在了解PPO之前,首先需要了解Policy Gradient,PPO是建立在PG上的。
Policy Gradient
基本参考https://zhuanlan.zhihu.com/p/66205274进行整理。
给定状态和动作的序列
$s1\rightarrow a1\rightarrow s2 \rightarrow a2\rightarrow ...\rightarrow sT $
记Trajectory为$ \tau={ s1,a1,s2,a2,...,sT,aT }$
则有
奖励记为
得到奖励的期望
对其求梯度
进行一些变换
转化成采样
将(1)带入到(6),移除\(\theta\)梯度为0的项,得到
\(p_\theta(a_{t}^{n}|s_{t}^{n})\)为模型的输出,可以轻松计算梯度
转化成loss
其他:
可以对奖励加入一个baseline,保证反馈有正有负
可以看到,对于每个action,都有相同的\(R(\tau^{n})-b\),可以看做是这个动作的权重,但是每个序列的所有动作都有相同的权重看起来并不是特别合理,可以直觉地考虑,每个动作只会对对后续动作产生影响,则权重应该来自于后续的reward。所以修改奖励:
对于每一个action,他对当前奖励影响较大,随着时间推移,这个动作的影响会越来越小,所以应该添加一个修正因子\(\gamma<1\)
得到奖励期望的梯度。
由上面可知,
\(loss=-\frac{1}{N}\sum_{n=1}^{N}\sum_{t=1}^{T_n}{R(\tau^{n})\log(p_\theta(a_{t}^{n}|s_{t}^{n}))}\)
\(\log(p_\theta(a_{t}^{n}|s_{t}^{n}))\)对应模型输出token的log_prob,生成的句子的整体reward搭配每个token的log_prob构成了整体loss。
Proximal Policy Optimization(PPO)
基本翻译自https://huggingface.co/learn/deep-rl-course/unit8,稍加整理&自我理解
Actor Critic (A2C)是一种混合结构,包含了基于value和基于policy的方法,包括:
- Actor:控制agent的行为
- Critic:度量action的好坏
PPO是一种架构,通过避免policy更新太大,来提升模型训练的稳定性。
维护两个policy,每个policy是AC结构,对旧policy进行动作采样,得到reward等,对新policy进行更新。
采用一个比例表示新旧policy的差别,并将这个比例clip到\([1-\epsilon, 1+\epsilon]\)
Intuition
PPO的主要idea是想在训练时,通过限制对policy的改变来增加训练的稳定性。也就是避免对policy有太大的更新
两个原因:
- 实验表明,训练时对policy进行更小的更新更可能收敛到最优结果。
- policy的更新太大容易造成得到不好的policy,loss雪崩,可能导致长时间无法恢复或者不能恢复
PPO中采用更加保守的更新policy的方式、
截断代理目标函数
policy的目标函数,
\(L^{PG}(\theta) = E_t[\log \pi_{\theta}(a_t | s_t) * A_t]\)
其中\(\log \pi_{\theta}(a_t | s_t)\)是某state下的action的log_prob,如果A>0,说明这个action是比其他在这个state的action要好。
PG中计算的梯度可以是对这个目标函数进行梯度计算。
对这个目标函数进行梯度上升时,会推动agent采取能有更好reward的action,避免不好的action。
然后,step的大小引出了些问题:
- 太小,训练过程过慢
- 太大:训练时存在太多变化
PPO采用截断代理目标函数的方法得到的新目标函数来更新policy,使用截断的方法限制policy只在小范围中改变。
新函数主要用来避免过大权重更新带来的破坏性后果。
截断代理目标函数:
\(L^{CLIP}(\theta)=\hat{E_t}[\min (r_t(\theta)\hat A_t, clip(r_t(\theta), 1-\epsilon, 1+\epsilon) \hat A_t)]\)
作为之前目标函数的替换,同样可以进行梯度提升。
其中,\(r_t(\theta)\)是比例函数。\(r_t(\theta) = \frac{\pi_\theta (a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)}\)是在状态\(s_t\)下,当前policy选取\(a_t\)的概率比上之前policy选取\(a_t\)的概率。
可以看到,\(r_t(\theta)\)表示当前和之前policy的概率比例:
- 如果\(r_t(\theta)>1\),\(s_t\)时的\(a_t\)更可能在当前policy中出现
- 如果\(r_t(\theta)\)介于0和1之间,\(a_t\)更可能在之前policy中出现
所以说这个概率比例是一种评估新旧policy区别的简单方法。
截断代理目标函数中的未截断部分\(r_t(\theta)\hat A_t\),这个比例替换了掉代理目标函数的log_prob,
这提供了新目变函数的左侧部分,令A乘比例。
\(L^{CPI}(\theta)=\hat E_t [\frac{\pi_\theta (a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)}\hat A_t] = \hat E_t [r_t(\theta) \hat A_t]\)
