目标检测YOLO系列
YOLOv1
-
blogs1:YOLOv1算法理解
-
blogs2:<机器爱学习>YOLO v1深入理解
YOLOv1总结:
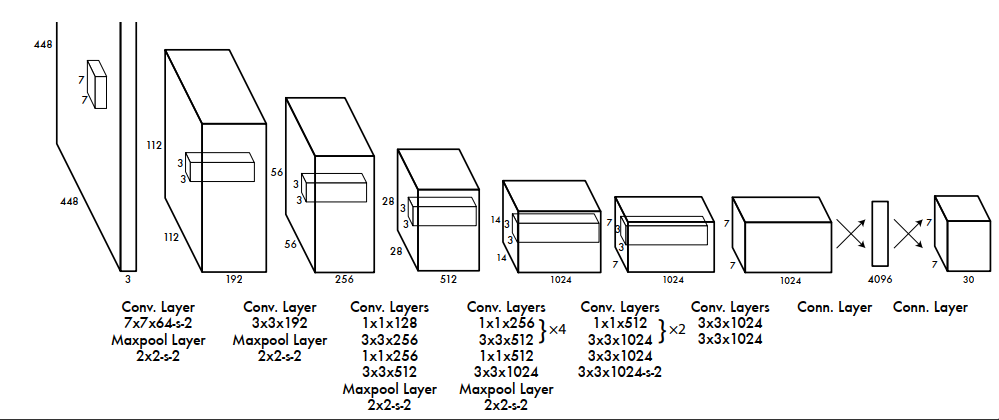
- 网络结构:
- 激活函数:

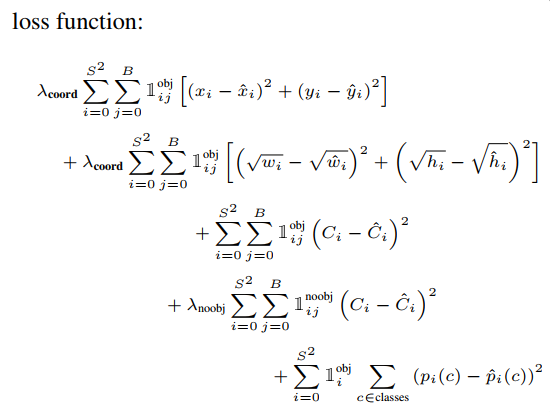
- 损失函数:
-
输入和输出:input:448x448x3 output:7x7x30
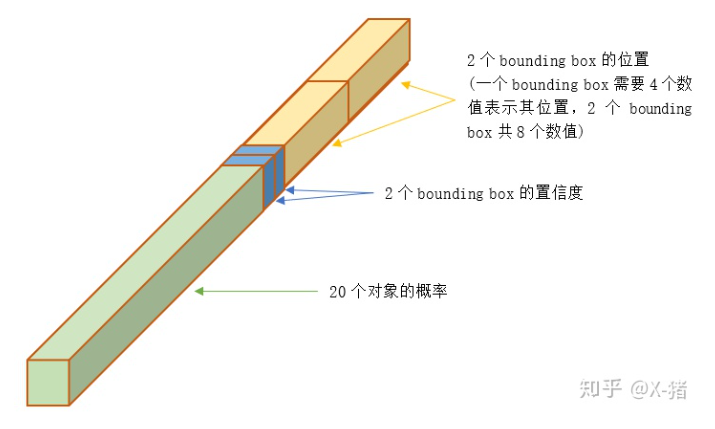
output的30:
Iou计算只在训练阶段,在测试阶段不进行IoU计算
-
训练:训练中采用了drop out和数据增强(data augmentation)来防止过拟合
-
NMS(非极大值抑制):为了从中提取出最有可能的那些对象和位置,YOLO采用NMS(Non-maximal suppression,非极大值抑制)算法。其核心思想是:选择得分最高的作为输出,与该输出重叠的去掉,不断重复这一过程直到所有备选处理完。
YOLOv2
-
blogs:目标检测|YOLOv2原理与实现
YOLOv2总结:
-
Batch Normalization
Batch Normalization可以提升模型收敛速度,而且可以起到一定正则化效果,降低模型的过拟合。 每个卷积层后面都添加了Batch Normalization层,不再使用droput。 -
High Resolution Classifier(高分辨率分类器)
不同于yolov1在采用224x224分类模型预训练后,将分辨率增加至448x448的方法,并使用这个高分辨率在检测数据集上finetune。直接切换分辨率,检测模型可能难以快速适应高分辨率。 YOLOv2增加了在ImageNet数据集上使用448x448输入来finetune分类网络这一中间过程(10 epochs),这可以使得模型在检测数据集上finetune之前已经适用高分辨率输入。 -
