本文展示在pytorch框架下将 pth格式转为onnx格式,然后在openvino框架下部署,并进行效果展示对比。
U2-Net模型分为大小两种:
- U2NET---173.6 MB (参数量:4千万)
- U2NEP---4.7 MB (参数量:1 百万
上述两种模型结构是一样的,唯一不同的是:U2NET在编码阶段:特征图的channel维度从3->64->128->256->512,特征图W、H由320逐步降采样至10;而U2NETP在编码阶段:特征图的channel维度从3->64->64->64->64,特征图W、H由320逐步降采样至10。可以看到,channel维度不同,不论是U2NET的stage间卷积核参数不同,其中嵌套的小型U型结构中卷积核参数也不同,综上,U2NETP相对参数量少得多。
环境:win10,下面是conda包环境:
1 # 原作者的环境是真J8扯淡! 2 conda create -n u2net python==3.8 3 pip install torch==1.6.0+cu101 torchvision==0.7.0+cu101 -f https://download.pytorch.org/whl/torch_stable.html 4 numpy==1.21.4 5 scikit-image==0.19.0 6 pillow==8.4.0 7 opencv-python==4.5.4.58 8 matplotlib==3.5.0 9 # 下面暂时不装 10 paddlepaddle 11 paddlehub 12 gradio
一、onnx模型导出
在模型导出之前,我们写一个加载原始模型文件的demo,便于后续移植到openvino中,代码u2net_demo.py:


1 import torch 2 import numpy as np 3 from model import U2NET # full size version 173.6 MB 4 import cv2 5 from model import U2NETP 6 7 # normalize the predicted SOD probability map 8 def normPRED(d): 9 ma = torch.max(d) 10 mi = torch.min(d) 11 dn = (d - mi) / (ma - mi) 12 return dn 13 def normPRED_ByNumPy(d): 14 ma = np.max(d) 15 mi = np.min(d) 16 dn = (d - mi) / (ma - mi) 17 return dn 18 19 if __name__ == "__main__": 20 """ 21 读取数据\模型 22 """ 23 image_path = "d:/Data/7.jpg" 24 use_u2net = False 25 if use_u2net: 26 model_path = "d:/CodePython/U-2-Net-master/saved_models/u2net/u2net.pth" 27 net = U2NET(3, 1) 28 else: 29 model_path = "d:/CodePython/U-2-Net-master/saved_models/u2netp/u2netp.pth" 30 net = U2NETP(3, 1) 31 32 net.load_state_dict(torch.load(model_path, map_location='cpu')) 33 net.eval() 34 35 # dataloader 36 image_src = cv2.imread(image_path, -1) # 必须是3通道 37 assert image_src.shape[2] == 3 38 """ 39 数据预处理 40 """ 41 image_src_ = cv2.cvtColor(image_src, cv2.COLOR_BGR2RGB) 42 # resize 43 output_size = 320 44 # new_size = getNewSize(image_src.shape, output_size) 45 image = cv2.resize(image_src_, (output_size, output_size)) 46 47 48 49 # sub the mean and var 50 tmpImg = np.zeros((image.shape[0], image.shape[1], 3)) 51 image = image / np.max(image) 52 tmpImg[:, :, 0] = (image[:, :, 0] - 0.485) / 0.229 53 tmpImg[:, :, 1] = (image[:, :, 1] - 0.456) / 0.224 54 tmpImg[:, :, 2] = (image[:, :, 2] - 0.406) / 0.225 55 # change the r,g,b to b,r,g from [0,255] to [0,1] 56 tmpImg = tmpImg.transpose((2, 0, 1)) 57 tmpImg = np.expand_dims(tmpImg, 0) 58 # numpy -> tensor 59 inputs_test = torch.from_numpy(tmpImg) 60 inputs_test = inputs_test.type(torch.FloatTensor) 61 62 """ 63 推理 64 """ 65 d1, d2, d3, d4, d5, d6, d7 = net(inputs_test) 66 """ 67 解析结果 68 """ 69 # normalization 