2. Output an Image
- PPM文件格式

- 写PPM文件内容
#include <iostream>
int main() {
// Image
const int image_width = 256;
const int image_height = 256;
// Render
std::cout << "P3\n" << image_width << ' ' << image_height << "\n255\n";
for (int j = image_height - 1; j >= 0; --j) {
std::cerr << "\rScanlines remaining: " << j << ' ' << std::flush;
for (int i = 0; i < image_width; ++i) {
auto r = double(i) / (image_width - 1);
auto g = double(j) / (image_height - 1);
auto b = 0.25;
int ir = static_cast<int>(255.999 * r);
int ig = static_cast<int>(255.999 * g);
int ib = static_cast<int>(255.999 * b);
std::cout << ir << ' ' << ig << ' ' << ib << '\n';
}
}
std::cerr << "\nDone.\n";
}
- 生成.ppm文件
.\RayTracing.exe > image.ppm

3. The vec3 Class
- vec3.h定义了一个三维矢量,包括矢量的值和一系列数值操作,此外,将其重命名为point3与color。
#ifndef VEC3_H
#define VEC3_H
#include <cmath>
#include <iostream>
using std::sqrt;
class vec3 {
public:
vec3() : e{0,0,0} {}
vec3(double e0, double e1, double e2) : e{e0, e1, e2} {}
double x() const { return e[0]; }
double y() const { return e[1]; }
double z() const { return e[2]; }
vec3 operator-() const { return vec3(-e[0], -e[1], -e[2]); }
double operator[](int i) const { return e[i]; }
double& operator[](int i) { return e[i]; }
vec3& operator+=(const vec3 &v) {
e[0] += v.e[0];
e[1] += v.e[1];
e[2] += v.e[2];
return *this;
}
vec3& operator*=(const double t) {
e[0] *= t;
e[1] *= t;
e[2] *= t;
return *this;
}
vec3& operator/=(const double t) {
return *this *= 1/t;
}
double length() const {
return sqrt(length_squared());
}
double length_squared() const {
return e[0]*e[0] + e[1]*e[1] + e[2]*e[2];
}
public:
double e[3];
};
// Type aliases for vec3
using point3 = vec3; // 3D point
using color = vec3; // RGB color
#endif
- vec3 utility functions也被定义在头文件vec3.h中,包括一系列的运算。
// vec3 Utility Functions
inline std::ostream& operator<<(std::ostream &out, const vec3 &v) {
return out << v.e[0] << ' ' << v.e[1] << ' ' << v.e[2];
}
inline vec3 operator+(const vec3 &u, const vec3 &v) {
return vec3(u.e[0] + v.e[0], u.e[1] + v.e[1], u.e[2] + v.e[2]);
}
inline vec3 operator-(const vec3 &u, const vec3 &v) {
return vec3(u.e[0] - v.e[0], u.e[1] - v.e[1], u.e[2] - v.e[2]);
}
inline vec3 operator*(const vec3 &u, const vec3 &v) {
return vec3(u.e[0] * v.e[0], u.e[1] * v.e[1], u.e[2] * v.e[2]);
}
inline vec3 operator*(double t, const vec3 &v) {
return vec3(t*v.e[0], t*v.e[1], t*v.e[2]);
}
inline vec3 operator*(const vec3 &v, double t) {
return t * v;
}
inline vec3 operator/(vec3 v, double t) {
return (1/t) * v;
}
inline double dot(const vec3 &u, const vec3 &v) {
return u.e[0] * v.e[0]
+ u.e[1] * v.e[1]
+ u.e[2] * v.e[2];
}
inline vec3 cross(const vec3 &u, const vec3 &v) {
return vec3(u.e[1] * v.e[2] - u.e[2] * v.e[1],
u.e[2] * v.e[0] - u.e[0] * v.e[2],
u.e[0] * v.e[1] - u.e[1] * v.e[0]);
}
inline vec3 unit_vector(vec3 v) {
return v / v.length();
}
- Color Utility Functions被定义在color.h中,用于输出一个像素的RGB值
#ifndef COLOR_H
#define COLOR_H
#include "vec3.h"
#include <iostream>
void write_color(std::ostream &out, color pixel_color) {
// Write the translated [0,255] value of each color component.
out << static_cast<int>(255.999 * pixel_color.x()) << ' '