Convolutional With Anchor Boxes(带锚框的卷积)
移除了YOLOv1中的全连接层而采用了卷积和anchor boxes(先验框)来预测边界框。 采用416x416输入大小,通过下采样总步长为32得到13x13的特征图。 YOLOv1只能预测98个边界框(7x7x2),而YOLOv2使用anchor boxes之后可以预测上千个边界框(13x13xnum_anchors),召回率大大提高。 -
Dimension Clusters
使用聚类算法生成先验框 -
New Network: Darknet-19
YOLOv2采用了一个新的基础模型(特征提取器),称为Darknet-19,包括19个卷积层和5个maxpooling层。
YOLOV3
- paper:YOLOv3: An Incremental Improvement
- code:U版yolov3
- code2:mmdetection实现的代码
- blogs1:睿智的目标检测26——Pytorch搭建yolo3目标检测平台
- blogs2:YOLO v3网络结构分析
- video:YOLOV3理论讲解
YOLOv3总结:
-
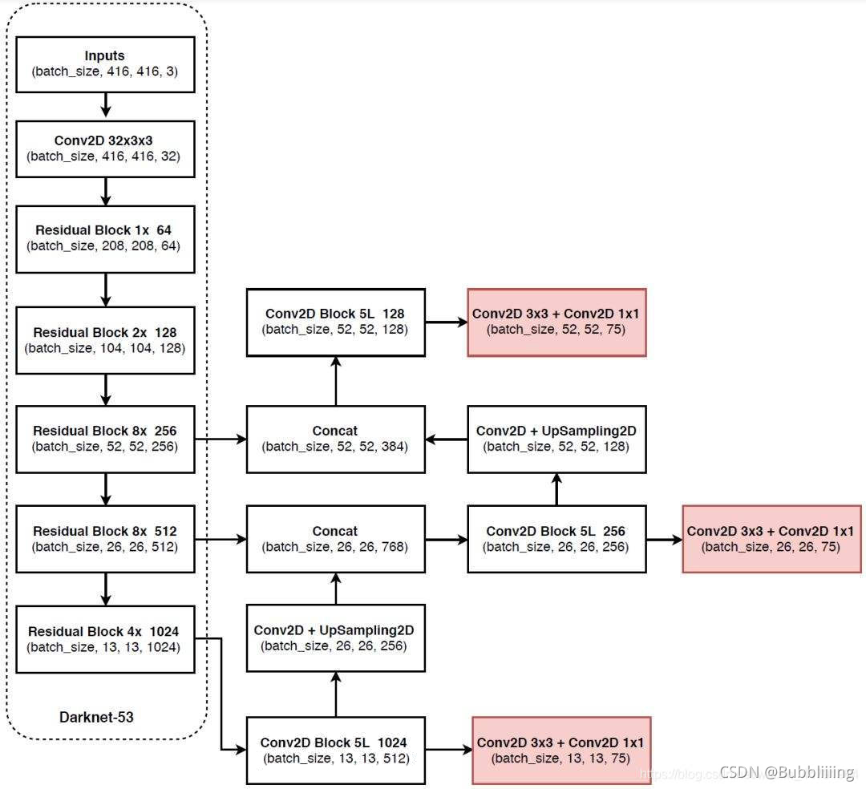
Backbones
DarkNet53, 网络结构如下:
-
Neck
FPN(特征金字塔) -
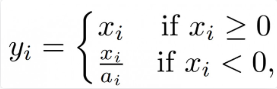
激活函数
LeakyReLU
-
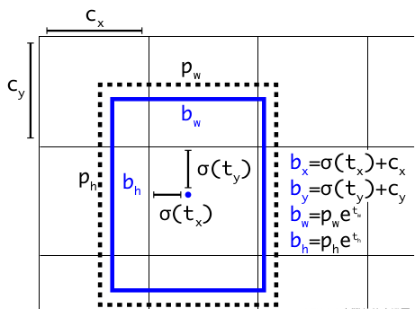
损失函数
目标类别损失/目标置信度损失 --> 二值交叉熵损失(Binary Cross Entyopy) 目标定位损失 --> Sum of Squared Error Loss(只有正样本才有目标定位损失) L(loc) = sum(sigmod(tx-gx)**2 + sigmod(ty-gy)**2 + (tw-gw)**2 + (th-gh)**2)目标定位损失:

YOLOV4
- paper:YOLOv4: Optimal Speed and Accuracy of Object Detection
- code1:WongKinYiu/PyTorch_YOLOv4 与u版yolov3/5格式相同
- code2:bubbliiiing/yolov4-pytorch 代码比较好理解
- blogs1:b站up主霹雳吧啦Wz yolov4讲解博客
- blogs2:Bubbliiiing的博客
- video1:b站up主霹雳吧啦Wz yolov4讲解视频
YOLOv4总结:
-
数据处理部分
Mosaic数据增强 mosaic利用了四张图片进行拼接,增加学习样本的多样性,丰富检测物体的背景。 -
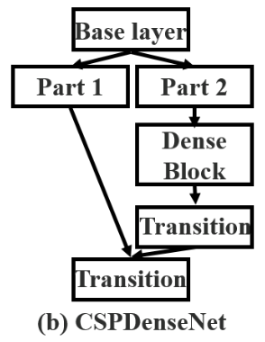
Backbones部分
使用 CSPDarkNet53 主干网络替换 DarkNet53 CSPDarknet53 将CSP结构融入了Darknet53中 CSP结构的好处:减少网络的计算量以及对显存的占用,同时保证网络的能力不变或者略微提升。
-
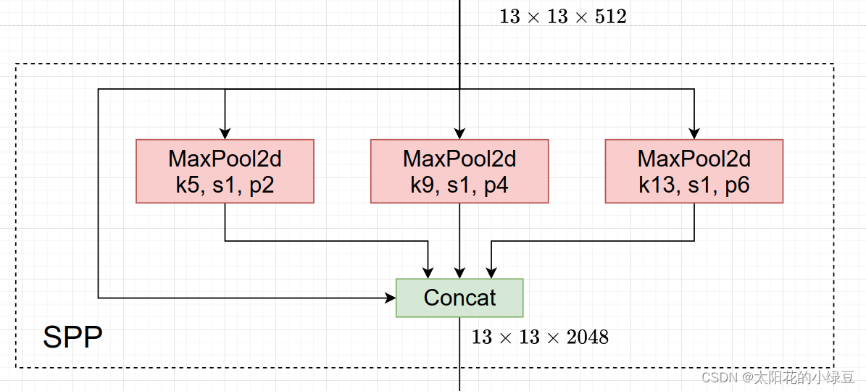
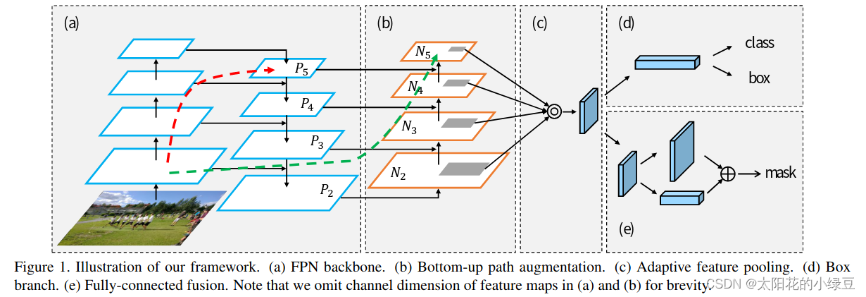
Neck部分
SPP 空间金字塔池化,就是将特征层分别通过一个池化核大小为5x5、9x9、13x13的最大池化层,然后在通道方向进行concat拼接在做进一步融合,这样能够在一定程度上解决目标多尺度问题。 PAN 结构其实就是在 FPN(特征金字塔)(从顶到底信息融合)的基础上加上了从底到顶的信息融合SPP部分:
PAN部分(b):
-
Head部分
和YOLOv3的head部分一样 -
正负样本分配匹配部分
-
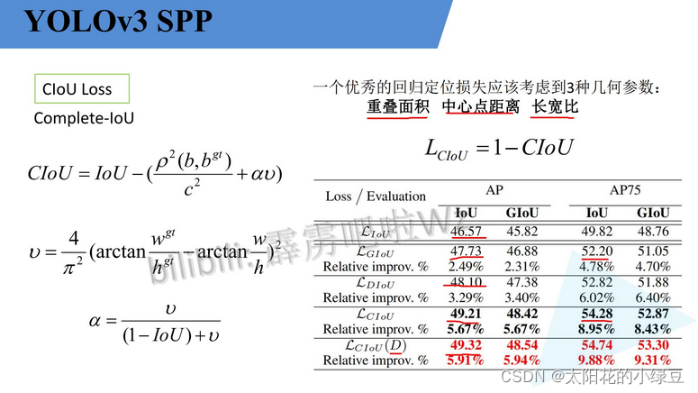
损失函数部分
