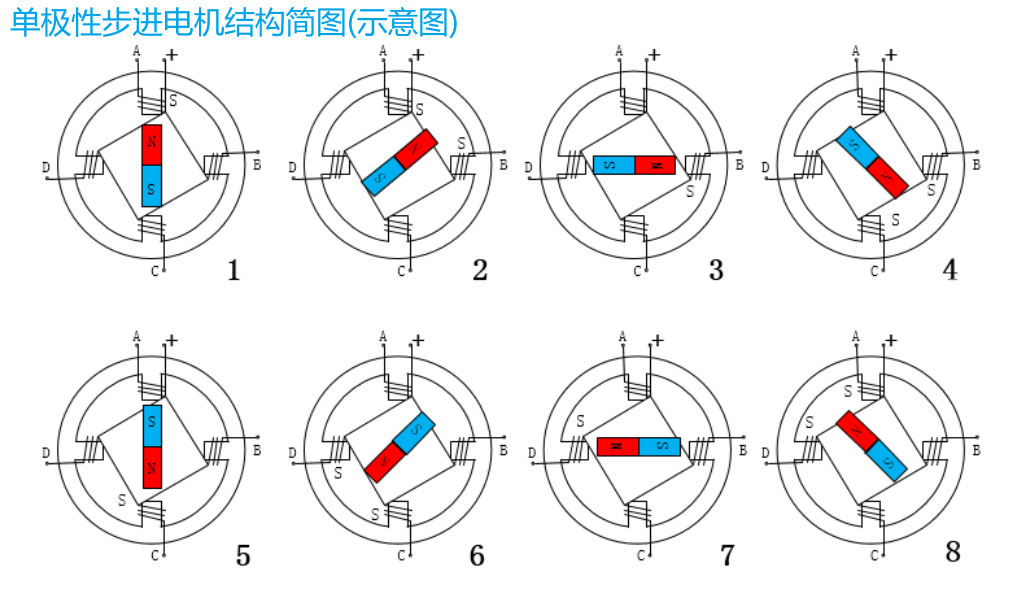
双极性步进电机
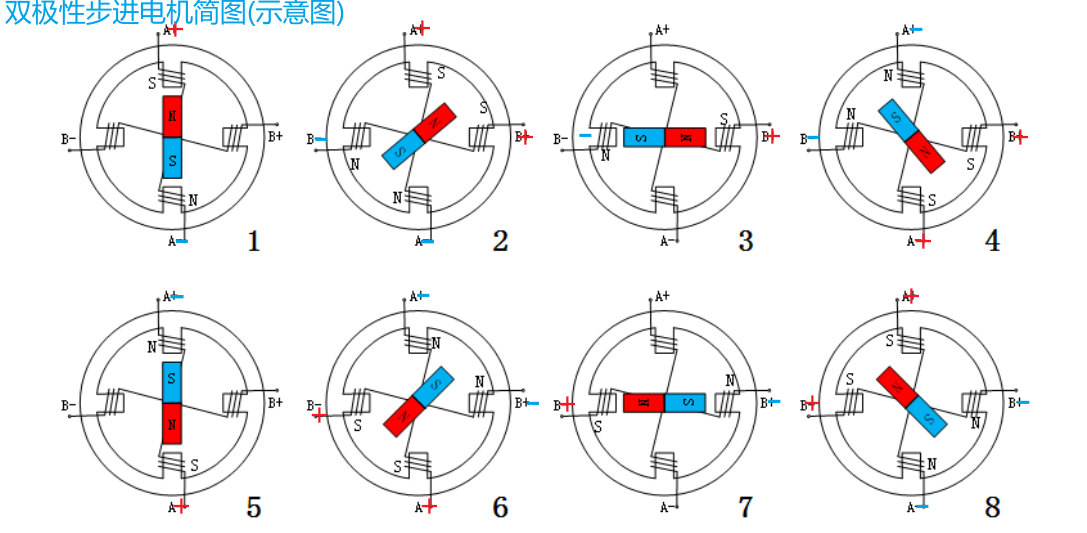
- A 相通电,B 相不通电
- A、B 相全部通电,且电流相同,产生相同磁性
- B 相通电,A 断电
- B 相通电,A 相通电,且电流相等,产生相同磁性
- A 相通电,B 断电
- A、B 相全部通电,且电流相同,产生相同磁性
- B 相通电,A 断电
- B 相通电,A 相通电,且电流相等,产生相同磁性
其中 1~4 步与 5~8 步的电流方向相反(电流相反,电磁的极性就相反)
步进电机的一些专业词
-
相数:产生不同对极 N、S 磁场的激磁线圈对数,也可以理解为步进电机中线圈的组数,其中两相步进电机步距角为 1.8°,三相的步进电机步距角为 1.5°,相数越多的步进电机,其步距角就越小。
-
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用 n 表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即 AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
-
步距角:一个脉冲信号所对应的电机转动的角度,可以简单理解为一个脉冲信号驱动的角度,电机上都有写,一般 42 步进电机的步距角为 1.8°
-
定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)。
-
静转矩:电机在额定静态电压作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力 矩是衡量电机体积的标准,与驱动电压及驱动电源等无关。
-
步距角精度:步进电机转动一个步距角度的理论值与实际值的误差。用百分比表示:误差/步 距角 *100%。
-
失步:电机运转时运转的步数,不等于理论上的步数。也可以叫做丢步,一般都是因负载太大或者是频率过快。
-
失调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误 差,采用细分驱动是不能解决的。
-
最大空载起动频率:在不加负载的情况下,能够直接起动的最大频率。
-
最大空载的运行频率:电机不带负载的最高转速频率。
-
运行转矩特性:电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流 越大,电机输出力矩越大,即电机的频率特性越硬。
-
电机正反转控制:通过改变通电顺序而改变电机的正反转。
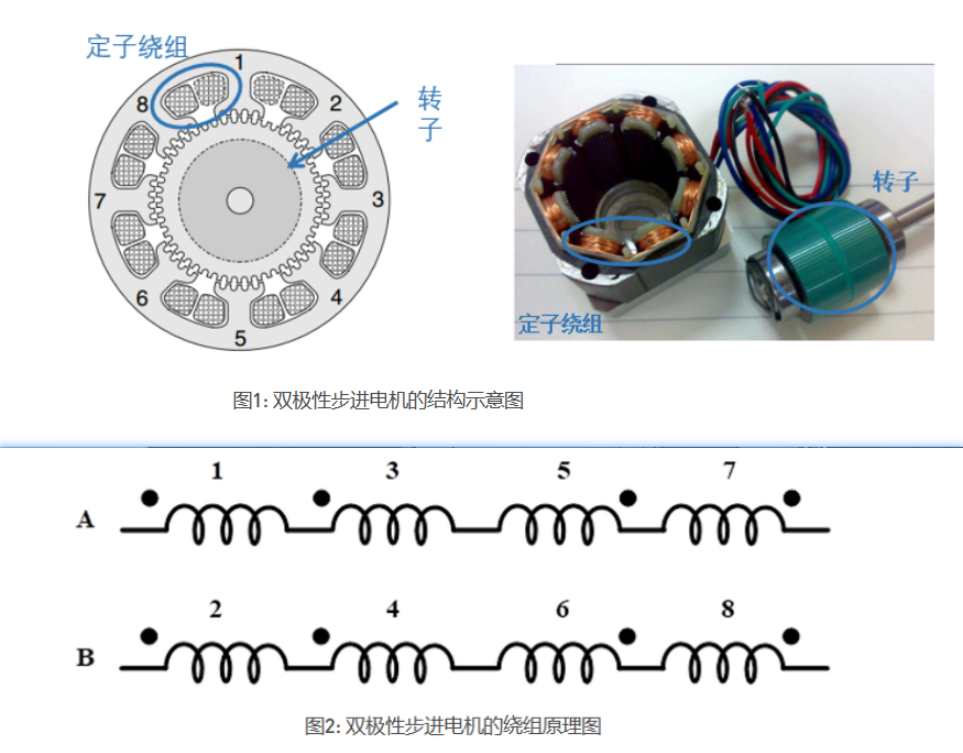
步进电机的进一步认知
从上面学习来看,我们实现一次的转动角度最小是45度,但是如果我们想实现更小的转动角度,那么如何实现呢,一般最先想到的是增加相数对吧,这最好理解了,但是呢没有采用说明复杂度太大?我后
原来是:人们是通过设计机械结构来决定的 --> 在上面的示意图中,转子是由一根磁体,有N,S两级,步距角是45度,于是人们把转子改成一个拥有50个齿轮的全S极,然后设置定子的轮齿是48个
