前言 这篇文章提出了一种用于使得 ViT 架构适配下游密集预测任务的 Adapter。简单的 ViT 模型,加上这种 Adapter 之后,下游密集预测任务的性能变强不少。本文给出的 ViT-Adapter-L 在 COCO 数据集上达到了 60.9 的 box AP 和 59.3 的 mask AP。
本文转载自极市平台
作者 | CV开发者都爱看的
仅用于学术分享,若侵权请联系删除
欢迎关注公众号CV技术指南,专注于计算机视觉的技术总结、最新技术跟踪、经典论文解读、CV招聘信息。
本文目录
1 ViT-Adapter:用于密集预测任务的视觉 Transformer Adapter
(来自南大,Shanghai AI Lab,清华)
1 ViT-Adapter 论文解读
1.1 背景和动机
1.2 ViT-Adapter 架构
1.3 空间先验模块
1.4 空间特征注入器
1.5 多尺度特征提取器
1.6 具体配置
1.7 COCO 目标检测实验结果
1.8 ADE20K 语义分割实验结果
这篇文章提出了一种用于使得 ViT 架构适配下游密集预测任务的 Adapter。简单的 ViT 模型,加上这种 Adapter 之后,下游密集预测任务的性能变强不少。
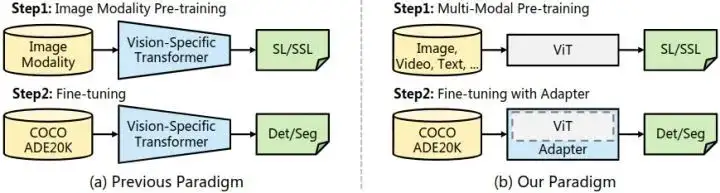
我们之前使用 Vision Transformer 做下游任务的时候,因为 ViT 缺乏局部归纳偏置,所以人们提出一些为了下游任务而设计的 ViT 替代增强版,作者称之为:Vision-Specific Transformer,比如 Swin,PVT 等等。但是,你仔细观察就会发现这些模型只是名字和 ViT 相像,但却再也不是真正的 ViT 了,或多或少都掺杂了 CNN 的影子,初心没了。
为了弥补这个遗憾,本文提出了 ViT-Adapter,只用 ViT 作为密集预测任务的基本架构,不使用任何花里胡哨的替代增强版 (Vision-Specific Transformer)。使用最原始的 ViT,就是为了利用它跨模态学习 (multi-modal pre-training) 的强大潜质。当迁移到下游的密集预测任务时,使用一个无需预训练的 Adapter 将与图像相关的归纳偏置引入 ViT,使其适合这些任务。
本文给出的 ViT-Adapter-L 在 COCO 数据集上达到了 60.9 的 box AP 和 59.3 的 mask AP。
1 ViT-Adapter:用于密集预测任务的视觉 Transformer Adapter
论文名称:Vision Transformer Adapter for Dense Predictions
论文地址:
https://arxiv.org/pdf/2205.08534.pdf
1.1 背景和动机
近年来,Transformer 模型,得益于其动态建模的能力和长程依赖性,在计算机视觉领域取得了巨大的成功。使用 Vision Transformer 做下游任务的时候,用到的模型主要分为两大类:第1种是最朴素的直筒型 ViT[1],第2种是金字塔形状的 ViT 替代增强版,比如 Swin[2],CSwin[3],PVT[4] 等。一般来说,第2种可以产生更好的结果,人们认为这些模型通过使用局部空间操作将 CNN 存在的归纳偏置引入到 ViT 结构中。但是,你仔细观察就会发现这些模型只是名字和 ViT 相像,但却再也不是真正的 ViT 了,或多或少都掺杂了 CNN 的影子,初心没了。
问:为什么希望重新研究最朴素的直筒型 ViT 呢?