70 pred = d1[0, 0, :, :] 71 predict = normPRED(pred) 72 predict_np = predict.cpu().data.numpy() 73 im = predict_np * 255 74 #im = cv2.cvtColor(im, cv2.COLOR_BGR2RGB) # pytorch输入image是BGR,和OpenCV一致 75 imo = cv2.resize(im, (image_src.shape[1], image_src.shape[0]), cv2.INTER_LINEAR) 76 imo = np.uint8(imo) 77 # show 78 cv2.imshow("image_src", image_src) 79 cv2.imshow("ret", imo) 80 cv2.waitKey(0) 81 cv2.destroyAllWindows()
下图中,左边mask是上述代码效果图,右边是官方效果图,你可以对比细微区别。上述代码采用opencv做的图像处理,官方采用torch做的图像处理,由于时间有限,我就不再debug(从输入到输出,对比下图像RGB顺序,插值算法等等就行了)。

基于官方pth大模型的分割效果;opencv图像预处理(左),pytorch图像预处理(右)
下面是两种pth模型(u2net、u2netp)的onnx格式模型导出代码export_u2net.py:
1 import torch.nn 2 from model import U2NET 3 from model import U2NETP 4 5 use_u2net = False # False for u2netp.pt 6 7 image_input = torch.autograd.Variable(torch.randn(1, 3, 320, 320)) 8 input_names = ["shiruiyu"] 9 output_names = ["output"] 10 11 if use_u2net: # for u2net.pt 12 model_path = "d:/CodePython/U-2-Net-master/saved_models/u2net/u2net.pth" 13 model = U2NET(3, 1) 14 model.load_state_dict(torch.load(model_path, map_location='cpu')) 15 model.eval() 16 torch.onnx.export(model, image_input, "saved_models/onnx/u2net_onnx.onnx", 17 verbose=True, 18 input_names=input_names, 19 output_names=output_names, 20 opset_version=11, 21 training=False) 22 else: # for u2netp.pt 23 model_path = "d:/CodePython/U-2-Net-master/saved_models/u2netp/u2netp.pth" 24 model = U2NETP(3, 1) 25 model.load_state_dict(torch.load(model_path, map_location='cpu')) 26 model.eval() 27 torch.onnx.export(model, image_input, "saved_models/onnx/u2netp_onnx.onnx", 28 verbose=True, 29 input_names=input_names, 30 output_names=output_names, 31 opset_version=11, 32 training=False) 33 34 35 print()
二、模型计算量、参数量、性能、精度对比及精度损失问题
三、openvino代码编写
将步骤1中的onnx模型拿出来,下面是openvino代码:
my_OK_u2net.py
1 """ 2 u2net 3 """ 4 5 import cv2 6 from openvino.inference_engine import IECore 7 from timeit import default_timer as timer 8 import numpy as np 9 from timeit import default_timer as timer 10 11 # normalize the predicted SOD probability map 12 def normPRED(d): 13 ma = np.max(d) 14 mi = np.min(d) 15 dn = (d - mi) / (ma - mi) 16 return dn 17 # ---------------------------Step 1. Initialize inference engine core-------------------------------------------------- 18 ie = IECore() 19 device = "CPU" 20 # ---------------------------Step 2. Read a model in OpenVINO Intermediate Representation or ONNX format--------------- 21 model_onnx = "data/u2net_onnx.onnx" 22 net = ie.read_network(model=model_onnx) 23 # ---------------------------Step 