图有关的概念
1、连通图、连通分量是相对于无向图说的,而强连通图、强连通分量是相对于有向图说的
2、生成树,连通图的生成树是包含图中全部顶点的一个极小连通子图。若砍去一条边,则一定变得非连通
3、极大连通子图与极小连通子图,极小连通子图就是生成树,极大连通子图就是无向图的连通分量
极大要求包含该连通子图的所有边,极小要求保持连通且边最小
连通图的连通分量/极大连通子图就是它自己
4、简单路径、简单回路:
在路径序列中,顶点不重复出现的路径称为简单路径。
除第一个顶点和最后一个顶点外,其余顶点不重复出现的回路称为简单回路。
图的存储
一般有四种方法---邻接矩阵法、邻接表法、十字链表法、邻接多重表,常用的只有前两种
邻接矩阵法
#define N 8 //顶点数目的最大值,根据题目要求自己定义
typedef struct{
char vex[N]; //N个顶点信息,每个顶点存储一个char字符,可根据题目要求将char改为其他类型
int weight[N][N]; //N*N邻接矩阵,每条边的权值用int变量表示
int vexnum,arcnum; //图的当前顶点数和弧数
}MGraph;
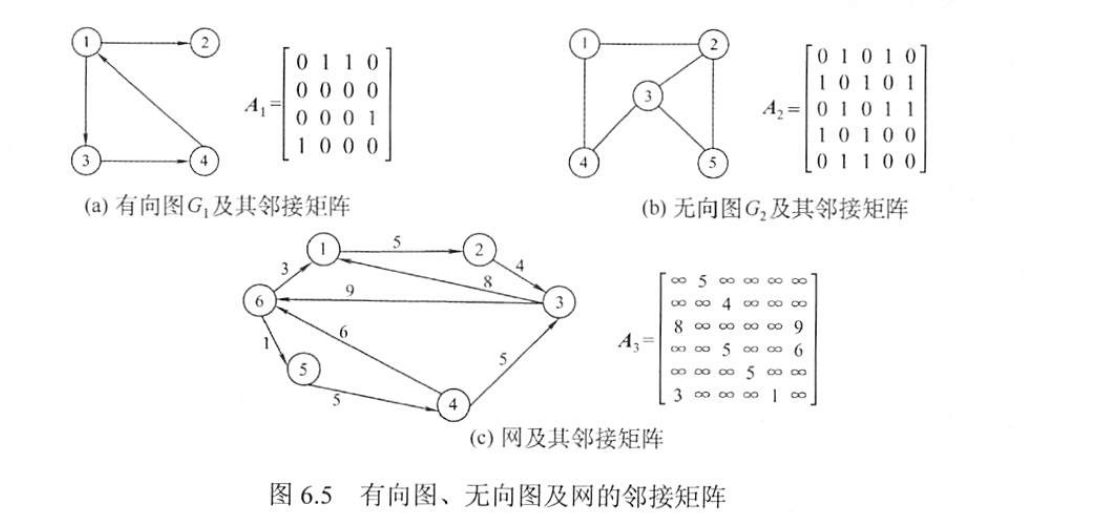
需要注意的是
1、无向图的邻接矩阵是对称矩阵,对规模特大的邻接矩阵可采用压缩存储。