如果只看这样的话,那就缺少了一些限制,如果action在当前policy中远比之前policy中更可能出现,将会引入一个很大的梯度step,所以会让policy更新过大。
所以,需要对远离1的比例添加惩罚项,
在进行惩罚时,有两种方案吧:
- TRPO(Trust Region Policy Optimization)在目标函数外使用KL散度来限制policy更新。但该方法实现复杂,计算时间长。
- PPO,使用截断代理目标函数直接裁剪目标函数的概率。
在这里,对比率进行截断,
\(L^{CLIP}(\theta)=\hat{E_t}[\min (r_t(\theta)\hat A_t, clip(r_t(\theta), 1-\epsilon, 1+\epsilon) \hat A_t)]\)
因此,因为当前policy不会与之前的有太大变化,保证了不会有太大的policy更新。
\(r_t(\theta)\)被截断到\([1-\epsilon, 1+\epsilon]\)之间。
截断代理目标函数里面有两个概率比例,一个是没被截断的,一个是被截断到\([1-\epsilon, 1+\epsilon]\)之间的,\(\epsilon\)是一个超参数,用了定义阶段区间,论文中定义\(\epsilon=0.2\)
然后采用截断和未截断的取小,所以最终目标是未截断目标的下界。
从截断和未截断中取小意味着我们会根据比例和advantage来选择截断或者未截断。
advantage为正时,期待有更大的\(r_t\),但会被\(1+\epsilon\)截断
advantage为负时,期待有更小的\(r_t\),但会被\(1-\epsilon\)截断,不能小得很放肆
截断代理目标函数可视化
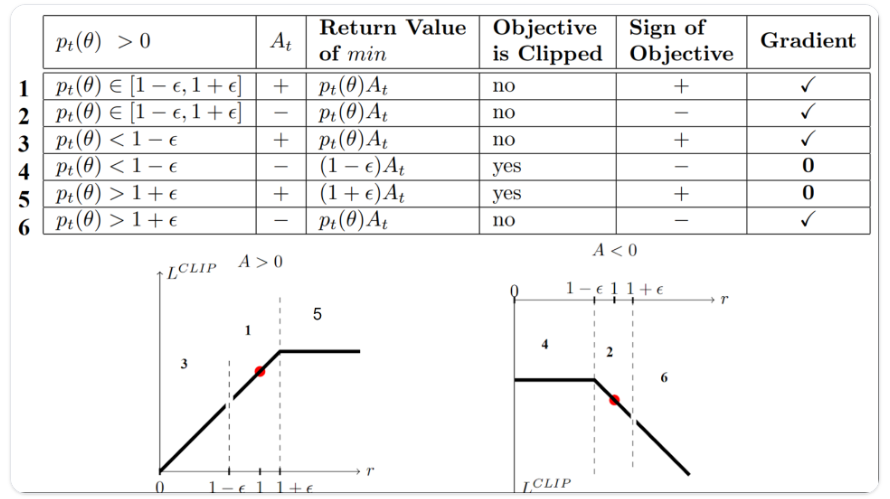
根据截断和不截断取小,有6种情况。
case1&2 比例在范围区间内
未发生截断,因为比例在\([1-\epsilon, 1+\epsilon]\)之间。
在1中,advantage为正,action比在这个state下的action平均值要好。因此,需要鼓励policy增加state选择这个action的概率。
在2中,advantage为负,action比在这个state下的action平均值要差。因此,需要让policy减少这个state选择这个action的概率。
这两个变化都不大,都无需截断。
case3&4, 比例低于范围区间
如果概率比例低于[1−ϵ],这个state选择这个action的概率会比之前policy下低很多。
在3中,advantage为正,希望增加action的概率,也没增加多少。
在4中,advantage为负,希望新的policy更少选择这个action,\(r_t(\theta)\hat A_t > clip(r_t(\theta), 1-\epsilon, 1+\epsilon) \hat A_t\),已经比以前小了,但也打算小不了太少,截断成\(1-\epsilon\),此时梯度为0
case5&6,比例高于范围区间
这个state选择这个action的概率会比之前policy下高很多。
在5中,advantage为正,但不想要太多,已经比之前policy选这个action的概率要高了。因此,进行截断,梯度为0.
在6中,advantage为负,打算减少这个action的概率。
综上,只在未产生截断的部分进行对policy的更新。当取小的值是截断目标部分,不会更新\(\theta\)因为梯度是0.
所以,需要更新policy的场景有:
- 比例在\([1-\epsilon, 1+\epsilon]\)之间
- 比例在区间之外,但是advantage会让选择更靠近合适区间:
- 低于范围区间但是advantage大于0
- 高于范围区间但是advantage小于0
关于产生截断时梯度为0的解释:因为比例被截断时,此时的导数不会是\(r_t(\theta)*A_t\)的导数,而是\((1-\epsilon)*A_t\)或者\((1+\epsilon)*A_t\)对\(\theta\)的导数,这两部分都是0。
总的来说,根据截断代理目标,限制了当前policy从之前policy能改变的范围。超过范围的梯度就是0,避免事态严重化。
最终的PPO AC截断代理目标函数如下,包含了截断代理目标函数、价值函数、entropy bonus。
其中,\(c1\)和\(c2\)是系数,\(L_t^{VF}(\theta)\)是平方误差价值函数\((V_\theta(S_t)-V_{+}^{targ})^2\),用作训练critc模型,令预测值接近reward
\(S[\pi_\theta](s_t)\)是entropy bonus,也就是打算让policy选择的action的entropy变大,这样会保证模型产生足够的探索。
参考
https://huggingface.co/learn/deep-rl-course/unit8
[细(戏)说]RLHF场景下的PPO算法的来龙去脉 - 小神弟弟的文章 - 知乎 https://zhuanlan.zhihu.com/p/631338315
【强化学习2】Policy Gradient - LGC的文章 - 知乎 https://zhuanlan.zhihu.com/p/66205274
【深度强化学习】信任域策略优化:从TRPO到PPO - XuanAxuan的文章 - 知乎 https://zhuanlan.zhihu.com/p/440451849