3. Configure input & output---------------------------------------------------------- 24 input_blob = next(iter(net.input_info)) 25 output_blob = list() 26 for obj in iter(net.outputs): 27 output_blob.append(obj) 28 n, c, h, w = net.inputs[input_blob].shape 29 output_blob_6 = output_blob[6] 30 print("outputs's shape = ", net.outputs[output_blob[6]].shape) 31 """ 32 读取数据模型 33 """ 34 image_path = "d:/Data/7.jpg" 35 # dataloader 36 image_src = cv2.imread(image_path, -1) # 必须是3通道 37 assert image_src.shape[2] == 3 38 """ 39 数据预处理 40 """ 41 image_src_ = cv2.cvtColor(image_src, cv2.COLOR_BGR2RGB) 42 # resize 43 image = cv2.resize(image_src_, (320, 320)) 44 # sub the mean and var 45 tmpImg = np.zeros((image.shape[0], image.shape[1], 3)) 46 image = image / np.max(image) 47 tmpImg[:, :, 0] = (image[:, :, 0] - 0.485) / 0.229 48 tmpImg[:, :, 1] = (image[:, :, 1] - 0.456) / 0.224 49 tmpImg[:, :, 2] = (image[:, :, 2] - 0.406) / 0.225 50 # change the r,g,b to b,r,g from [0,255] to [0,1] 51 tmpImg = tmpImg.transpose((2, 0, 1)) 52 # ---------------------------Step 4. Loading model to the device------------------------------------------------------- 53 exec_net = ie.load_network(network=net, device_name=device) 54 # ---------------------------Step 5. Create infer request-------------------------------------------------------------- 55 # ---------------------------Step 6. Prepare input--------------------------------------------------------------------- 56 # ---------------------------Step 7. Do inference---------------------------------------------------------------------- 57 start_time = timer() 58 res = exec_net.infer(inputs={input_blob: [tmpImg]}) 59 cost_time = timer() - start_time 60 print("cost_time:", cost_time) 61 res = res[output_blob_6] 62 pred = res[0, 0, :, :] 63 predict = normPRED(pred) 64 im = predict * 255 65 im = cv2.cvtColor(im, cv2.COLOR_BGR2RGB) # pytorch输入image是BGR,和OpenCV一致 66 imo = cv2.resize(im, (image_src.shape[1], image_src.shape[0]), cv2.INTER_LINEAR) 67 imo = np.uint8(imo) 68 # show 69 cv2.imshow("image_src", image_src) 70 cv2.imshow("vino-ret", imo) 71 cv2.waitKey(0)
my_OK_u2netp.py
1 """ 2 u2netp 3 """ 4 5 import cv2 6 from openvino.inference_engine import IECore 7 from timeit import default_timer as timer 8 import numpy as np 9 from timeit import default_timer as timer 10 11 # normalize the predicted SOD probability map 12 def normPRED(d): 13 ma = np.max(d) 14 mi = np.min(d) 15 dn = (d - mi) / (ma - mi) 16 return dn 17 # ---------------------------Step 1. Initialize inference engine