2、稠密图适合使用邻接矩阵的存储表示。
3、


邻接表法
#define N 8 //图中顶点数目的最大值,根据题目要求自己定义
typedef struct ArcNode{ //弧结点
int vexIndex; //该弧所指向的顶点编号
int weight; //该弧的权值
struct ArcNode *next; //指向下一个弧结点
}ArcNode;
typedef struct VNode{ //顶点结点
char data; //顶点信息,每个顶点存储一个char字符,可根据题目要求将char改为其他类型
ArcNode *first; //指向第一条依附该顶点的弧的指针
}VNode;
typedef struct{
VNode vex[N]; //N个顶点
int vexnum,arcnum; //图的顶点数和弧数
} ALGraph;
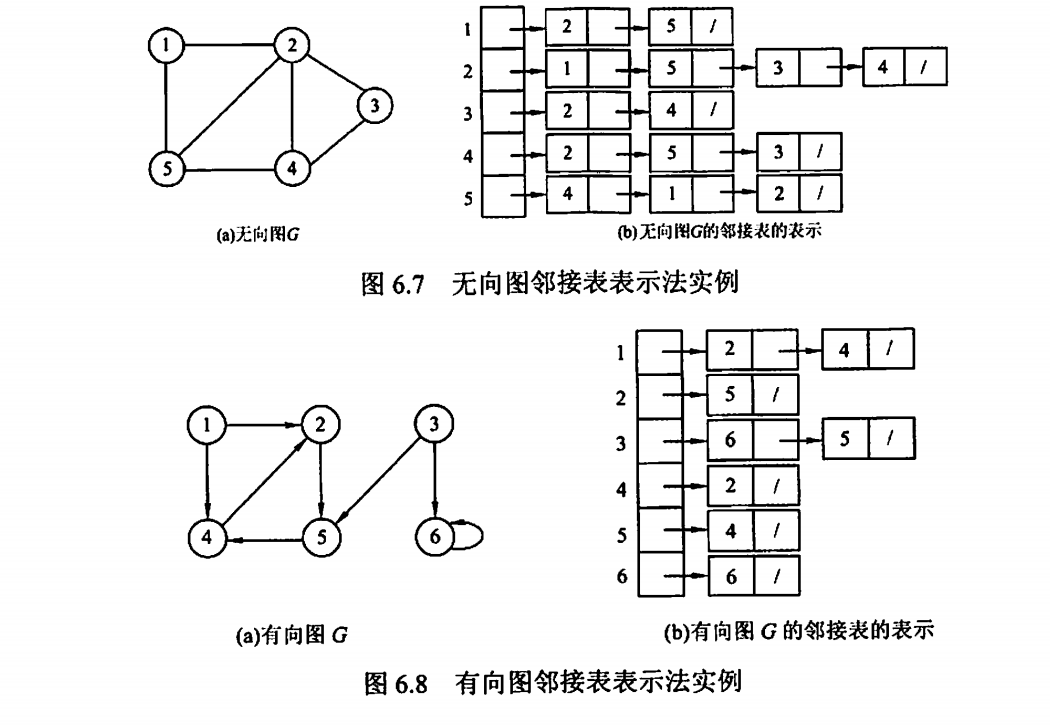
对于稀疏图,采用邻接表存储比较好
求度的时候需要遍历整个邻接表,为此引出了十字链表法:
十字链表法
十字链表法用于有向图
之前写过一篇:
https://www.cnblogs.com/lordtianqiyi/p/17739953.html