<< static_cast<int>(255.999 * pixel_color.y()) << ' '
<< static_cast<int>(255.999 * pixel_color.z()) << '\n';
}
#endif
- 使用头文件定义的类,改写cpp文件
#include "color.h"
#include "vec3.h"
#include <iostream>
int main() {
// Image
const int image_width = 256;
const int image_height = 256;
// Render
std::cout << "P3\n" << image_width << ' ' << image_height << "\n255\n";
for (int j = image_height-1; j >= 0; --j) {
std::cerr << "\rScanlines remaining: " << j << ' ' << std::flush;
for (int i = 0; i < image_width; ++i) {
color pixel_color(double(i)/(image_width-1), double(j)/(image_height-1), 0.25);
write_color(std::cout, pixel_color);
}
}
std::cerr << "\nDone.\n";
}
4. Rays, a Simple Camera, and Background
- 将Ray类定义在ray.h文件中,主要内容是起点和方向俩个vec3类成员,以及查询t时刻的光线位置的成员函数
at。
#ifndef RAY_H
#define RAY_H
#include "vec3.h"
class ray {
public:
ray() {}
ray(const point3& origin, const vec3& direction)
: orig(origin), dir(direction)
{}
point3 origin() const { return orig; }
vec3 direction() const { return dir; }
point3 at(double t) const {
return orig + t*dir;
}
public:
point3 orig;
vec3 dir;
};
#endif
- 按照如下方式给出camera
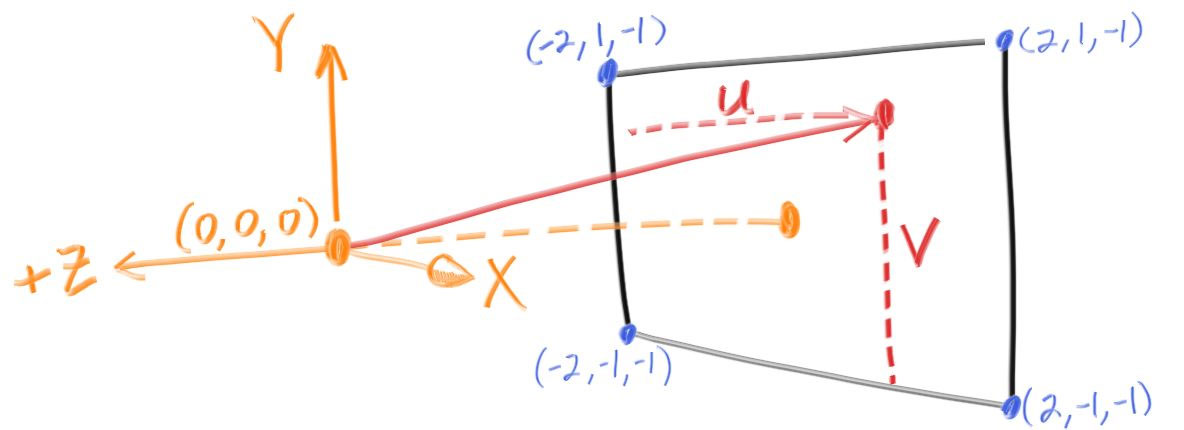
- 下面是一个简单的着色尝试,按照camera上面像素的光线向量的单位矢量的y值作为蓝色与白色之间的插值进行着色。
#include "color.h"
#include "ray.h"
#include "vec3.h"
#include <iostream>
color ray_color(const ray& r) {
vec3 unit_direction = unit_vector(r.direction());
auto t = 0.5*(unit_direction.y() + 1.0);
return (1.0-t)*color(1.0, 1.0, 1.0) + t*color(0.5, 0.7, 1.0);
}
int main() {
// Image
const auto aspect_ratio = 16.0 / 9.0;
const int image_width = 400;
const int image_height = static_cast<int>(image_width / aspect_ratio);
// Camera
auto viewport_height = 2.0;
auto viewport_width = aspect_ratio * viewport_height;
auto focal_length = 1.0;
auto origin = point3(0, 0, 0);
auto horizontal = vec3(viewport_width, 0, 0);
auto vertical = vec3(0, viewport_height, 0);
auto lower_left_corner = origin - horizontal/2 - vertical/2 - vec3(0, 0, focal_length);
// Render
std::cout << "P3\n" << image_width << " " << image_height << "\n255\n";
for (int j = image_height-1; j >= 0; --j) {
std::cerr << "\rScanlines remaining: " << j << ' ' << std::flush;
for (int i = 0; i < image_width; ++i) {
auto u = double(i) / (image_width-1);
auto v = double(j) / (image_height-1);
ray r(origin, lower_left_corner + u*horizontal + v*vertical - origin);
color pixel_color = ray_color(r);
write_color(std::cout, pixel_color);
}
}
std::cerr << "\nDone.\n";
}
效果为:

5. Adding a Sphere
- 光线与球面的相交检测
对于一个球面,其implicit model为

可以表示成矢量形式

利用光线的传播形式计算交点:


得到一个二阶多项式方程:

因此,可以判断交点的个数,以及求解出交点位置。在本文中将只有一个焦点视作不相交。

- 定义一个相交检测函数
hit_sphere,并修改着色函数将相交处着色为红色。
bool hit_sphere(const point3& center, double radius, const ray& r) {
vec3 oc = r.origin() - center;
auto a = dot(r.direction(), r.direction());
auto b = 2.0 * dot(oc, r.direction());
auto c = dot(oc, oc) - radius*radius;
auto discriminant = b*b - 4*a*c;
return (discriminant > 0);
}
color ray_color(const ray& r) {
if (hit_sphere(point3(0,0,-1), 0.5, r))
return color(1, 0, 0);
vec3 unit_direction = unit_vector(r.direction());
auto t = 0.5*(unit_direction.y() + 1.0);
return (1.0-t)*color(1.0, 1.0, 1.0) + t*color(0.5, 0.7, 1.0);
}