core-------------------------------------------------- 18 ie = IECore() 19 device = "CPU" 20 # ---------------------------Step 2. Read a model in OpenVINO Intermediate Representation or ONNX format--------------- 21 model_onnx = "data/u2netp_onnx.onnx" 22 net = ie.read_network(model=model_onnx) 23 # ---------------------------Step 3. Configure input & output---------------------------------------------------------- 24 input_blob = next(iter(net.input_info)) 25 output_blob = list() 26 for obj in iter(net.outputs): 27 output_blob.append(obj) 28 n, c, h, w = net.inputs[input_blob].shape 29 output_blob_6 = output_blob[6] 30 print("outputs's shape = ", net.outputs[output_blob[6]].shape) 31 """ 32 读取数据模型 33 """ 34 image_path = "d:/Data/7.jpg" 35 # dataloader 36 image_src = cv2.imread(image_path, -1) # 必须是3通道 37 assert image_src.shape[2] == 3 38 """ 39 数据预处理 40 """ 41 image_src_ = cv2.cvtColor(image_src, cv2.COLOR_BGR2RGB) 42 # resize 43 image = cv2.resize(image_src_, (320, 320)) 44 # sub the mean and var 45 tmpImg = np.zeros((image.shape[0], image.shape[1], 3)) 46 image = image / np.max(image) 47 tmpImg[:, :, 0] = (image[:, :, 0] - 0.485) / 0.229 48 tmpImg[:, :, 1] = (image[:, :, 1] - 0.456) / 0.224 49 tmpImg[:, :, 2] = (image[:, :, 2] - 0.406) / 0.225 50 # change the r,g,b to b,r,g from [0,255] to [0,1] 51 tmpImg = tmpImg.transpose((2, 0, 1)) 52 # ---------------------------Step 4. Loading model to the device------------------------------------------------------- 53 exec_net = ie.load_network(network=net, device_name=device) 54 # ---------------------------Step 5. Create infer request-------------------------------------------------------------- 55 # ---------------------------Step 6. Prepare input--------------------------------------------------------------------- 56 # ---------------------------Step 7. Do inference---------------------------------------------------------------------- 57 start_time = timer() 58 res = exec_net.infer(inputs={input_blob: [tmpImg]}) 59 cost_time = timer() - start_time 60 print("cost_time:", cost_time) 61 res = res[output_blob_6] 62 pred = res[0, 0, :, :] 63 predict = normPRED(pred) 64 im = predict * 255 65 im = cv2.cvtColor(im, cv2.COLOR_BGR2RGB) # pytorch输入image是BGR,和OpenCV一致 66 imo = cv2.resize(im, (image_src.shape[1], image_src.shape[0]), cv2.INTER_LINEAR) 67 imo = np.uint8(imo) 68 # show 69 cv2.imshow("image_src", image_src) 70 cv2.imshow("vino-ret", imo) 71 cv2.waitKey(0)
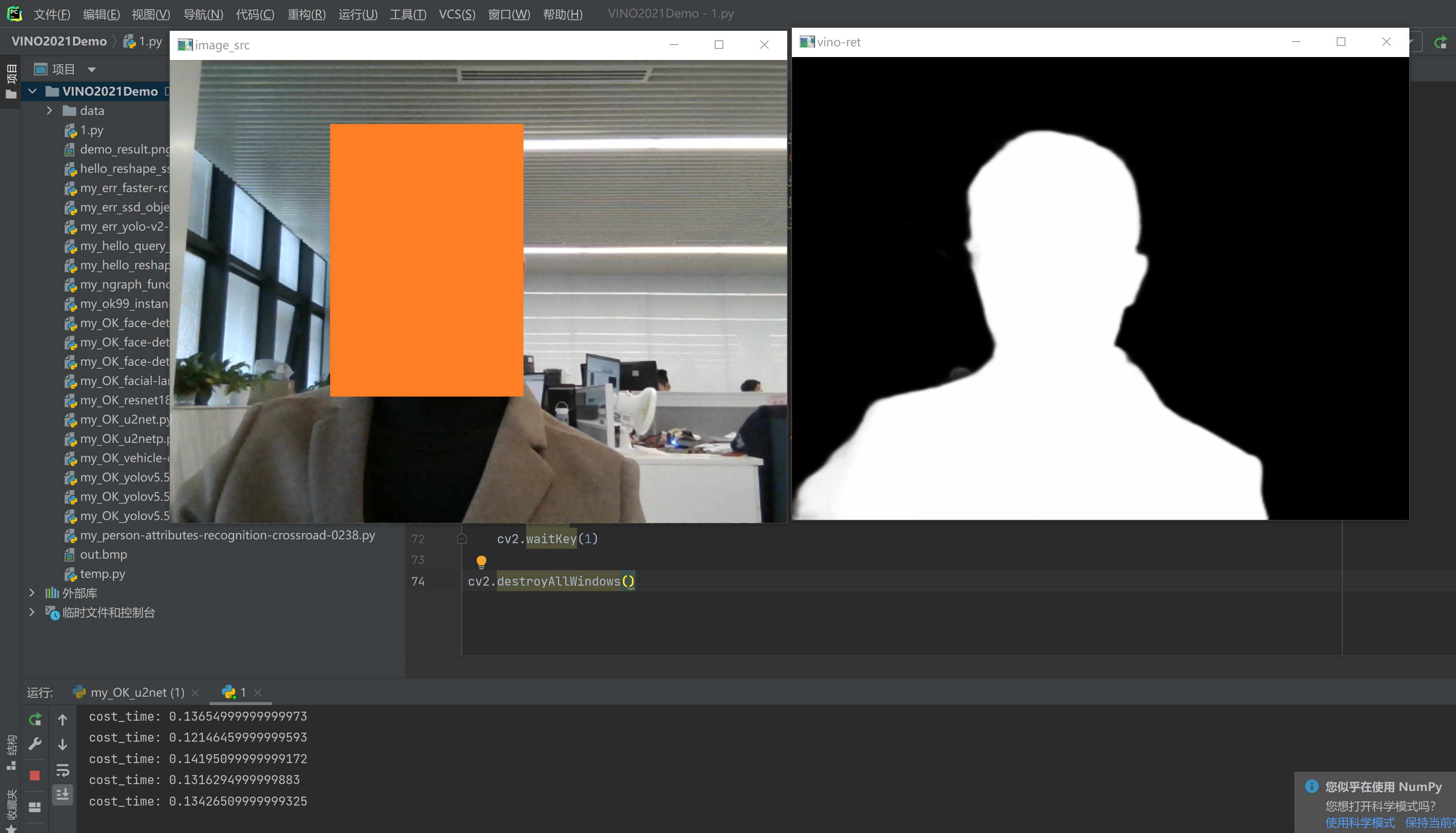
我们对比下,所有细节完全一致,咱们部署模型的效果达到了:

基于openvino+opencv的处理结果(左),基于torch+opencv的处理结果(右)
四、CPU上实时背景去除
感觉还可以啊。