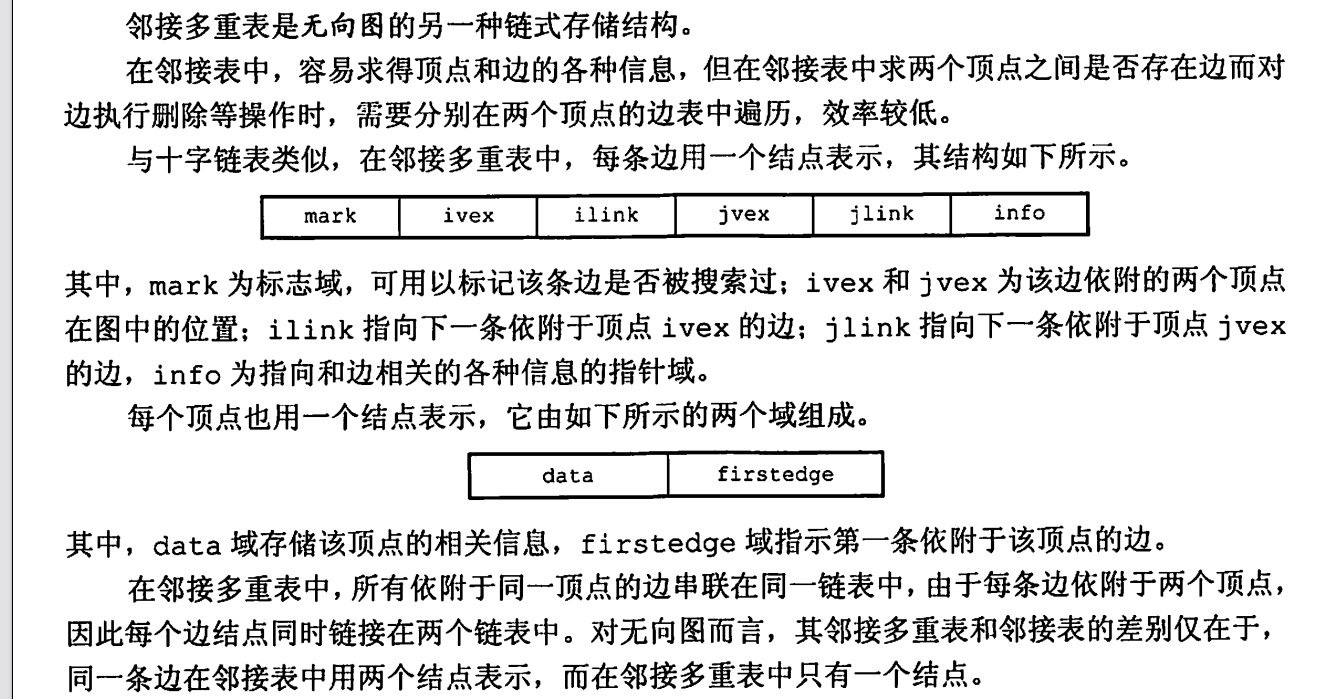
邻接多重表
邻接多重表的画法
比我想象中的简单
1、写出所有的边的关系
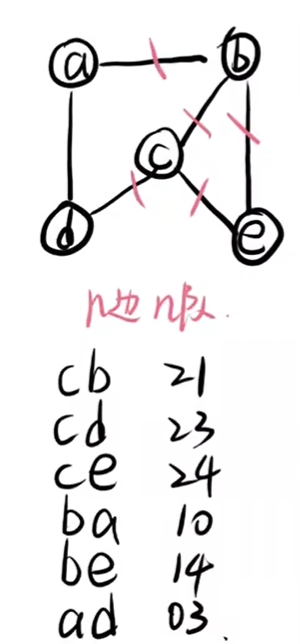
2、先画出顶点以及边
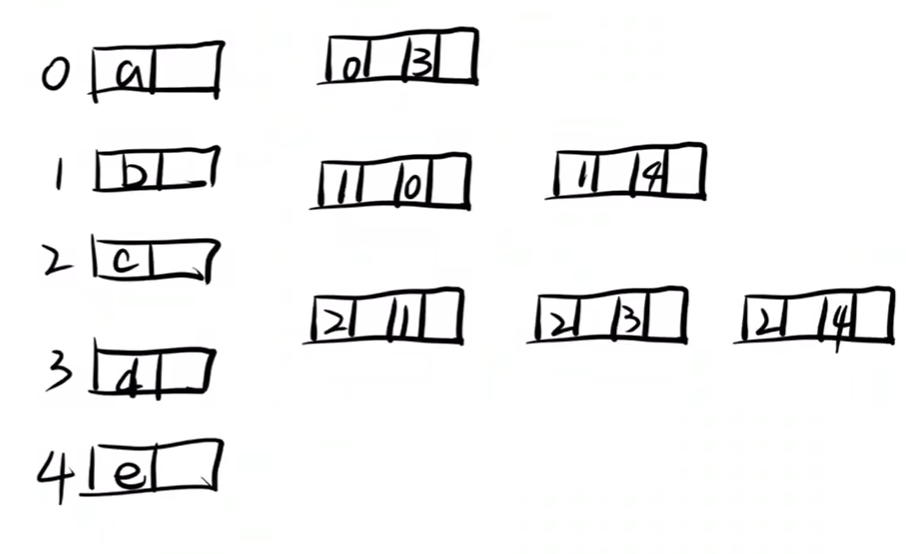
3、链接
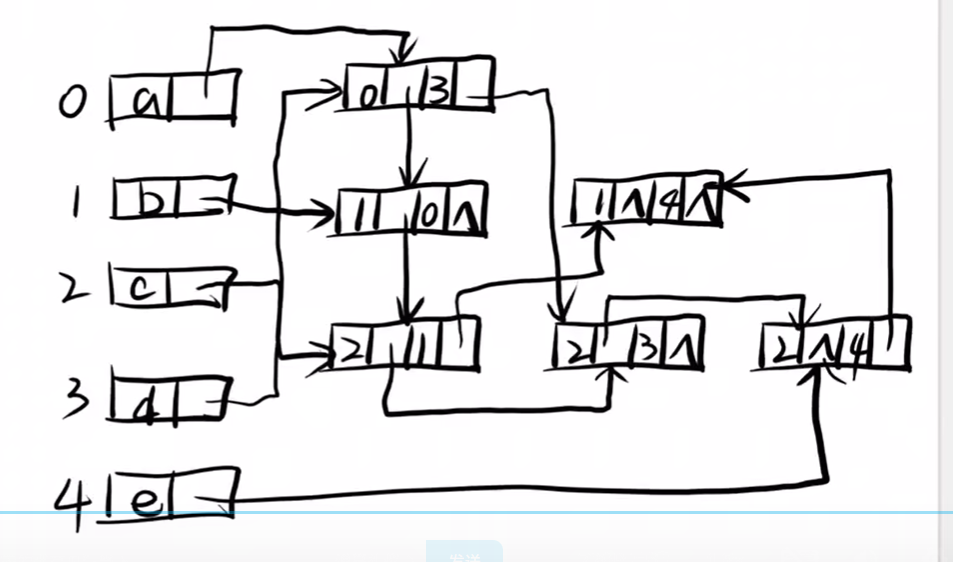
边的第二个数据项ilink代表指向下一条依附于顶点ivex的边
第四个数据项jlink指向下一个依附于顶点jvex的边
图的遍历
BFS
类似于二叉树的层序遍历
Dijkstra、prim算法就使用到了广度优先的思想
空间复杂度: O(V)
时间复杂度: O(V+E) // 邻接表法 或 O(V^2) // 邻接矩阵法
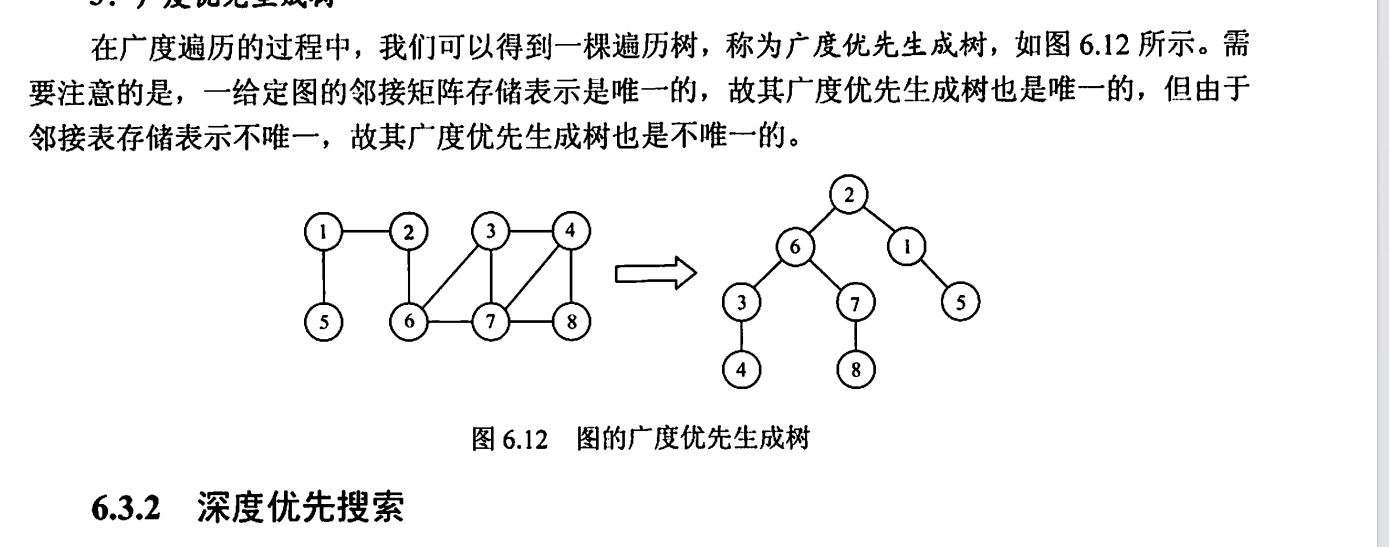
BFS---广度优先生成树
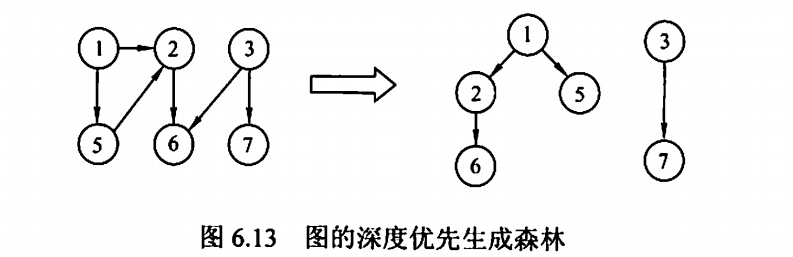
DFS
类型于二叉树的先序遍历
需要一个递归的栈,空间复杂度为O(V)
邻阶矩阵的时间复杂度是O(V^2)
邻阶表的时间复杂度是O(V+E)
深度优先遍历还可以判断是否存在回路
DFS---深度优先生成树
Prim算法