在YOLOv3中定位损失采用的是MSE(均方误差)损失,在YOLOv4中采用的是CIoU损失。
-
激活函数
Mish激活函数 -
其他优化
Class label smoothing(标签平滑策略) 学习率余弦退火衰减
YOLOV5
- code:U版yolov5
- blogs1: b站up主霹雳吧啦Wz yolov5讲解博客比较详细
- video1:b站up主霹雳吧啦Wz yolov5讲解视频
YOLOv5总结:
-
数据处理
yolov5提供的数据增强技术有: 1.Mosaic 将四张图片拼成一张图片 2.Copy paste 将部分目标随机的粘贴到图片中,前提是数据要有segments数据才行,即每个目标的实例分割信息 3.Random affine 随机进行仿射变换,只使用了Scale(缩放)和Translation(平移) 4.MixUp 将两张图片按照一定的透明度融合在一起 -
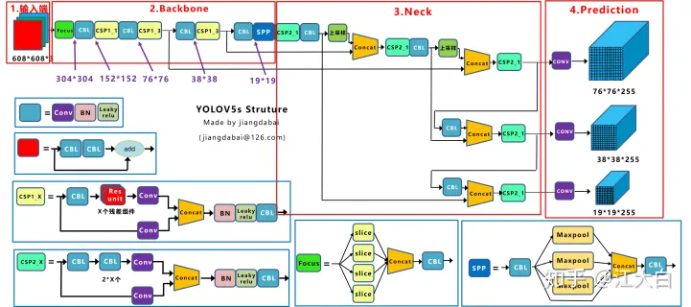
Backbones部分
v6版本之后,将网络的第一层(Focus模块)换成了一个6x6大小的卷积层。 -
Neck部分
SPP -> SPPF PAN -> New CSP-PAN -
head部分
yolov3 head -
损失函数
Classes loss,分类损失,采用的是BCE loss,注意只计算正样本的分类损失。 Objectness loss,置信度误差,obj损失,采用的依然是BCE loss,注意这里的obj指的是网络预测的目标边界框与GT Box的CIoU。 Location loss,定位损失,采用的是CIoU loss,注意只计算正样本的定位损失。 -
其他
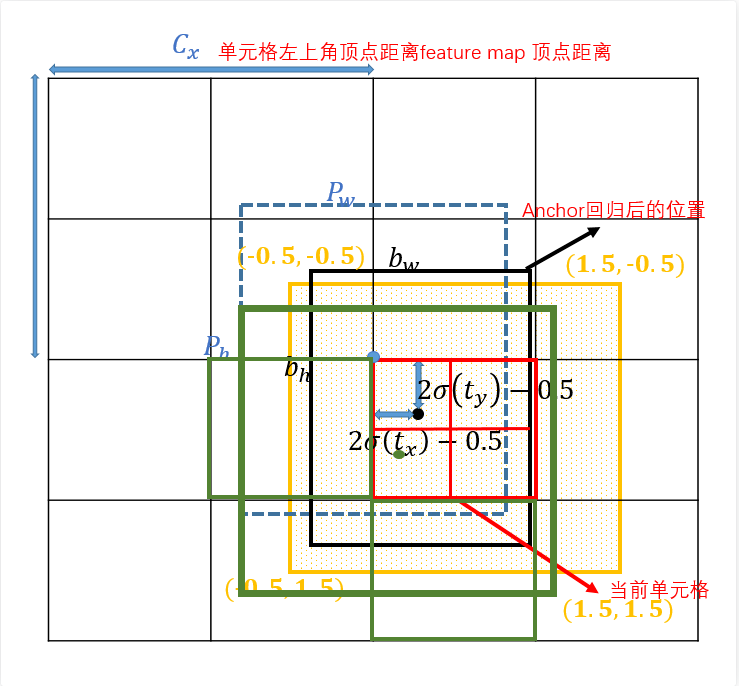
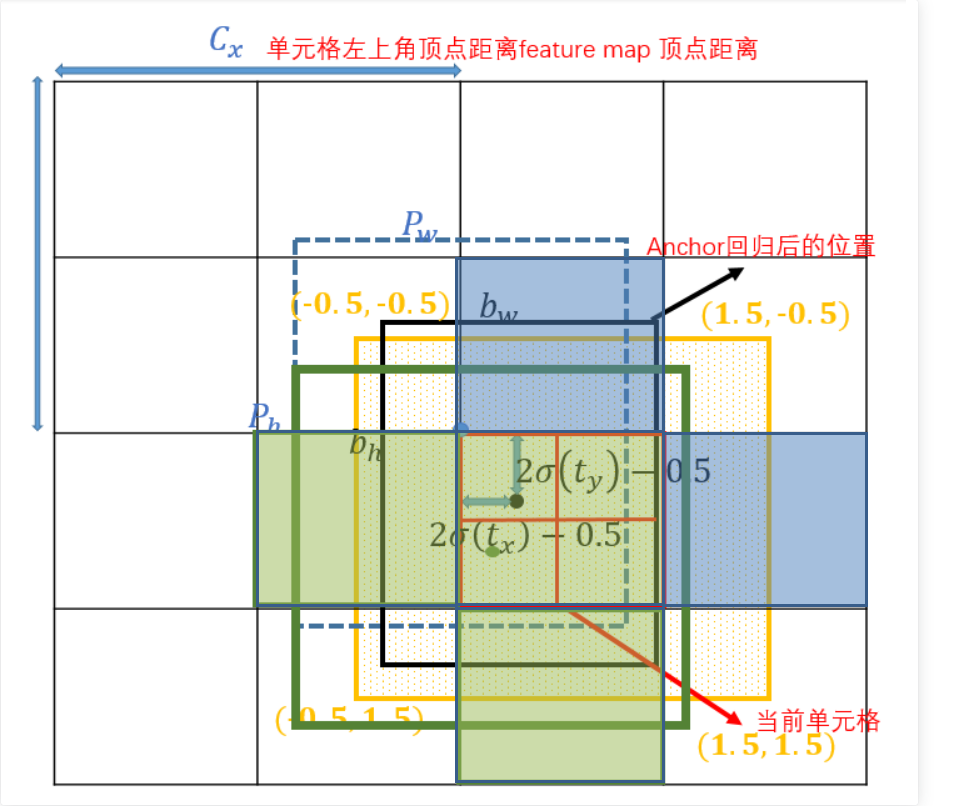