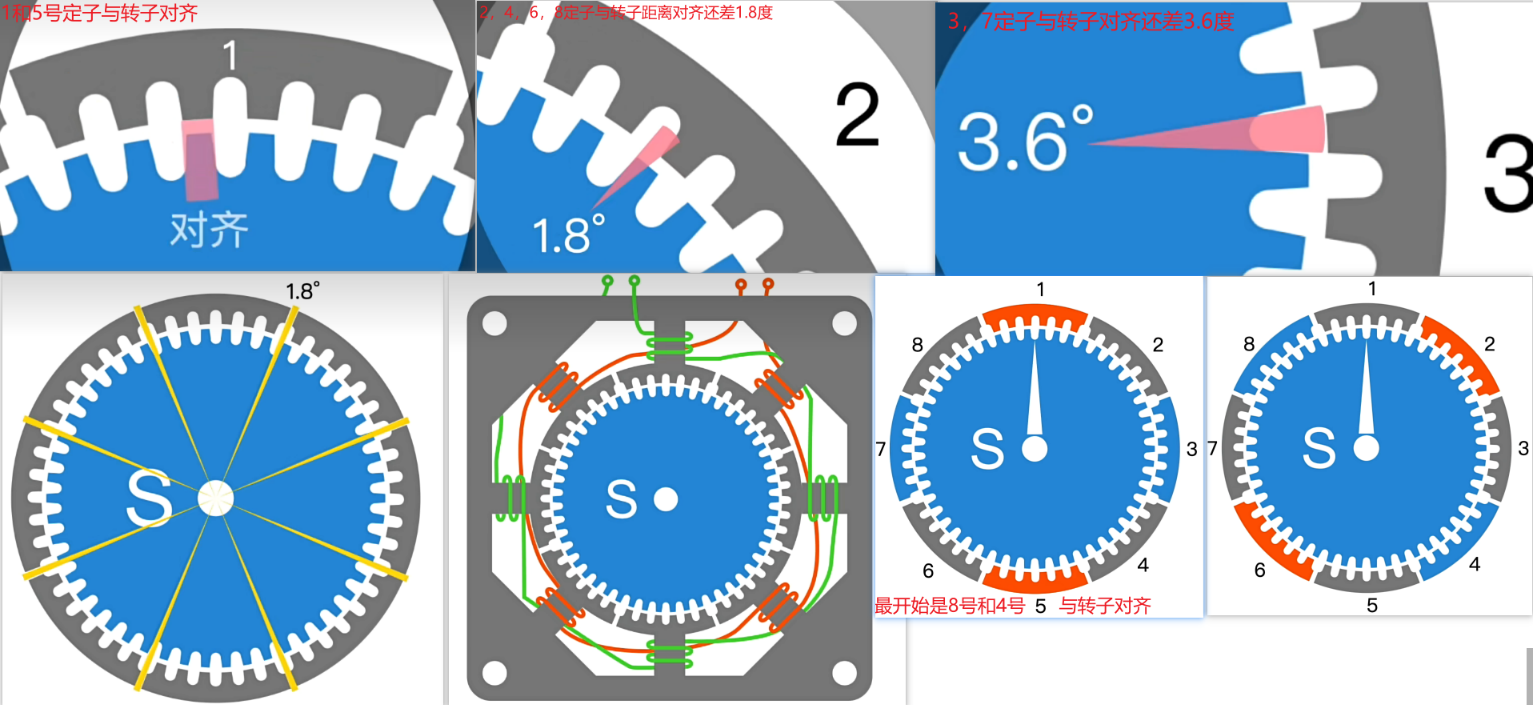
这样以 单相步进 完成一个 4拍数 --> A-B-\(\overline A\)-\(\overline B\) 前进了7.2度,一个脉冲信号所对应的电机转动的角度-->步距角1.8度
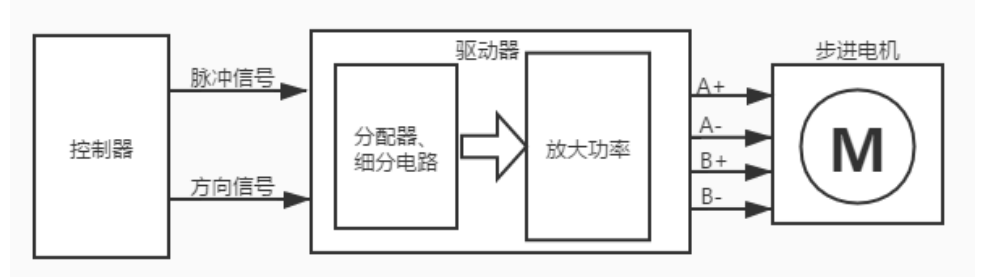
步进电机驱动器
为什么要使用驱动器 -- 因为驱动器起到将控制器信号放大或者转换的作用
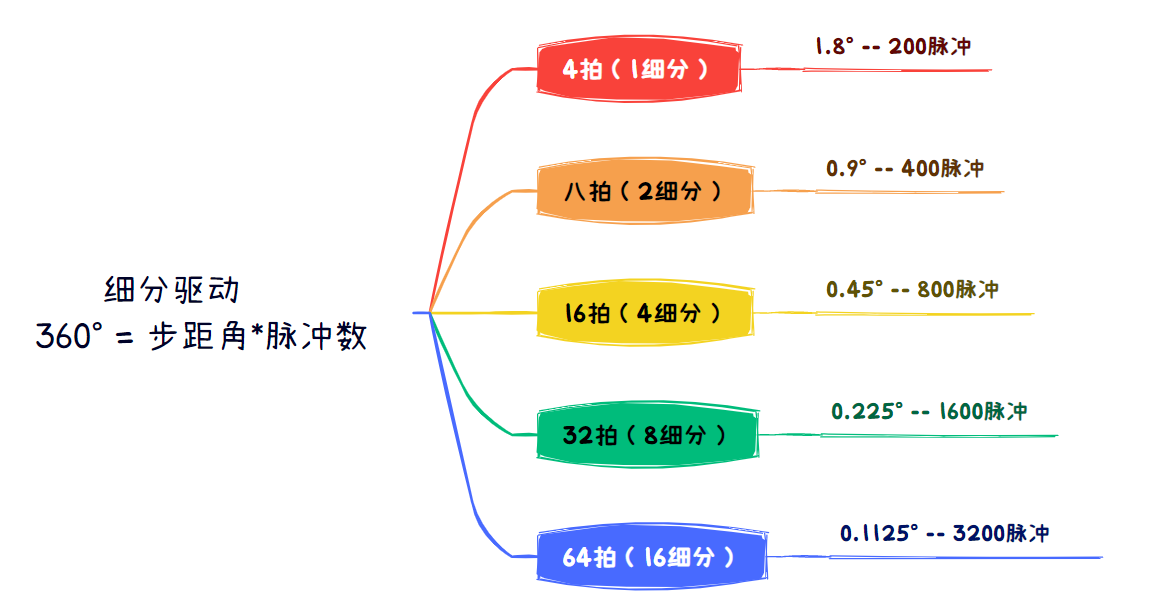
细分器驱动原理
细分的原理就是:通过改变定子的电流比例,改变转子在一个整步中的不同位置,可以将一个整步分成多个小步来运行。
驱动器的细分设置由拨码开关的 SW1~SW3 来设定,默认为 2 细分,一般的两相四线(A+、B+、A-、B-)制步进电机的步进角都是1.8°,因此电机旋转一圈需要 360° /1.8° =200 个脉冲,这里 2 细分转一圈需要200*2=400 个脉冲。
STM32--步进电机实战演习
由以上学习可知,我们使用MCU--STM32控制步进电机,只需要给它两个控制信号,1个是方向信号,一个是脉冲信号
StepMotor.h
#ifndef __STEPMOTOR_H__//如果没有定义了则参加以下编译
#define __STEPMOTOR_H__//一旦定义就有了定义 所以 其目的就是防止模块重复编译
#include "stm32f10x.h"
typedef struct{
u32 subdiv; //细分值
float speed; //速度
float angle; //当前角度
float targetangel; //目标角度
float pulseangle; //单脉冲的角度
}STEPMOTOR_TypeDef;
typedef enum{
DIR_LEFT=0,
DIR_RIGHT,
}STEPDIR_Def;
#define STEPDIRGET() (GPIOB->ODR & (1<<5)) //如果PB5输出是1 与1得1 右转 -- 输出0 与0得0 左转
#define STEPDIR(x) x?(GPIOB->ODR |= (1<<5)):(GPIOB->ODR &=~ (1<<5))//x=1 或1得1 ; x=0 与0得0
void StepMotor_Init (void);
void StepMontor_Move (float angle);
void StepMontor_Stop (void);
void StepMotor_SetSpeed(float angle);
u8 Step_MoveCheck(void);
#endif //结束编译
StepMotor.c
#include "StepMotor.h"
STEPMOTOR_TypeDef stepmotor = {1600,0,0,0,0};//初始化结构体
/**
* @brief StepMotor_Init()电机初始化函数
PB5 --> DIR+方向
PB6 --> PUL+脉冲
标志脉冲是方波 所以占空比=50%
* @param 无
* @retval 无
*/
void StepMotor_Init(void)
{
