雷达的波形主要分为两大类:连续雷达波形;脉冲雷达波形。
早期雷达波形为脉冲波形,并且人们根据电磁波反射特性判断电磁波传播路径上是否有目标,并且根据反射的时延判断目标与雷达位置的直线距离有多远。
根据接收的电磁波信号与实际发射的电磁波信号的频率差(多普勒频率),通过目标速度与多普勒信号之间的关系得到目标的速度信息。
调频连续波雷达,其利用收发信号的频率差实现测距;也对单频信号的相位进行编码得到相位编码连续波雷达,其根据收发信号相位变化的起始时间差进行测距;还有多频连续波雷达,根据不同频率回波信号的相位差,实现测距。
雷达组成
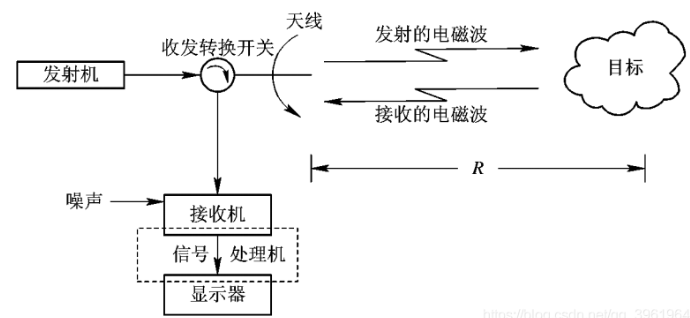
雷达与通信差异
相对于通信电磁波功率,雷达发射的电磁波功率会很大。
雷达的接收和发送不能同时进行。
各种测量原理
测量距离原理是测量发射脉冲与回波脉冲之间的时间差,因电磁波以光速传播,据此就能换算成雷达与目标的精确距离
测量速度原理是雷达根据自身和目标之间有相对运动产生的频率多普勒效应。雷达接收到的目标回波频率与雷达发射频率不同,两者的差值称为多普勒频率。
测量目标方位原理是利用天线的尖锐方位波束,通过测量仰角靠窄的仰角波束,从而根据仰角和距离就能计算出目标高度
工作频率
普通雷达的工作频率在220MHz至35GHz,实际工作频率范围则更大。例如天线超视距雷达工作在5MHz;毫米波雷达工作在94GHz,激光雷达工作的频率则更高。
雷达模糊函数
模糊函数是用来描述雷达信号波形的主要指标。
相控阵雷达与MIMO雷达
MIMO(多输入多输出)雷达的概念引用自通信领域的MIMO通信系统,相比于传统的相控阵,MIMO雷达可以让每个发射天线发射独立的波形,因此获得了更多的自由度。
信号频谱上第一个零点的宽度。由于时域上离散的数字信号在频域上有无限的谱分量,所以常取第一个零点作为此信号的带宽。
零点是指系统输入幅度不为零且输入频率使系统输出为零的时候,称此时的输入频率值为零点。
极点是指系统输入幅度不为零且输入频率使系统输出为无穷大的时候,称此时的频率值为极点。