消除Grid敏感度 bx = (2*sigmod(tx) - 0.5) + cx by = (2*sigmod(ty) - 0.5) + cy 那么就将原来的取值范围有[0, 1]变化到[-0.5, 1.5],也为后面使用相邻的网格预测点作为正样本奠定基础 同时: bw = pw * (28sigmod(tw))**2 bh = ph * (28sigmod(th))**2 防止梯度爆炸,将范围调整到(0,4)也为后面的正负样本分配奠定基础
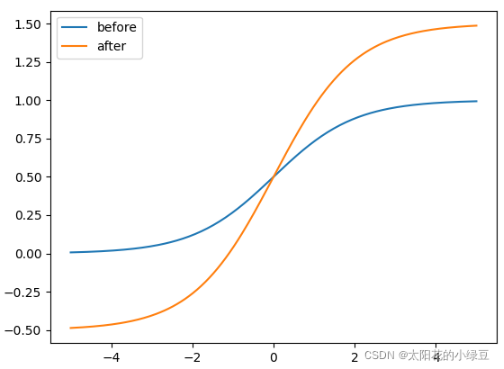
)
-
正负样本匹配
yolov5基于anchor based,在开始训练前,会基于训练集中gt(ground truth 框),通过k-means聚类算法,先验获得9个从小到大排列的anchor框。先将每个gt与9个anchor匹配(以前是IOU匹配,yolov5中变成shape匹配,计算gt与9个anchor的长宽比,如果长宽比小于设定阈值,说明该gt和对应的anchor匹配), 如上图为yolov5的网络架构,yolov5有三层网络,9个anchor, 从小到大,每3个anchor对应一层prediction网络,gt与之对应anchor所在的层,用于对该gt做训练预测,一个gt可能与几个anchor均能匹配上。所以一个gt可能在不同的网络层上做预测训练,大大增加了正样本的数量,当然也会出现gt与所有anchor都匹配不上的情况,这样gt就会被当成背景,不参与训练,说明anchor框尺寸设计的不好。 在训练过程中怎么定义正负样本呢,因为yolov5中负样本不参与训练,所以要增加正样本的数量。gt框与anchor框匹配后,得到anchor框对应的网络层的grid,看gt中心点落在哪个grid上,不仅取该grid中和gt匹配的anchor作为正样本,还取相邻的的两个grid中的anchor为正样本。
如上图所示,绿色的gt框中心点落在红色grid的第三象限里,那不仅取该grid,还要取左边的grid和下面的grid,这样基于三个grid和匹配的anchor就有三个中心点位于三个grid中心点,长宽为anchor长宽的正样本,同时gt不仅与一个anchor框匹配,如果跟几个anchor框都匹配上,所以可能有3-27个正样本,增大正样本数量。