答: 因为这种最朴素的结构具有一些不可忽视的优势,即:多模态预训练 (multi-modal pre-training) 方面的优势。代表性的工作有:[5][6]。朴素的直筒型 ViT 和 Transformer 架构很类似,没有输入数据的假设。普通的 ViT 可以使用大量多模态数据进行预训练,包括图像、视频和文本,这鼓励模型学习到丰富的语义表示。
但是,这种最朴素的结构由于缺乏必要的与图像相关的归纳偏置,相较于 ViT 替代增强版会导致较慢的收敛过程和较低的下游任务性能。所以,这篇文章提出了一种用于使得 ViT 架构适配下游密集预测任务的 Adapter。ViT 模型,加上这种 Adapter 之后,下游下游密集预测任务的性能变强不少,即:
朴素的 ViT + 本文的 Adapter → 更强的下游任务性能
如下图1所示,Backbone 是一个普通 ViT,不仅可以用图像,还可以用多模态数据进行预训练。使用最原始的 ViT,就是为了利用它跨模态学习 (multi-modal) 的强大潜质。当迁移到下游的密集预测任务时,使用一个无需预训练的 Adapter 将与图像相关的归纳偏置引入 ViT,使其适合这些任务。
对于密集预测任务的迁移学习,我们使用一个随机初始化的 Adapter,将与图像相关的先验知识 (归纳偏差) 引入预训练的 Backbone,使模型适合这些任务。Adapter 是一种无需预训练的附加网络,可以使得最原始的 ViT 模型适应下游密集预测任务,且无需修改 ViT 架构。这里面就需要做一件事情就是将 ViT 模型所缺乏的图像相关的先验知识引入到普通 ViT 里面。因此,作者为 ViT- adapter 设计了3个定制模块:
- 空间先验模块 (图2 (c)):用于从输入图像中捕获局部语义 (空间先验)。
- 空间特征注入器 (图2 (d)):用于将空间先验纳入 ViT。
- 多尺度特征提取器 (图2 (e)):用于重建密集预测任务所需的多尺度特征。
1.2 ViT-Adapter 架构
如下图2所示,我们的模型可以分为两部分。第一部分是普通 ViT,即图2(a)。第二部分是 ViT- adapter,即图2(b)。它包含一个空间先验模块,空间特征注入器,多尺度特征提取器。
ViT 模型用的就是最原始的 ViT[1]架构,首先将输入图片分成 16×16 大小的不重叠的 Patch。之后进行 Patch Embedding 形成特征,特征分辨率降低到原始图像的 1/16。然后加上位置编码,得到的特征通过 个 Encoder Layer 向前传播。
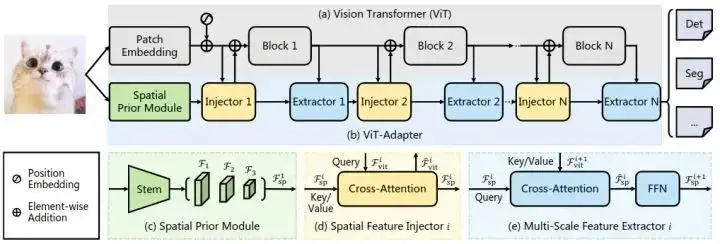
对于 ViT-Adapter,作者首先将输入图像馈送到空间先验模块,收集三种目标分辨率 (1/8、1/16、1/32) 的 维空间特征。然后,将这些特征图展平,拼接,作为特征交互的输入。
把编码器的 层分成 份, 每份是 个块。对于第 个块, 作者首先通过空间特征注入器将空间先验注入到块特征中, 然后通过多尺度特征提取器从块的输出中提取特征。经过 个特征交互, 就可以得到高质量的多尺度特征, 然后作者将特征分割 Reshape 为3个目标分辨率 和 。最后, 通过 转置卷积对 分辨率特征图进行上采样, 构建 分辨率特征图。通过这种方式, 就能够获得一个与 ResNet 分辨率相似的特征金字塔, 它可用于各种密集预测任务。
1.3 空间先验模块