//1.开启时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);//开启定时器4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//开启GPIOB时钟
//2.初始化IO口
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;//TIM4的PWM的OC1通道输出在PB6引脚 -- 看引脚手册
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP ;//设置为复用推挽输出 -- 使用片上外设输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ
GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ;//设置为推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ
GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化
//3.初始化TIM定时器
TIM_InternalClockConfig(TIM4); //设置TIM4使用内部时钟 -- 可不写 原因--STM32默认使用内部时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //定义定时器初始化结构体
//CK_CNT_OV = CK_PSC / (PSC + 1) / (ARR + 1) 通过这个公式可得出 设置500HZ频率 每2ms加一,72000000/72/2000
TIM_TimeBaseStructure.TIM_Period = 2000-1; //自动重装载寄存器周期的值 -- ARR
TIM_TimeBaseStructure.TIM_Prescaler = 72 - 1; //预分频值 -- PSC
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //滤波频率 1分频 也就是 不分频 使用系统时钟频率
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0; //重复计数器只要高级定时器才有 --TIM1/TIM8
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //定时器模式 -- 向上计数
TIM_TimeBaseInit(TIM4, & TIM_TimeBaseStructure);//初始化定时器4
//4.初始化输出比较 -->PWM1模式
/* Configures the TIM4 OC1 in PWM1 Mode */
TIM_OCInitTypeDef TIM_OCInitStructure; //定义结构体
/*
*因为 我们只需要给下面部分结构体成员设置初始值,而结构体里面的成员有些没有使用到(比如高级定时器的部分),导致一些不确定的因素
*所以 为了避免这些不确定的因素 我们使用TIM_OCStructInit函数 设置默认值