MST,最小生成树
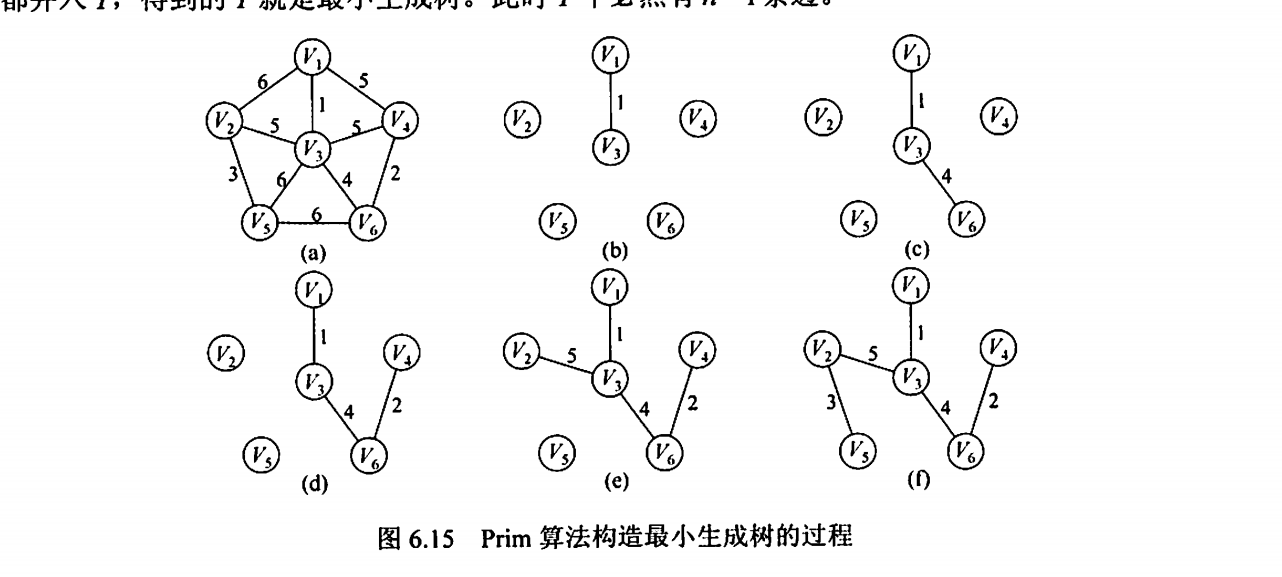
类似于Dijkstra算法
适合求稠密图的MST
时间复杂度: O(V^2)
Kruskal算法
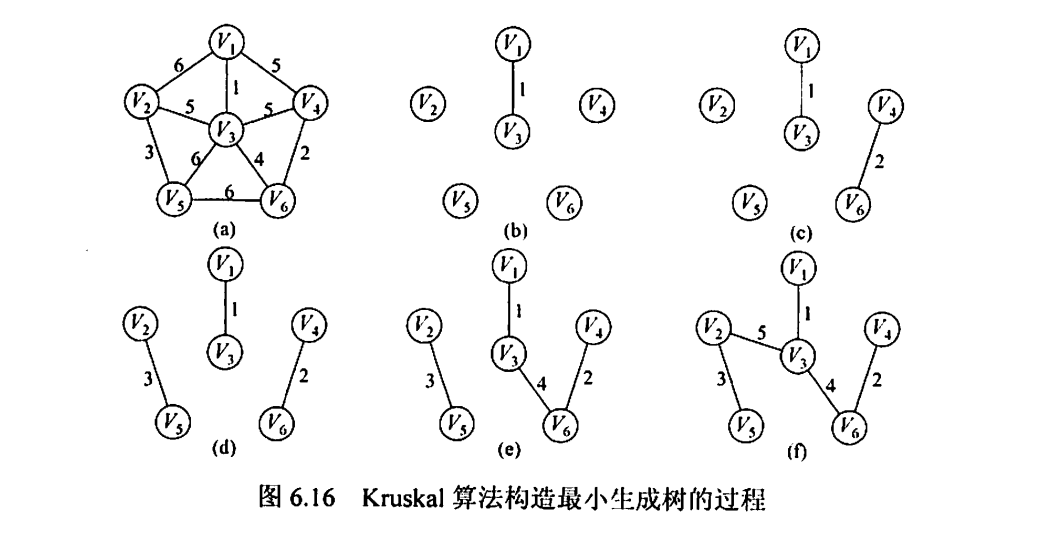
时间复杂度:O(ElogE)
适合求边稀疏顶点多的图的MST
Dijkstra算法求单源最短路径
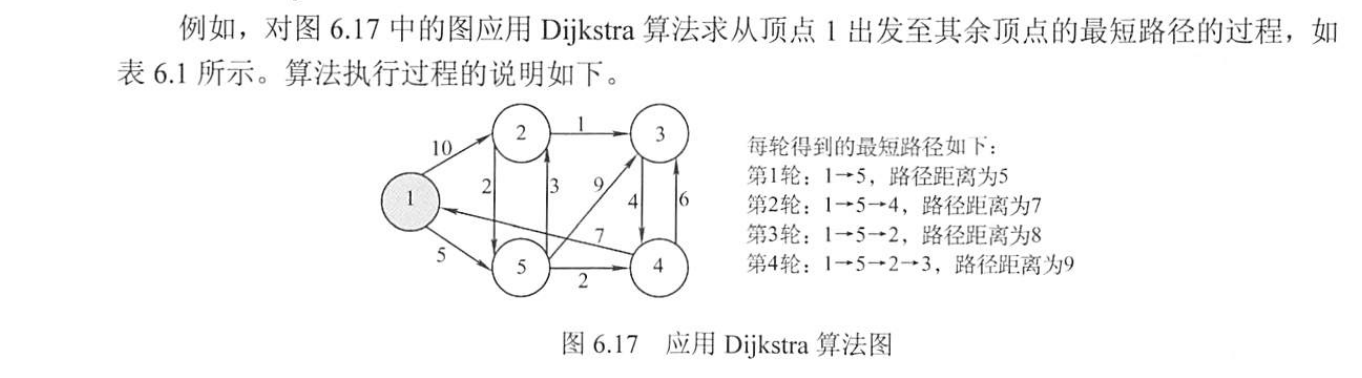
不适用于负权值
时间复杂度为O(V^2)
#include <iostream>
#include <cstring>
#include <algorithm>
using namespace std;
const int N=520;
int n,m;
int g[N][N]; // 存储点到点的距离,即边 ,或者说邻接矩阵
int dist[N]; // 存储点到原点的距离
bool st[N]; // 标记是否确定了最短路径
int dijkstra(){
memset(dist,0x3f,sizeof dist); // 为最后的 if(dist[n]==0x3f3f3f3f) return -1; 做铺垫
dist[1]=0; // 注意,这里 dist 是从1开始计数的 !!!