卷积可以帮助 ViT 更好地捕获局部空间信息。受此启发,作者引入了空间先验模块 (Spatial Prior Module, SPM)。它可以在不改变 ViT 的原有架构的条件下建模图像的局部空间。简单来讲就是个 Stem,由3个卷积和1个 Max-Pooling 层组成。然后使用 Stride 为2 的 3×3 卷积来将通道数量增加一倍,并减少特征分辨率的大小。最后,在最后用几个 1×1 卷积将特征映射投影到 维。
这样就得到了一个包含 维特征图的特征金字塔 , 分辨率为 和 。然后, 我们将这些特征映射展平, 并且拼接为特征 , 作为特征交互的输入。
1.4 空间特征注入器
最简单的 ViT 结构由于缺乏必要的与图像相关的归纳偏置,相较于 ViT 替代增强版会导致较慢的收敛过程和较低的下游任务性能。为了缓解这一问题,作者提出了空间特征注入器 (Spatial Feature Injector) 和多尺度特征提取器 (Multi-Scale Feature Extractor)。
空间特征注入器如图2 (d) 所示, 用于将空间先验注入到 ViT 模型中。具体而言, 对于 ViT 的第 个块, 搞一个交叉注意力机制 (Cross-Attention), 以输入特征 作为 Query, 空间特征 作为 Key 和 Value, 如下式所示:

式中, 为 LayerNorm, 建议使用稀疏注意。此外, 还有一个可学习向量 来平衡注意层的输出和初始化为 0 的输入特征 。这种初始化策略确保了特征分布 不会因为空间先验的注入而被大幅修改, 从而更好地利用了 ViT 预训练的权重。
1.5 多尺度特征提取器
在将空间先验注入 ViT 后, 通过在第 块的编码器层传递 来获得输出特征 。然后再用一个搞一个交叉注意力机制 (Cross-Attention) 和前馈网络 (FFN) 组成的模块来提取多尺度特征, 如图2(e) 所示。这个过程可以表述为:
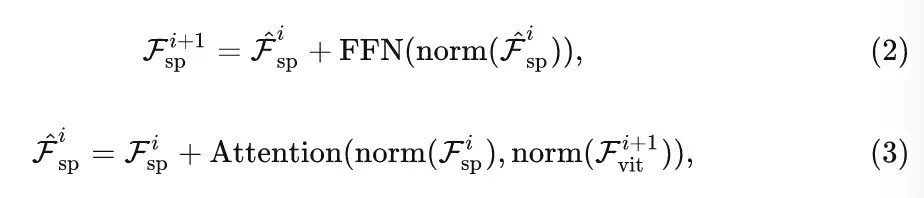
式中, 空间特征 作为 Query, 输出特征 作为 Key 和 Value。与空间特征注入器一样, 采用稀疏注意机制来降低计算成本。生成的空间特征 将作为下一个空间特征注入器的输入。
1.6 具体配置
作者为4种不同大小的 ViT 构建了 ViT-Adapter,包括 ViT-T,ViT-S,ViT-B,ViT-L。对于这些型号,Adapter 参数量分别为 2.5M、5.8M、14.0M 和 23.7M。作者使用[7]Deformable Attention 作为默认的稀疏注意力,采样点的数量固定为4。此外,作者将 FFN 的 Expansion Ratio 设置为0.25以节省计算开销。对于4个不同的适配器,FFN 的 Embedding diemnsion 大小分别为48、96、192和256。具体配置如下图3所示。

在本研究中,作者将重点放在如何更好地使现成的预训练 ViT 模型适应于下游的密集预测任务上,希望该方法也有助于上游预训练任务和下游微调过程的解耦。
1.7 COCO 目标检测实验结果
ImageNet-1K 预训练模型实验结果
使用 COCO 数据集,基于4种检测器:Mask R-CNN,Cascade Mask R-CNN,ATSS,GFL。为了节省时间和内存,作者参考 ViTDet [8]的做法并修改 LL 层 ViT 以使用 14×14 窗口注意力。使用 AdamW 优化器, Batch Size 设置为16,初始学习率为 1 × 10−4,权重衰减为0.05。
实验结果如下图4和5所示。
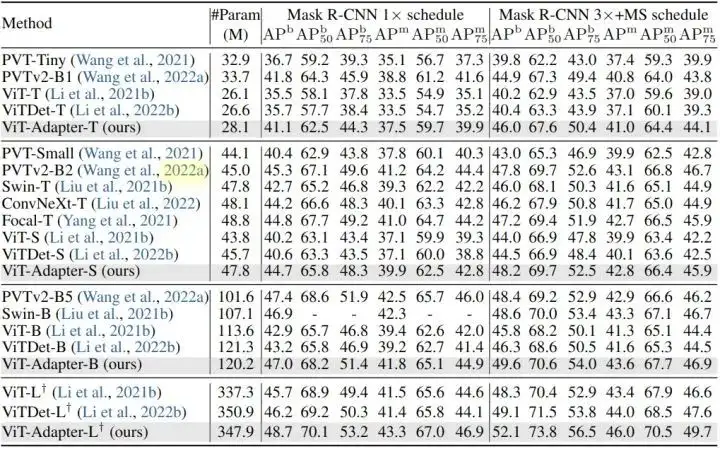
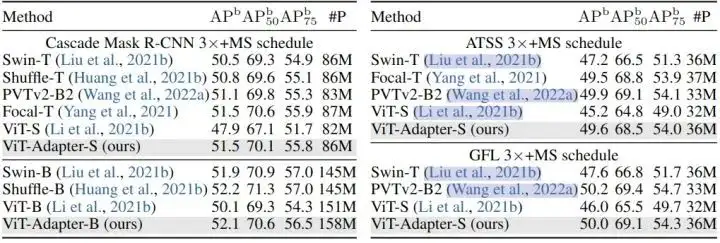