*/
TIM_OCStructInit(& TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置输出模式
/*
* TIM_OCPolarity_High , 高极性 极性不翻转 REF波形直接输出 高电平 (有效电平)
* TIM_OCPolarity_Low , 低极性,极性不翻转 REF波形直接输出 低电平 (有效电平)
*
*/
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置输出比较模式的极性
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//设置输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置CCR --> 占空比
TIM_OC1Init(TIM4, & TIM_OCInitStructure); //选择TIM4 的 OC1通道 输出PWM波形 使用引脚手册查看输出到那个引脚上了 -- 这里是OC2 == CH2通道
//5. 启动预装载寄存器 --> 写入的值不会立即生效而是更新事件时生效 --> 避免一些小问题
TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM4, ENABLE);
TIM_SetCompare1(TIM4, 1000-1);/*单独更改TIM4_CCR1寄存器值的函数 --> 修改占空比50%*/
//6.初始化步进电机速度
StepMotor_SetSpeed(50);//初始速度为50°/s
StepMontor_Stop();//防止步进电机动
TIM_ClearFlag(TIM4, TIM_FLAG_Update);//清除中断状态标志位
//7.配置中断输出控制函数
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE ); //TIM2配置中断输出控制 -- 更新中断
//8.初始化外部中断函数
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //根据上面的我们所选取的是定时器2 -- 在中断通道的TIM2 所以这里选择 TIM2_IRQn
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;//这里选择的是抢占 2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //这里选择的是响应1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能指定的中断通道
//初始化函数↓
NVIC_Init(&NVIC_InitStructure);
//TIM_Cmd(TIM4, ENABLE); //使能定时器4 -- 一开始并不初始化TIM4 因为一使能 一有脉冲数 电机就开始运动了 所以什么时候使用 什么时候使能 在不使用电机时 失能TIM4
}
/**
* @brief 让步进电机旋转到指定角度 -- > 上电后默认初始时刻的角度为0°
