一、步进电机的介绍
17HS4401步进电机是一种步进电机,也称为双级四相混合式步进电机。它是一种旋转电机,可以控制旋转角度和速度,17HS4401步进电机通常被应用于一些需要精准控制转动的场合,例如打印机、CNC机床等。
参数:
1.步距角度: 1.8度
2.驱动方式: 双级四相混合式
3.工作电压: 12V
4.额定电流: 1.7A
5.静态转矩: 40N.cm
6.旋转方向: 正/反时针
7.立柱长度: 28mm
8.电机长度: 40mm
9.输出轴径: 5mm
二、步进电机的原理及工作方式
原理:
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。
三、电机驱动板
在实验中电机不需要多高的电流 建议调到最小否则电机发烫严重

四、接线方式
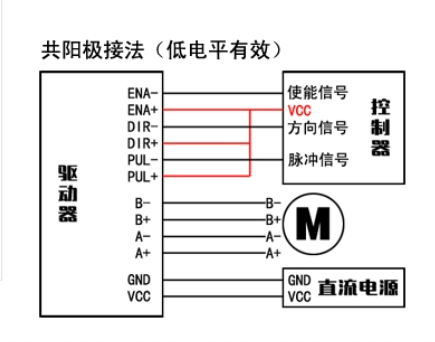
PC0 ENA
PC1 DIR
PUL PUL
四、代码驱动
1.配置GPIO
void Driver_Init(void) //pc0 ena pc1 dir { GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE); //使能PC端口时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_2; //PC0.2 端口配置 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz GPIO_Init(GPIOC, &GPIO_InitStructure); //根据设定参数初始化GPIOC GPIO_SetBits(GPIOC,GPIO_Pin_2); //PC0输出高 顺时针方向 DRIVER_DIR GPIO_ResetBits(GPIOC,GPIO_Pin_0); //PC2输出低 使能输出 DRIVER_OE }
2.定时器初始化
根据单片机的引脚复用功能找到对应的通道
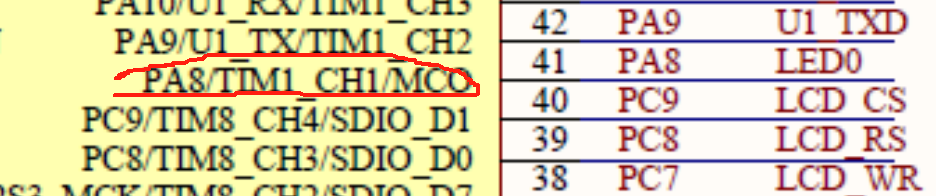
void TIM1_PWM_Init(u16 arr,u16 psc) { GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能 //设置该引脚为复用输出功能,输出TIM1 CH1的PWM脉冲波形 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //TIM_CH1 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80K TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能 TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高 TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能 TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH1预装载使能 TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器 TIM_Cmd(TIM1, ENABLE); //使能TIM8 }
3.按键初始化
系统自带 拿来直接用就好了
void KEY_Init(void) { GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOC,ENABLE);//使能PORTA,PORTC时钟 GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);//关闭jtag,使能SWD,可以用SWD模式调试 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;//PA15 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入 GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA15 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;//PC5 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入 GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化GPIOC5 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//PA0 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0设置成输入,默认下拉 GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.0 } //按键处理函数 //返回按键值 //mode:0,不支持连续按;1,支持连续按; //返回值: //0,没有任何按键按下 //KEY0_PRES,KEY0按下 //KEY1_PRES,KEY1按下 //WKUP_PRES,WK_UP按下 //注意此函数有响应优先级,KEY0>KEY1>WK_UP!! u8 KEY_Scan(u8 mode) { static u8 key_up=1;//按键按松开标志 if(mode)key_up=1; //支持连按 if(key_up&&(KEY0==0||KEY1==0||WK_UP==1)) { delay_ms(10);//去抖动 key_up=0; if(KEY0==0)return KEY0_PRES; else if(KEY1==0)return KEY1_PRES; else if(WK_UP==1)return WKUP_PRES; }else if(KEY0==1&&KEY1==1&&WK_UP==0)key_up=1; return 0;// 无按键按下 }
4.主函数
#include "led.h" #include "delay.h" #include "sys.h" #include "pwm.h" #include "key.h" //ALIENTEK Mini STM32开发板范例代码8 //PWM输出实验 //技术支持:www.openedv.com //广州市星翼电子科技有限公司 uint8_t KeyNum; //定义用于接收按键键码的变量 int main(void) { u8 key=0 ; KEY_Init(); delay_init(); //延时函数初始化 LED_Init(); Driver_Init(); //初始化与LED连接的硬件接口 TIM1_PWM_Init(999,71);//1K频率 TIM_SetCompare1(TIM1,500);//占空比50% while(1) { KeyNum=KEY_Scan(1); if(KeyNum==KEY0_PRES) { delay_ms(20); while((KeyNum==KEY0_PRES)==0); ENA=1; DIR=!DIR ; delay_ms(1000); } if(KeyNum==KEY1_PRES) { delay_ms(20); while((KeyNum==KEY1_PRES)==0); ENA=!ENA; delay_ms(1000); } LED1=!LED1; delay_ms(1000); } }