作者使用 DeiT 发布的 ImageNet-1K 权重 (无蒸馏) 作为所有 ViT-T/S/B 模型的初始化,将 ViT-Adapter 与两种相关方法进行了比较。可以看到,当使用常规训练设置进行公平比较时,ViT 和 ViTDet 的检测性能不如 ViT-Adapter。
ViT-S 和 ViTDet-S 分别比 PVTv2-B2 低 3.8 APb 和 3.3 APb。ViT-Adapter-S的性能明显优于这两种方法,甚至比PVTv2-B2 高出 0.4 APb。这种观察也同样适用于其他3个检测器。这些结果表明,仅通过常规的 ImageNet-1K 预训练,ViT- adapter 就可以使普通 ViT 获得与这些 PVT 等模型相似甚至更好的性能。通过更大的 ImageNet-22K 预训练的模型也展示出了类似的结果。
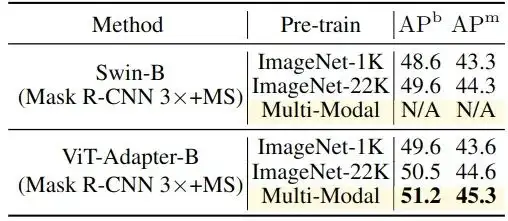
多模态预训练模型实验结果
作者还研究了多模态预训练的效果。使用不同的预训练权重对 ViT-Adapter-B 与 Mask R-CNN 的方案进行微调,实验结果如下图6所示。只需将 ImageNet-22K 预训练替换为多模态预训练,就可以获得0.7的 APb 和 APm 的显著增益。这些结果表明,Adapter 可以很容易地从先进的多模态预训练中获得相当大的收益,这对于 Swin 等特定于视觉的模型来说是很难的。
1.8 ADE20K 语义分割实验结果
ImageNet-1K 预训练模型实验结果
使用 ADE20K 数据集,基于4种分割头:Semantic FPN (遵循 PVT 的训练设置,训练模型 80k iterations),UperNet (遵循 Swin 的训练设置,训练模型 160k iterations)。实验结果如下图7所示。
作者使用 DeiT 发布的 ImageNet-1K 权重 (无蒸馏) 作为所有 ViT-T/S/B 模型的初始化,可以看到,本文方法 ViT-Adapter 超过了 ViT 和许多具有代表性的视觉 Transformer。ViT-Adapter-S 使用 UperNet 达到了 47.1 MS mIoU,优于 Swin-T。同样,ViT-Adapter-B 达到的 49.7 MS mIoU 比 ViT-B 高2.6分,与 Swin-B 相当。这些结果表明,仅通过常规的 ImageNet-1K 预训练,ViT- adapter 就可以使普通 ViT 获得与这些 Swin 等模型相似甚至更好的性能。通过更大的 ImageNet-22K 预训练的模型也展示出了类似的结果。
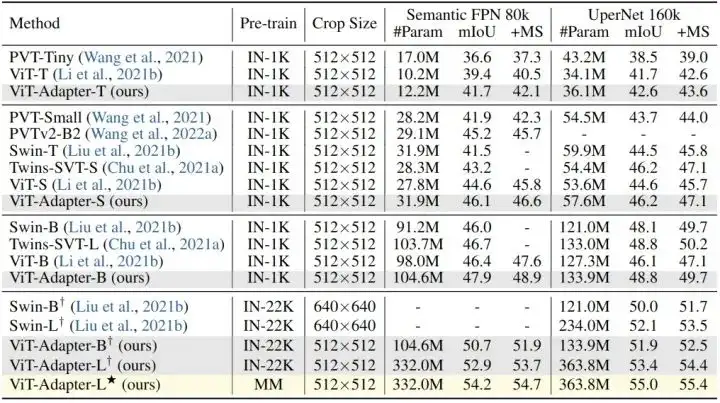
多模态预训练模型实验结果
作者还研究了多模态预训练的效果。使用 Uni-Perceiver[9]的多模态预训练权重进行语义分割。如上图7所示,对于Semantic FPN 和 UperNet,用多模态预训练取代 ImageNet-22K 预训练使得 ViT-Adapter-L 分别获得了 1.3 mIoU 和 1.6 mIoU 的惊人收益。
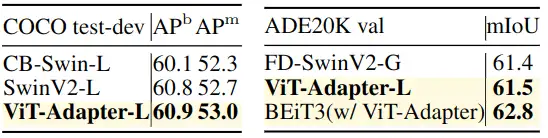
与检测分割 SOTA 方案的比较
作者将 ViT-Adapter 与最先进的检测/分割框架结合起来,包括 HTC++ 和 Mask2Former,以及最近的多模态预训练 BEiTv2。如下图8所示,ViT-Adapter 达到了最先进的性能。虽然这些结果可能部分归因于高级预训练的有效性,但这也表明,普通的 ViT 检测器/分割器也可以达到金字塔 Backbone 的性能。