for(int i=0;i<n;i++){
int t=-1;
for(int j=1;j<=n;j++)
if(!st[j] && (t==-1 || dist[t]>dist[j])) // 找到距离原点最短距离的点 ,并附加标记 // 有点贪心的思想
t=j;
st[t]=true; // 附加标记,即最短路径点,收录到最短路径中
for(int j=1;j<=n;j++)
dist[j] = min(dist[j],dist[t]+g[t][j]); //依次更新每个点所到相邻的点路径值 // dist[t] <=> 0->t | g[t][j] <=> t->j | ===> dist[t]+g[t][j] <=> 0->j
}
if(dist[n]==0x3f3f3f3f) return -1;
return dist[n];
}
int main(){
cin >> n >> m;
memset(g,0x3f,sizeof g); // 为 g[a][b] = min(g[a][b],x); 做铺垫
while(m--){
int a,b,x;
scanf("%d%d%d",&a,&b,&x);
g[a][b] = min(g[a][b],x);
}
int t=dijkstra();
printf("%d\n",t);
return 0;
}
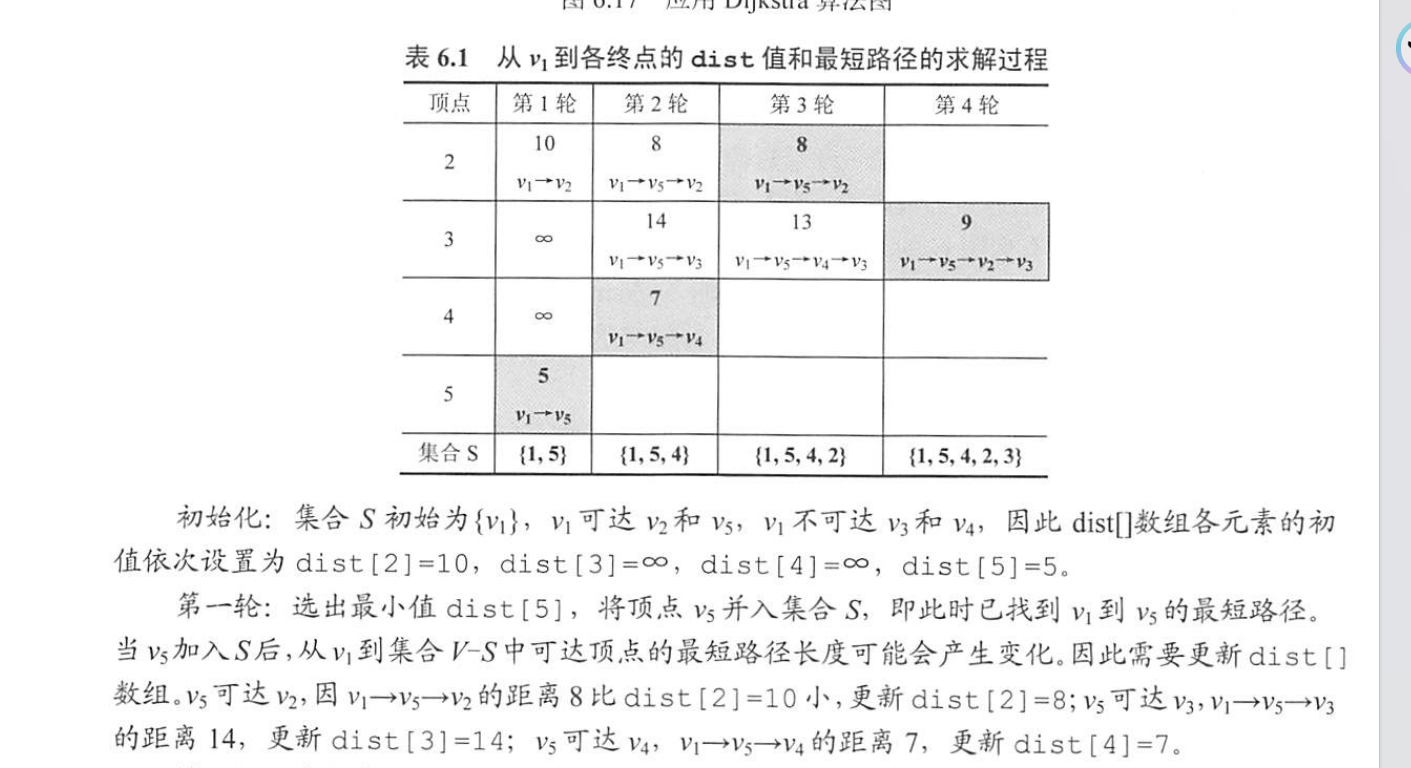
Dijkstra 算法思路
1、每次从未标记的节点中选择距离出发点最近的节点,标记,收录到最优路径集合中。
2、计算刚加入节点A的邻近节点B的距离(不包含标记的节点)
若(节点A的距离+节点A到节点B的边长)<节点B的距离,就更新节点B的距离和前面点。
3、反复循环
Floyd算法求多源最短路径
时间复杂度为O(V^3)
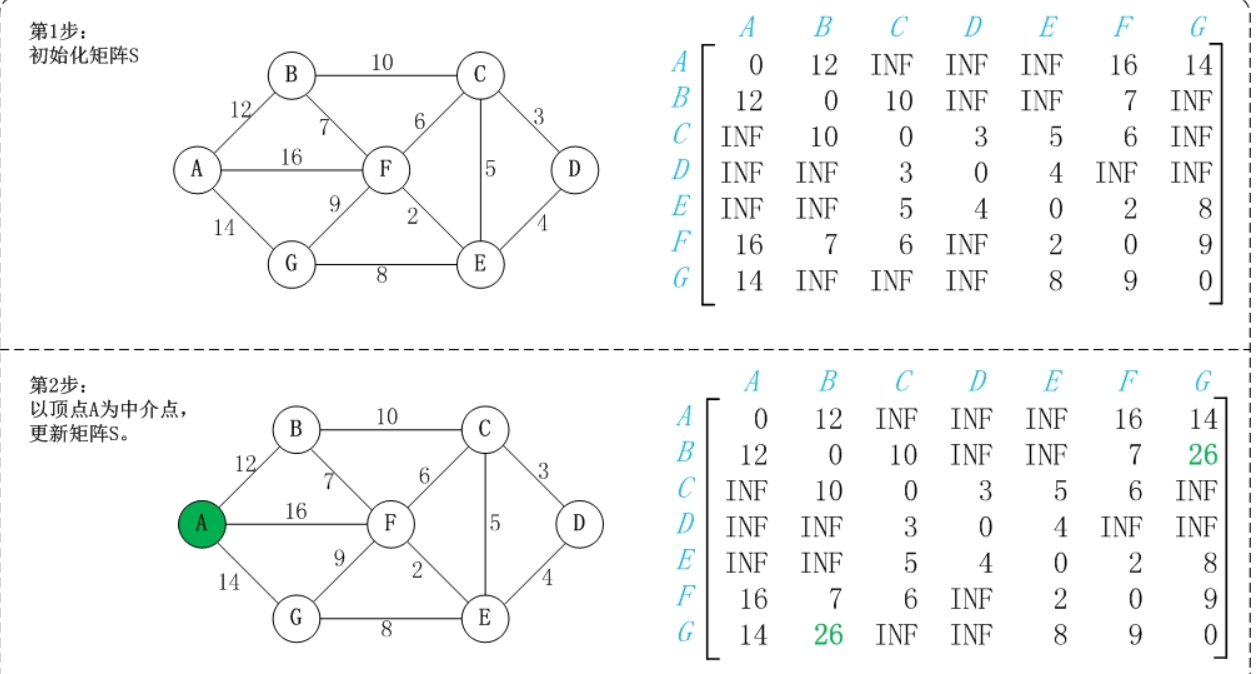
算法思想:
- floyd 算法遍历每个点,每个点都会找到从该点到其他所有点的最短路径,我们从一个点来入手研究,比如我们选取点 0
- 选取点 0后,遍历除0外的所有点,每遍历一个点就把该点作为中轴节点x,并比较 所有的A[i][x] + A[x][0] 与 A[i][0]的大小,若前者小,则更新A_i中最短路径的大小,且更新 Path_i中的 记录的中轴节点
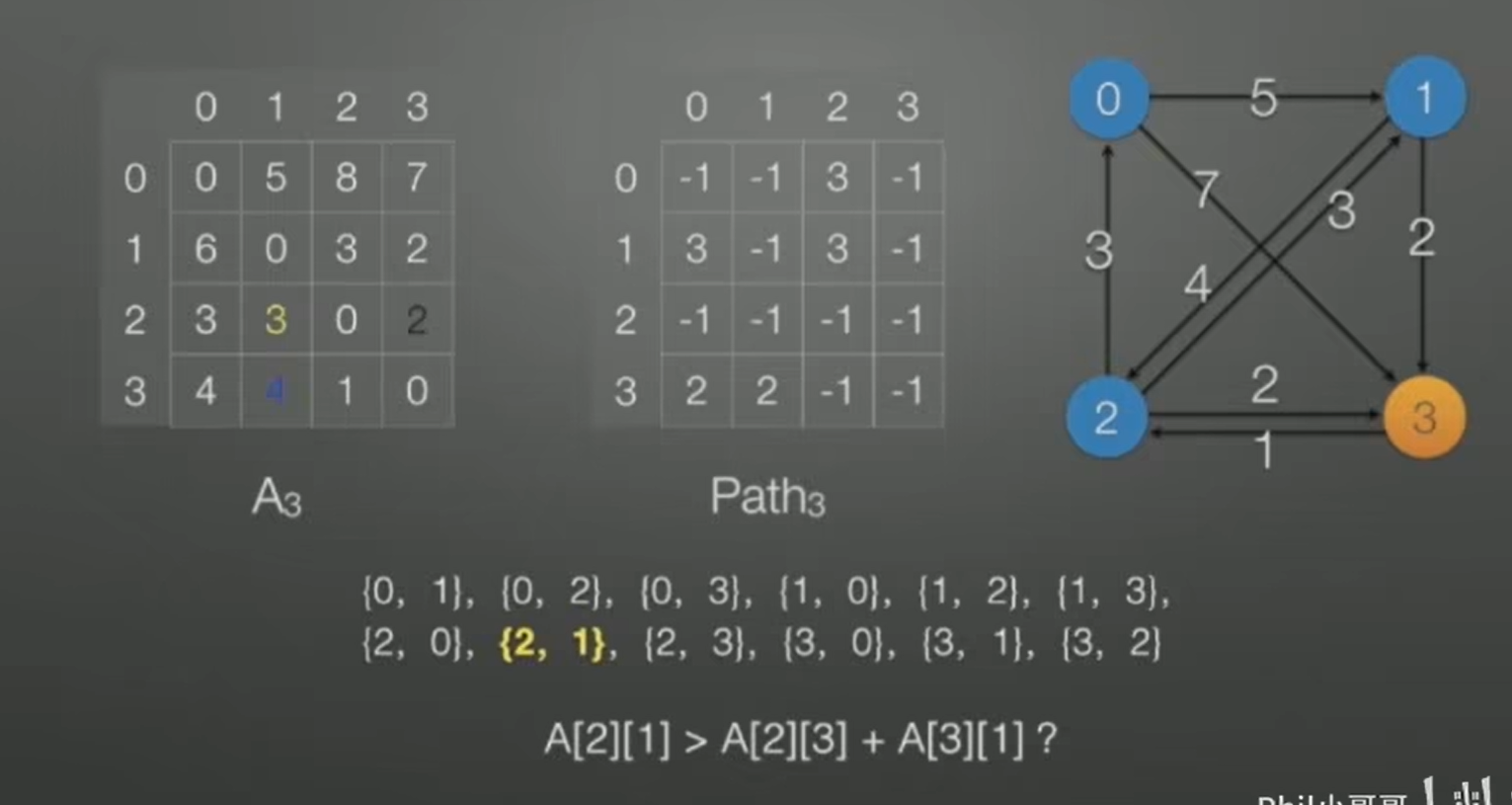
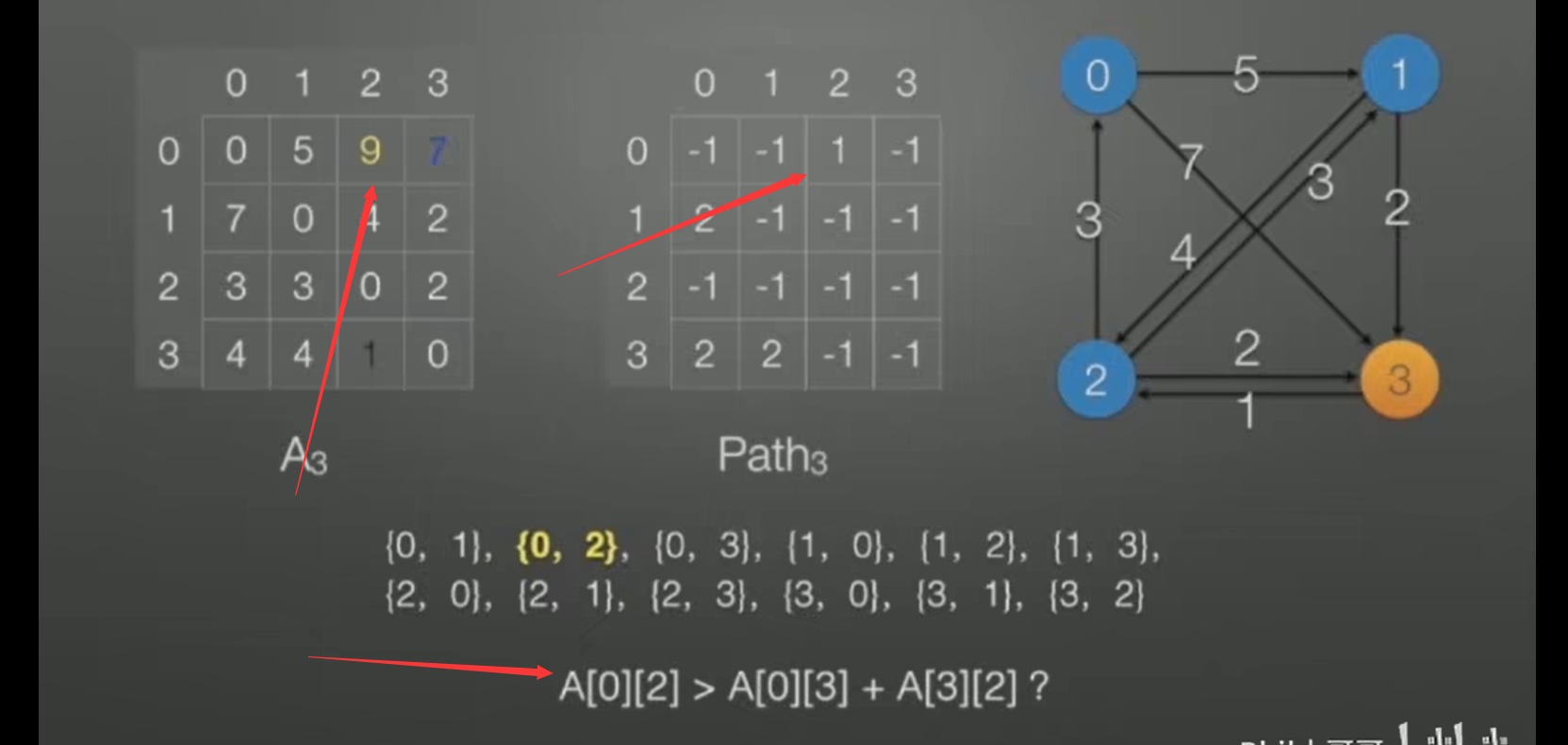
Path_i 表的作用: 这个表记录所有最短路径的中轴节点如" Path[0][2] = 3" 代表的含义是: A[0][2] > A[0][3] + A[3][2] ,也就是说以3为转轴的时候 节点0到2 的直接距离小于先从 0到3,再从3到2的距离和
当然,上图中是已经比较后且修改过的图,下图是比较前的图:
/*
* floyd最短路径。
* 即,统计图中各个顶点间的最短路径。
*
* 参数说明:
* G -- 图
* path -- 路径。path[i][j]=k表示,"顶点i"到"顶点j"的最短路径会经过顶点k。
* dist -- 长度数组。即,dist[i][j]=sum表示,"顶点i"到"顶点j"的最短路径的长度是sum。
*/
void floyd(Graph G, int path[][MAX], int dist[][MAX])
{
int i,j,k;
int tmp;
// 初始化
for (i = 0; i < G.vexnum; i++)
{
for (j = 0; j < G.vexnum; j++)
{
dist[i][j] = G.matrix[i][j]; // "顶点i"到"顶点j"的路径长度为"i到j的权值"。
path[i][j] = j; // "顶点i"到"顶点j"的最短路径是经过顶点j。
}
}
// 计算最短路径
