yolov5内存分布分析
Transpose输出分析
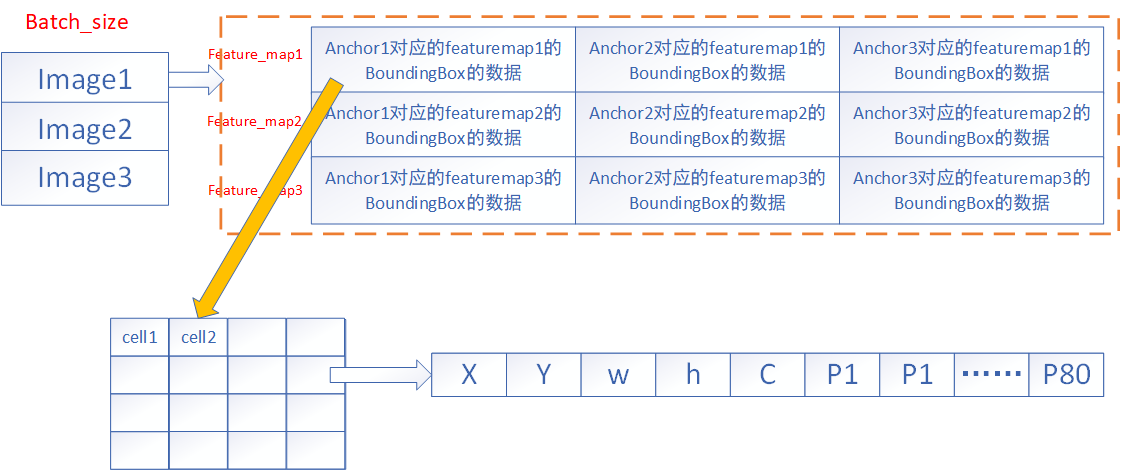
假设batch_size为1,yolov5有三个输出,shape分别是:
- (1,3,80,80,85)
- (1,3,40,40,85)
- (1,3,20,20,85)
其中3代表anchor数量,20*20代表feature_map大小,85代表boundbox的(x,y,w,h,c+80个类别的概率)
其中(x,y,w,h,c+80个类别的概率)在内存中是连续分布的,即:

(1,3,20,20,85)整个数组在内存分布中也是连续分布的,
- (0,0,0,0,0)->x->第一个anchor在第一个cell对应的boundingbox的x
- (0,0,0,0,1)->y->第一个anchor在第一个cell对应的boundingbox的y
- (0,0,0,0,2)->w->第一个anchor在第一个cell对应的boundingbox的w
- (0,0,0,0,3)->h->第一个anchor在第一个cell对应的boundingbox的h
- ......
- (0,0,0,1,0)->x->第一个anchor在第二个cell对应的boundingbox的x
- (0,0,0,1,1)->y->第一个anchor在第二个cell对应的boundingbox的y
- (0,0,0,1,2)->w->第一个anchor在第二个cell对应的boundingbox的w
- (0,0,0,1,3)->h->第一个anchor在第二个cell对应的boundingbox的h
- ......
- (0,1,0,0,0)->x->第二个anchor在第一个cell对应的boundingbox的x
- (0,1,0,0,1)->y->第二个anchor在第一个cell对应的boundingbox的y
- (0,1,0,0,2)->w->第二个anchor在第一个cell对应的boundingbox的w
- (0,1,0,0,3)->h->第二个anchor在第一个cell对应的boundingbox的h
即:
后处理代码分析
# 从第一个anchor开始获取
for (int q = 0; q < num_anchors; q++)
{
const float anchor_w = anchors[q * 2];
const float anchor_h = anchors[q * 2 + 1];
const ncnn::Mat feat = feat_blob.channel(q);
#从第一个cell开始获取
for (int i = 0; i < num_grid_y; i++)
{
for (int j = 0; j < num_grid_x; j++)
{
const float* featptr = feat.row(i * num_grid_x + j);
#第5个是box_confidence值,需要使用sigmoid函数求值
float box_confidence = sigmoid(featptr[4]);
if (box_confidence >= prob_threshold)
{
# 之所以这么写是因为可以减少sigmoid(class_score)的次数,sigmoid较为耗时
#find class index with max class score
int class_index = 0;
float class_score = -FLT_MAX;
for (int k = 0; k < num_class; k++)
{
# box_confidence之后是每个类别的概率
float score = featptr[5 + k];
if (score > class_score)
{
class_index = k;
class_score = score;
}
}
#论文规定
float confidence = box_confidence * sigmoid(class_score);
if (confidence >= prob_threshold)
{
# 依次获取x,y,w,h
float dx = sigmoid(featptr[0]);
float dy = sigmoid(featptr[1]);
float dw = sigmoid(featptr[2]);
float dh = sigmoid(featptr[3]);
# 其余部分省略,可以参考ncnn代码
.......
}
}
}
}
}
====================================================================================
Conv输出分析
NPU对算法进行加速处理时,shape算子,如reshape、transpose通常不支持加速,有两种解决方法,
- 使用C/C++语言重新实现reshape、transpose算子功能,使用CPU进行处理(待完善)
- 直接按照conv层的输出内存分布获取数据进行处理
假设batch_size为1,卷积层的输出shape为:
- (1,255,80,80)
- (1,255,40,40)
- (1,255,20,20)
其中255表示3*85,3代表anchor数量,,85代表boundbox的(x,y,w,h,c+80个类别的概率),20x20代表feature_map大小。
其中(x,y,w,h,c+80个类别的概率)在内存中是连续分布的,即:

