晶圆寻边器采用线阵CCD传感器,吸盘带动晶圆转动一周,传感器采集到的数据为正弦波形。

数据采集数学模型
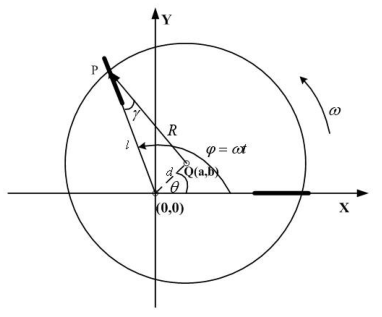
根据运动的相对性,CCD 传感器可以看成是反方向绕旋转中心运动。如下图所示,坐标系建立在旋转中心,初始时刻硅片圆心的位置在Q(a,b)处, 到旋转中心距离为d。 CCD传感器位于X轴上;在时刻t,CCD传感器到达P点,P点距旋转中心为,此时的转角为。圆拟合的目标,通过CCD传感器采样数据![]() ,i=1,2,...,N(其中N为总采样点数)计算出晶圆的极坐标
,i=1,2,...,N(其中N为总采样点数)计算出晶圆的极坐标![]() 。[1] 乔遂龙. 嵌入式晶圆预对准控制系统的研究[D]. 哈尔滨工业大学, 2009.
。[1] 乔遂龙. 嵌入式晶圆预对准控制系统的研究[D]. 哈尔滨工业大学, 2009.
晶圆检测的数学模型
晶圆的圆心拟合有多种方法,大多采用最小二乘法,计算量大。本人提出新的算法,当CCD检测最大值和最小值时圆心均在旋转中心和CCD连线上。如果圆心到旋转中心的距离为d,晶圆半径为R,CCD零点到旋转中心距离为k,CCD检测最大值为![]() ,CCD检测最小值为
,CCD检测最小值为![]() ,则
,则
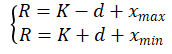
根据以上公式可知。
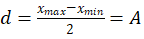
只要找出采集数据的最大值和最小值即可求出圆心的极坐标半径,考虑两点可能带来较大误差,求出正弦波的幅值即可求出圆心的极坐标半径。

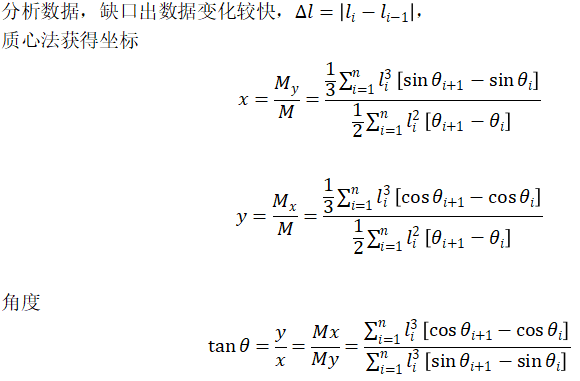
缺口检测