for (k = 0; k < G.vexnum; k++)
{
for (i = 0; i < G.vexnum; i++)
{
for (j = 0; j < G.vexnum; j++)
{
// 如果经过下标为k顶点路径比原两点间路径更短,则更新dist[i][j]和path[i][j]
tmp = (dist[i][k]==INF || dist[k][j]==INF) ? INF : (dist[i][k] + dist[k][j]);
if (dist[i][j] > tmp)
{
// "i到j最短路径"对应的值设,为更小的一个(即经过k)
dist[i][j] = tmp;
// "i到j最短路径"对应的路径,经过k
path[i][j] = path[i][k];
}
}
}
}
// 打印floyd最短路径的结果
printf("floyd: \n");
for (i = 0; i < G.vexnum; i++)
{
for (j = 0; j < G.vexnum; j++)
printf("%2d ", dist[i][j]);
printf("\n");
}
}
这个算法还是比较简单的,需要注意的是,floyd算法每次选取一个中介点,然后进行两重循环
拓扑排序
AOV网: 顶点表示活动的网络
拓扑排序要求:
①每个顶点出现且只出现一次。
②若顶点A在序列中排在顶点B的前面,则在图中不存在从顶点B到顶点A的路径。
拓扑排序可以判断有无环
由于AOV网中各顶点的地位平等,每个顶点编号是人为的,因此可以按拓扑排序的结果重新编号,生成AOV网的新的邻接存储矩阵,这种邻接矩阵可以是三角矩阵:但对于一般的图来说,若其邻接矩阵是三角矩阵,则存在拓扑序列:反之则不一定成立。
邻接表时间复杂度为O(V+E),临界矩阵为:O(V^2)
关键路径
AOE网
求关键路径
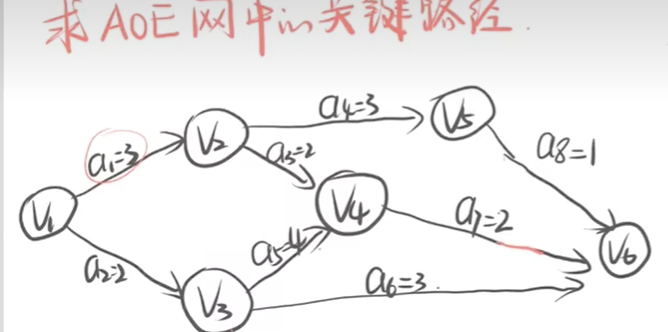