补充:正负样本匹配
YOLOV6
- blog1: https://mp.weixin.qq.com/s/DFSROue8InARk-96I_Kptg
- blog2: https://mp.weixin.qq.com/s/RrQCP4pTSwpTmSgvly9evg(美团官方解读)
- blog3: https://zhuanlan.zhihu.com/p/353697121 (Repvgg解读)
- code: https://github.com/meituan/YOLOv6
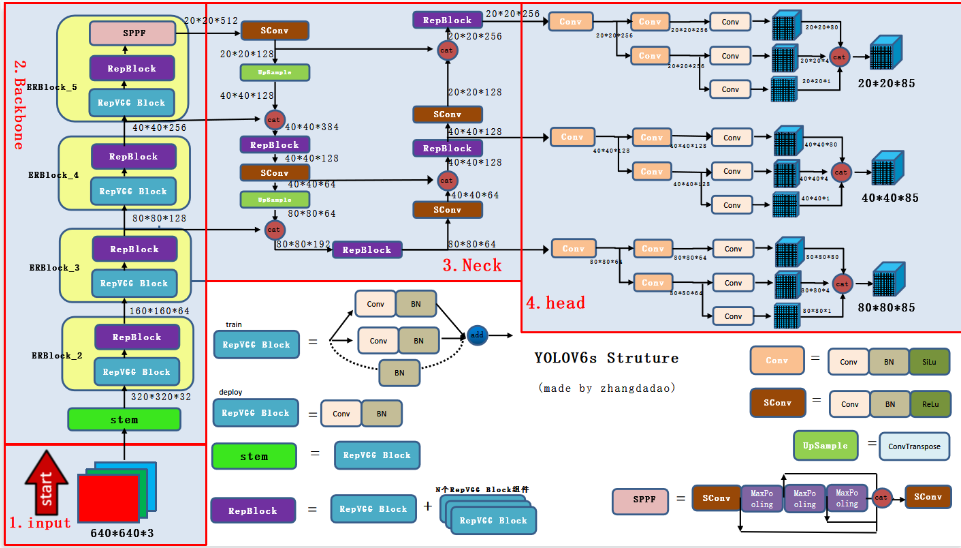
模型整体框架:
yolov6的正负样本匹配
- 参考: https://mp.weixin.qq.com/s/nhZ3Q1NHm3op8abdVIGmLA
- yolov6的正负样本匹配策略同yolox,yolovx因为是anchor free,anchor free因为缺少先验框这个先验知识,理论上应该是对场景的泛化性更好,同时参见旷视的官方解读:Anchor 增加了检测头的复杂度以及生成结果的数量,将大量检测结果从NPU搬运到CPU上对于某些边缘设备是无法容忍的。
- yolov6中的正样本筛选,主要分成以下几个部分:
- 基于两个维度来粗略筛选;
- 基于simOTA进一步筛选。
- 具体步骤如下
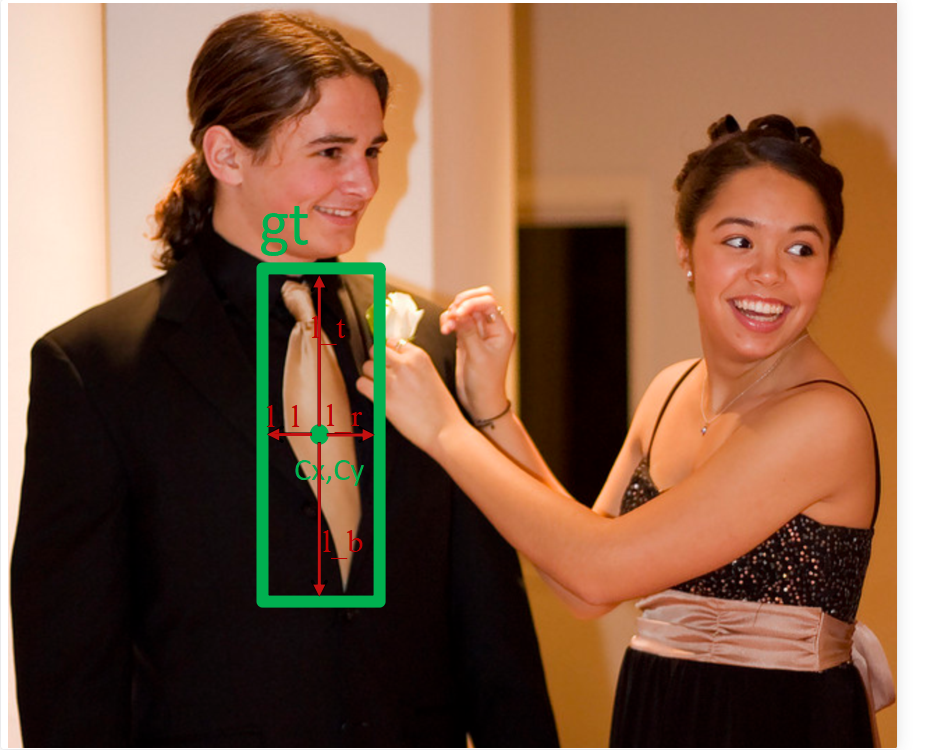
tie标签的gt如图所示,找到gt的中心点(Cx,Cy),计算中心点到左上角的距离(l_l,l_t),右下角坐标(l_r,l_b),然后从两步筛选正样本:
1.第一步粗略筛选第一个维度是如果grid的中心点落在gt中,则认为该grid所预测的框为正样本,如图所示的红色和橙色部分,第二个维度是以gt的中心点所在grid的中心点为中心点,上下左右扩充2.5个grid步长范围内的grid,则默认该grid所预测的框为正样本,如图紫色和橙色部分。这样第一步筛选出31个正样本(注:这里单独一层的正样本,yolov6有三个网络层,分别计算出各层的正样本,并叠加)。
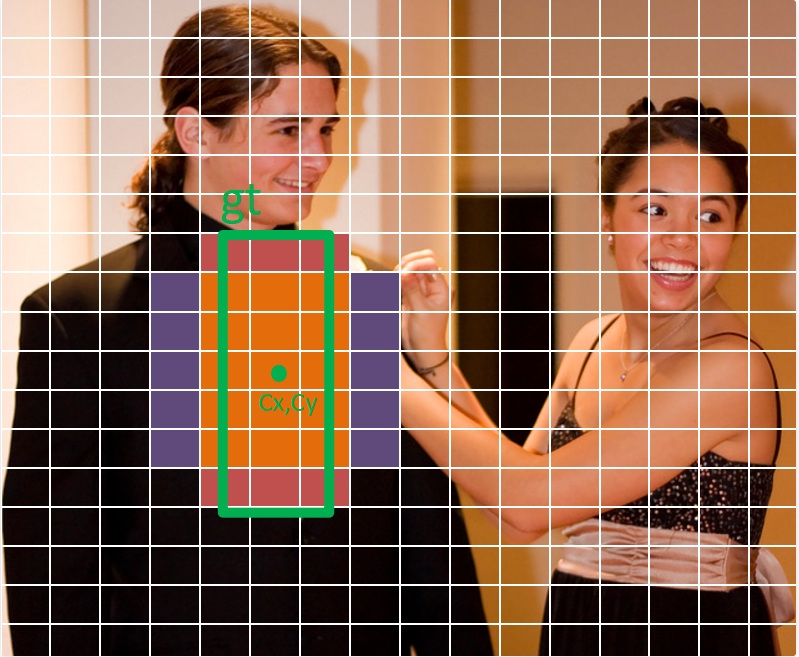
2.通过SimOTA进一步筛选:SimOTA是基于OTA的一种优化,OTA是一种动态匹配算法,具体参见旷视官方解读
SimOTA流程如下:
- 计算初筛正样本与gt的IOU,并对IOU从大到小排序,取前十之和并取整,记为b(用来决定改gt分配多少个正样本)。
- 计算初筛正样本的cos代价函数,将cos代价函数从小到大排列,取cos前b的样本为正样本。同时考虑同一个grid预测框被两个gt关联的情况,取cos较小的值,该预测框为对应的gt的正样本。
YOLOV7
- blog1: https://mp.weixin.qq.com/s/VEcUIaDrhc1ETIPr39l4rg
- paper: https://arxiv.org/pdf/2207.02696.pdf
- 知乎: https://www.zhihu.com/question/541985721
- GiantPandaCV: https://mp.weixin.qq.com/s/yISNTj_--UIG5Fwcbcl-8g
模型的整体框架:
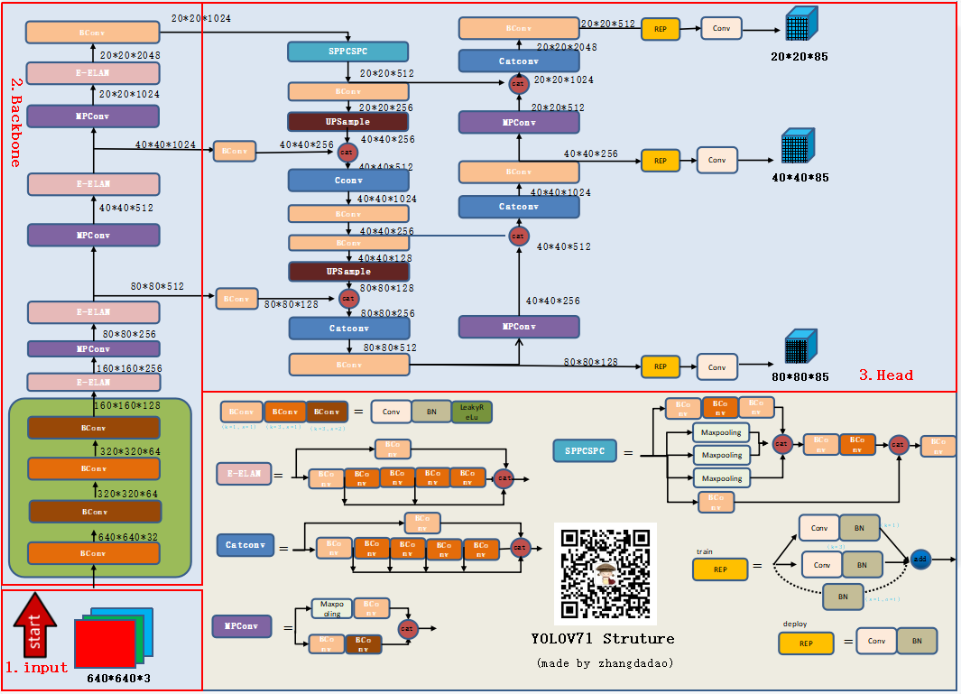
yolov7正负样本匹配
yolov7因为基于anchor based , 集成v5和v6两者的精华,即yolov6中的第一步的初筛换成了yolov5中的筛选正样本的策略,保留第二步的simOTA进一步筛选策略。
同时yolov7中有aux_head 和lead_head 两个head ,aux_head做为辅助,其筛选正样本的策略和lead_head相同,但更宽松。如在第一步筛选时,lead_head 取中心点所在grid和与之接近的两个grid对应的预测框做为正样本,如图绿色的grid, aux_head则取中心点以及周围的4个预测框为正样本。如下图绿色+蓝色区域的grid.