总结
这篇文章就属于希望使用朴素 ViT 模型做到高性能强于的 Swin 下游任务实验结果的一个工作。看这篇工作应该是受到了 ViTDet [8]的启发,想使用纯 ViT 获得更强的下游任务性能,而且很多做法也都是参考了 ViTDet (比如 Attention)。但是本文的3个针对性模块的设计很有新意,而且使用最原始的 ViT 之后,也利用了它对对模态预训练的强大潜质。当迁移到下游的密集预测任务时,使用一个无需预训练的 Adapter 将与图像相关的归纳偏置引入 ViT,使其适合这些任务。总体来看本文是一个很好的朴素 ViT 实现强下游任务的工作,很值得推广。
参考
- ^abAn Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
- ^Swin Transformer: Hierarchical Vision Transformer using Shifted Windows
- ^CSWin Transformer: A General Vision Transformer Backbone with Cross-Shaped Windows
- ^Pyramid vision transformer: A versatile backbone for dense prediction without convolutions
- ^Uni-perceiver: Pre-training unified architecture for generic perception for zero-shot and few-shot tasks
- ^Image as a Foreign Language: BEIT Pretraining for All Vision and Vision-Language Tasks
- ^Deformable DETR: Deformable Transformers for End-to-End Object Detection
- ^abBenchmarking Detection Transfer Learning with Vision Transformers
- ^Uni-Perceiver: Pre-training Unified Architecture for Generic Perception for Zero-shot and Few-shot Tasks
欢迎关注公众号CV技术指南,专注于计算机视觉的技术总结、最新技术跟踪、经典论文解读、CV招聘信息。
【技术文档】《从零搭建pytorch模型教程》122页PDF下载
QQ交流群:470899183。群内有大佬负责解答大家的日常学习、科研、代码问题。
其它文章
CVPR 2023 深挖无标签数据价值!SOLIDER:用于以人为中心的视觉
上线一天,4k star | Facebook:Segment Anything
Efficient-HRNet | EfficientNet思想+HRNet技术会不会更强更快呢?
ICLR 2023 | SoftMatch: 实现半监督学习中伪标签的质量和数量的trade-off
目标检测创新:一种基于区域的半监督方法,部分标签即可(附原论文下载)
CNN的反击!InceptionNeXt: 当 Inception 遇上 ConvNeXt
拯救脂肪肝第一步!自主诊断脂肪肝:3D医疗影像分割方案MedicalSeg
AI最全资料汇总 | 基础入门、技术前沿、工业应用、部署框架、实战教程学习