1、事件最早发生时间
拓扑排序
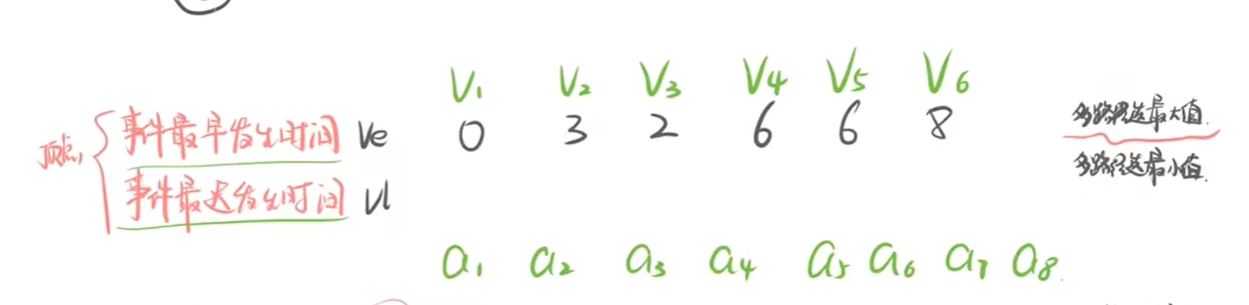
2、事件最迟发生时间
逆拓扑排序

3、活动最早开始时间 ei

4、活动最晚开始时间 li

5、求时间余量 li-ei
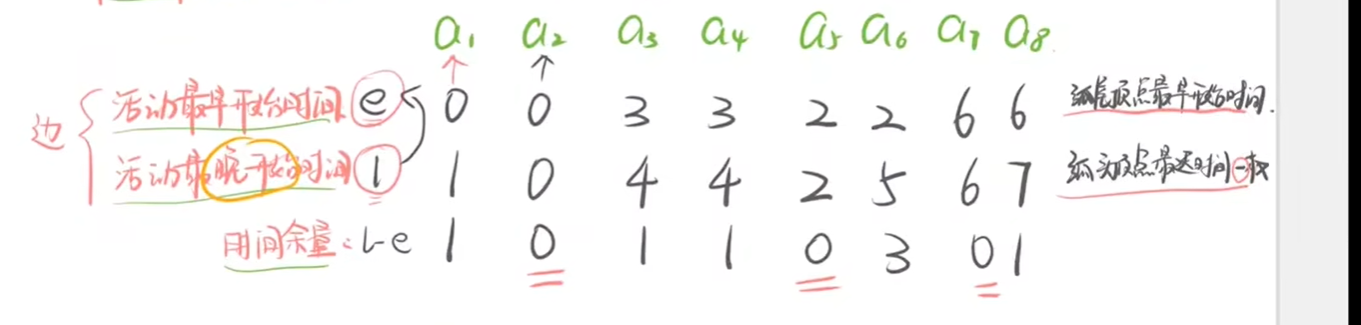
时间余量为0的点为关键路径
中缀表达式转有向无环图
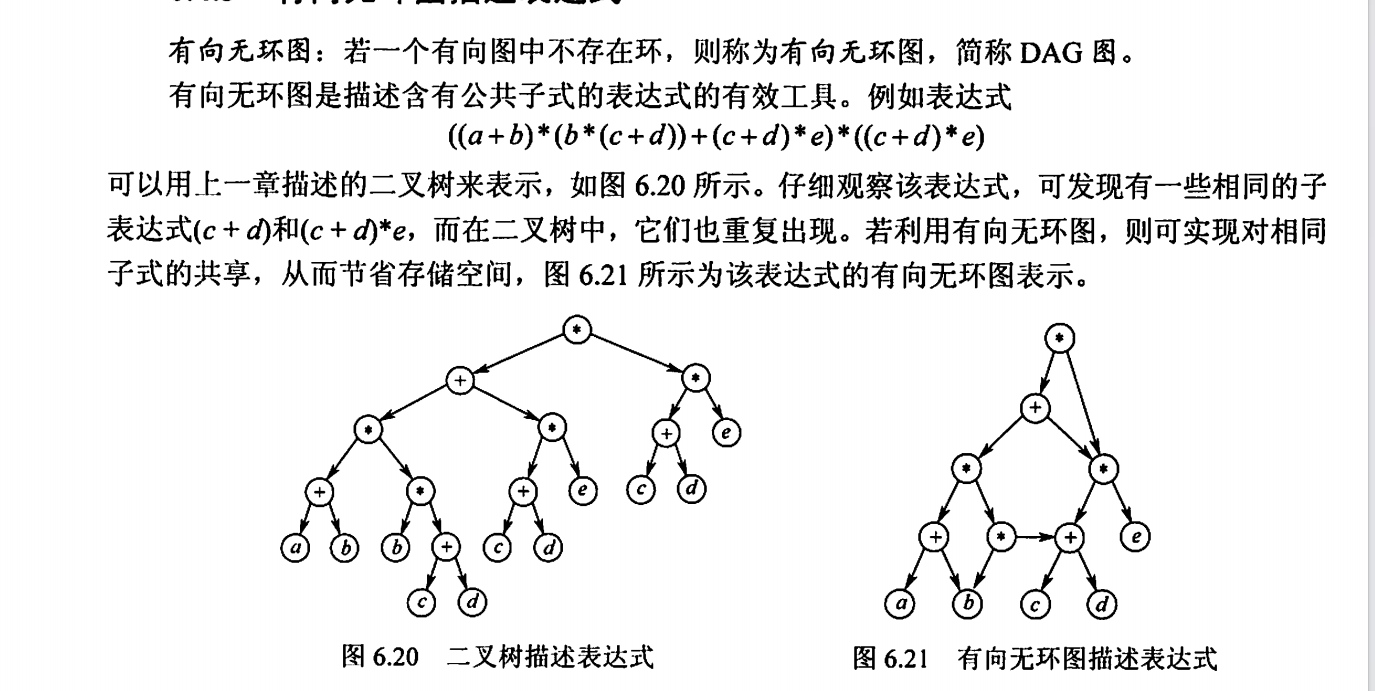

我的感悟是先按中序建树,然后再去边
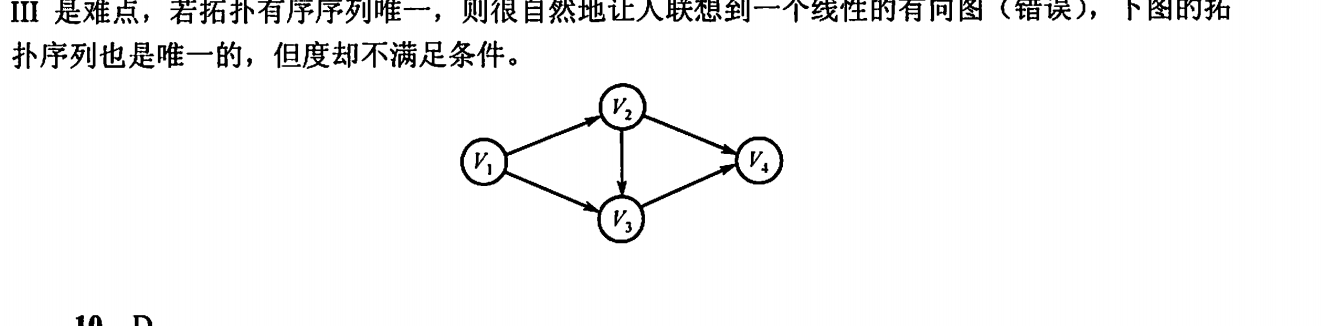
经典错题---6.4
若有向图的拓扑有序序列唯一,则图中每个顶,点的入度和出度最多为1
这句话是错误的
在图G的最小生成树G中,某条边的权值可能会超过未选边的权值
这是因为权值小的图不一定连通

总结
1、在路径序列中,顶点不重复出现的路径称为简单路径。
2、dfs算法与bfs算法发时间复杂度与空间复杂度分析
空间复杂度: O(V)
时间复杂度: O(V+E) // 邻接表法 或 O(V^2) // 邻接矩阵法
3、prim,kruskal,Dijkstra,floyd算法的时间复杂度
prim: O(v^2)
kruskal : O(eloge)
Dijkstra : O(v^2)
floyd : O(v^3)
4、Dijkstra 算法思路(真题常考,并且算法比prim与kruskal复杂一点,故专门记录)
-
每次从未标记的节点中选择距离出发点最近>的节点,标记,收录到最优路径集合中。
-
计算刚加入节点A的邻近节点B的距离(不包含标记的节点)
若(节点A的距离+节点A到节点B的边长)<节点B的距离,就更新节点B的距离和前面点。
-
反复循环
题目中会问,当找到第n个最短路径时,dist数组的内容是多少,需要注意的是,当找到第n个最短路口路径后,需要更新一次dist,再回答题目