* @param angle 被设置的角度值
* @retval None
*/
void StepMontor_Move (float angle)
{
stepmotor.targetangel = angle;//更新目标值
float difvalue = stepmotor.angle - stepmotor.targetangel;//差度值 = 当前角度 - 目标角度
if(difvalue < -stepmotor.pulseangle || difvalue > stepmotor.pulseangle)// 差度值的绝对值 必须大于 单脉冲的角度
{
/*目标角度 > 0 且 差度值 < 0 ==> 向右转 (举例:当前的角度10° 目标角度15° 差度值 = -5°)*/
if(angle > 0 && difvalue < 0)
STEPDIR(DIR_RIGHT);
/*目标角度 >= 0 且 差度值 > 0 ==> 向左转 (举例:当前的角度10° 目标角度5° 差度值 = 5°)*/
if((angle > 0 || angle == 0) && difvalue > 0)
STEPDIR(DIR_LEFT);
/*目标角度 <= 0 且 差度值 > 0 ==> 向右转 (举例:当前的角度-10° 目标角度-5° 差度值 =-5°)*/
if((angle < 0 || angle == 0) && difvalue < 0)
STEPDIR(DIR_RIGHT);
/*目标角度 < 0 且 差度值 > 0 ==> 向左转 (举例:当前的角度-10° 目标角度-15° 差度值 = 5°)*/
if(angle < 0 && difvalue > 0)
STEPDIR(DIR_LEFT);
TIM_Cmd(TIM4, ENABLE);//使能定时器
}
else
TIM_Cmd(TIM4, DISABLE);
}
/**
* @brief 判断步进电机是否移动到位
* @param
* @retval
*/
u8 Step_MoveCheck(void)
{
float difvalue = stepmotor.angle - stepmotor.targetangel;
if(difvalue < -stepmotor.pulseangle || difvalue > stepmotor.pulseangle)
return 0;//没有移动到位
else
return 1;//移动到位
}
/**
* @brief 失能步进电机 -- 停止
* @param
* @retval
*/
void StepMontor_Stop (void)
{
TIM_Cmd(TIM4, DISABLE);
}
/********************************************
设置: 步进电机的旋转速度
解释: 发送脉冲的频率是由ARR和PSC决定的 角速度设置为每秒转多少度 - angle °/s 1个脉冲转 步进角(0.225°)
1s多少个脉冲 ==> 频率HZ ==> 7200000/PSC+1/ARR+1
频率HZ = angle / 步进角(单脉冲的角度) ==> 1s有多少个脉冲
步进角 * 频率HZ(单位1/s) = 每1s转多少度