同时在第二步simOTA部分,lead_head 是计算初筛正样本与gt的IOU,并对IOU从大到小排序,取前十之和并取整,记为b。aux_head 则取前二十之和并取整。其他步骤相同,aux_head主要是为了增加召回率,防止漏检,lead_head再基于aux_head 做进一步筛选。
YOLOV8
- blogs1:详细解读YOLOv8的改进模块
- blogs2:《目标检测》-第32章-浅析YOLOv8
YOLOv8总结:
-
Backbone部分:
使用的依旧是CSP的思想,不过YOLOv5中的C3模块被替换成了C2f模块,实现了进一步的轻量化,同时YOLOv8依旧使用了YOLOv5等架构中使用的SPPF模块 -
Neck部分:
PAN-FPN:毫无疑问YOLOv8依旧使用了PAN的思想,不过通过对比YOLOv5与YOLOv8的结构图可以看到,YOLOv8将YOLOv5中PAN-FPN上采样阶段中的卷积结构删除了,同时也将C3模块替换为了C2f模块 -
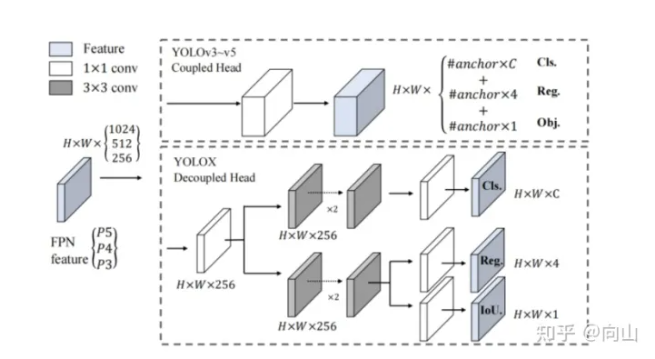
Head部分:
Decoupled-Head(解耦合头):分类和回归两个任务的head不再共享参数
-
损失函数:
YOLOv8开始使用VFL Loss作为分类损失,后面相关代码被注释掉了,可以猜测,作者团队发现使用VFL和使用普通的BCE的最终效果是一样,没有明显优势,所以就还是采用了简单的、没有涉及痕迹的BCE。使用DFL Loss+CIOU Loss作为回归损失。 -
样本匹配:
YOLOv8抛弃了以往的IOU匹配或者单边比例的分配方式,而是使用了Task-Aligned Assigner匹配方式,与yolov6相同 -
其他:
YOLOv8抛弃了以往的Anchor-Base,使用了Anchor-Free的思想