(1,255,20,20)整个数组在内存分布中也是连续分布的,
-
(0,0,0,0)->x->第一个anchor在第一个cell对应的boundingbox的x
-
(0,0,0,1)->x->第一个anchor在第二个cell对应的boundingbox的x
-
(0,0,0,2)->x->第一个anchor在第三个cell对应的boundingbox的x
-
......
-
(0,1,0,0)->x->第一个anchor在第一个cell对应的boundingbox的y
-
(0,1,0,1)->x->第一个anchor在第二个cell对应的boundingbox的y
-
(0,1,0,2)->x->第一个anchor在第三个cell对应的boundingbox的y
-
......
-
(0,85,0,0)->x->第一个anchor在第一个cell对应的boundingbox的y
-
(0,85,0,1)->x->第二个anchor在第二个cell对应的boundingbox的y
-
(0,85,0,2)->x->第二个anchor在第三个cell对应的boundingbox的y
-
....
即:

后处理代码分析
# 从第一个cell开始
for(int shiftY = 0; shiftY < gridY; shiftY++)
{
for(int shiftX = 0; shiftX < gridX; shiftX++)
{
# 从第一个anchor开始
for(int i = 0; i < 3; i++)
{
pRecord = pMatData[i];
# 获取当前cell
int pindex = shiftY* gridX + shiftX;
# coordindex的坐标对应x
int coordindex = pindex;
# 指针移动到y
pindex = pindex + gridX * gridY;
# 指针移动到w
pindex = pindex + gridX * gridY;
# 指针移动到h
pindex = pindex + gridX * gridY;
# 指针移动到C
pindex = pindex + gridX * gridY;
# 获取C的值
float precord4 = sigmoid(pRecord[pindex]);
# 指针移动到P
pindex = pindex + gridX * gridY ;
for (cls = 0; cls < classNum; cls++)
{
#获取P的值
float precord5 = sigmoid(pRecord[pindex]);
#指针移动到P1
pindex = pindex + gridX * gridY;
score = precord5 * precord4;
if (score > gYolov7Para.confidenceThreshold)
{//大于设置的阈值
# 获取x
float precord0 = sigmoid(pRecord[coordindex]);
coordindex = coordindex + gridX * gridY;
# 获取y
float precord1 = sigmoid(pRecord[coordindex]);
coordindex = coordindex + gridX * gridY;
# 获取w
float precord2 = sigmoid(pRecord[coordindex]);
coordindex = coordindex + gridX * gridY;
# 获取h
float precord3 = sigmoid(pRecord[coordindex]);
coordindex = coordindex + gridX * gridY;
# 其余部分省略
.......
}
}
}
}
}