传参:angle °/s
*********************************************/
void StepMotor_SetSpeed(float angle)
{
stepmotor.pulseangle = 360.0 / stepmotor.subdiv;//根据细分--求出单脉冲的角度 也就是步进角的度数 1600 - 0.225°
stepmotor.speed = angle;//更新目标速度值
/*根据速度求每秒钟的脉冲数 = 每秒钟的角度 / 单脉冲角度*/
float pulsenum = angle / stepmotor.pulseangle + 0.5;//
if(pulsenum < 0.16)
{
//如果每秒钟脉冲数小于0.16个,则设置速度为每秒0.16个脉冲 -- 连一个脉冲都不到
TIM4->PSC = 7200 - 1;
TIM_SetAutoreload(TIM4, 65535);
TIM_SetCompare1(TIM4, 32768);
}
else if(pulsenum < 16)
{
//如果脉冲给的速度比 65.536ms 慢,那么我们可以重新修改分频值
TIM4->PSC = 7200 - 1;
TIM_SetAutoreload(TIM4, 10000.0f/pulsenum);
TIM_SetCompare1(TIM4, 10000.0f/pulsenum/2);
}
else
{
//在1us一次的计数速率下,1s内的脉冲个数最快1us一次,最慢65.536ms一次
TIM4->PSC = 72 - 1;//72分频,1us计数一下
TIM_SetAutoreload(TIM4, 1000000.0f/pulsenum);
TIM_SetCompare1(TIM4, 1000000.0f/pulsenum/2);
}
}
//中断服务函数
//执行步进电机的旋转和停止
void TIM4_IRQHandler (void)
{
TIM_ClearFlag(TIM4, TIM_FLAG_Update);//清除中断标志位
if (STEPDIRGET())//判断 是左转还是右转
stepmotor.angle += stepmotor.pulseangle;//右转 --> 最后得出的角度值 = 之前角度值 + 单脉冲的角度值
else
stepmotor.angle -= stepmotor.pulseangle;//右转 --> 最后得出的角度值 = 之前角度值 - 单脉冲的角度值
/*差度值 = 当前角度 - 目标角度*/
float difvalue = stepmotor.angle - stepmotor.targetangel;
/*检测当前角度与目标角度差值,误差在一个±步进角度之间则表示角度一致,关闭定时器*/
if(difvalue < -stepmotor.pulseangle || difvalue > stepmotor.pulseangle)
TIM_Cmd(TIM4, ENABLE);//差度值的绝对值 必须大于 单脉冲的角度==步进角 才会继续打开定时器4
else
TIM_Cmd(TIM4, DISABLE);
}