然而,这种检测将光线视作直线,所以需要进行合理性判断。
6. Surface Normals and Multiple Objects
- 在hit_sphere函数内部加入相交点的法线计算部分,进一步的利用法线坐标表示颜色来检测法线计算的效果
double hit_sphere(const point3& center, double radius, const ray& r) {
vec3 oc = r.origin() - center;
auto a = dot(r.direction(), r.direction());
auto b = 2.0 * dot(oc, r.direction());
auto c = dot(oc, oc) - radius*radius;
auto discriminant = b*b - 4*a*c;
if (discriminant < 0) {
return -1.0;
} else {
return (-b - sqrt(discriminant) ) / (2.0*a);
}
}
color ray_color(const ray& r) {
auto t = hit_sphere(point3(0,0,-1), 0.5, r);
if (t > 0.0) {
vec3 N = unit_vector(r.at(t) - vec3(0,0,-1));
return 0.5*color(N.x()+1, N.y()+1, N.z()+1);
}
vec3 unit_direction = unit_vector(r.direction());
t = 0.5*(unit_direction.y() + 1.0);
return (1.0-t)*color(1.0, 1.0, 1.0) + t*color(0.5, 0.7, 1.0);
}

- 对hit_sphere进行优化,使用half_b代替b则减少了数乘计算;同时使用vec3的成员函数进行内积运算,减少了对dot的使用,即减少了对中间vec3变量的需求。

double hit_sphere(const point3& center, double radius, const ray& r) {
vec3 oc = r.origin() - center;
auto a = r.direction().length_squared();
auto half_b = dot(oc, r.direction());
auto c = oc.length_squared() - radius*radius;
auto discriminant = half_b*half_b - a*c;
if (discriminant < 0) {
return -1.0;
} else {
return (-half_b - sqrt(discriminant) ) / a;
}
}
- 在hit.h头文件中定义了相交结果的结构体,此外定义了一个相交检测的抽象类,内部定义了相交检测的纯虚函数。该hit函数参数有光线,最大最小时间限定,与hit_record结构体,时间限定用于进一步判断相交是否有效,用于判断相交位置是否是最近位置,以减少法线计算的需求,hit_record则用于记录最近相交位置的信息。
#ifndef HITTABLE_H
#define HITTABLE_H
#include "ray.h"
struct hit_record {
point3 p;
vec3 normal;
double t;
};
class hittable {
public:
virtual bool hit(const ray& r, double t_min, double t_max, hit_record& rec) const = 0;
};
#endif
- 此外在sphere.h头文件中定义了sphere类,记录了球体的基本数值信息,此外继承了hittable类,并重写了hit函数。
#ifndef SPHERE_H
#define SPHERE_H
#include "hittable.h"
#include "vec3.h"
class sphere : public hittable {
public:
sphere() {}
sphere(point3 cen, double r) : center(cen), radius(r) {};
virtual bool hit(
const ray& r, double t_min, double t_max, hit_record& rec) const override;
public:
point3 center;
double radius;
};
bool sphere::hit(const ray& r, double t_min, double t_max, hit_record& rec) const {
vec3 oc = r.origin() - center;
auto a = r.direction().length_squared();
auto half_b = dot(oc, r.direction());
auto c = oc.length_squared() - radius*radius;
auto discriminant = half_b*half_b - a*c;
if (discriminant < 0) return false;
auto sqrtd = sqrt(discriminant);
// Find the nearest root that lies in the acceptable range.
auto root = (-half_b - sqrtd) / a;
if (root < t_min || t_max < root) {
root = (-half_b + sqrtd) / a;
if (root < t_min || t_max < root)
return false;
}
rec.t = root;
rec.p = r.at(rec.t);
rec.normal = (rec.p - center) / radius;
return true;
}
#endif
- 为了检测光线是从内部还是外部相交,在hit_record中定义一个bool成员,此外定义一个内联成员函数用于判断内外关系,并更新法线和内外关系。相应的,修改sphere::hit。
struct hit_record {
point3 p;
vec3 normal;
double t;
bool front_face;
inline void set_face_normal(const ray& r, const vec3& outward_normal) {
front_face = dot(r.direction(), outward_normal) < 0;
normal = front_face ? outward_normal :-outward_normal;
}
};
bool sphere::hit(const ray& r, double t_min, double t_max, hit_record& rec) const {
...
rec.t = root;
rec.p = r.at(rec.t);
vec3 outward_normal = (rec.p - center) / radius;
rec.set_face_normal(r, outward_normal);
return true;
}