创建第二个乌龟的第二个方法,打开终端输入:rosrun turtlesim_node __name:=
会跳出两个窗口。
在终端输入rosrun turtlesim turtle_teleop_key后,控制乌龟,两个乌龟会同时运动

打开终端,输入mkdir -p catkin_ws1/src命令,创建工作环境
再输入cd catkin_ws1/src/,进入atkin_ws1/src/进行编写
输入catkin_init_workspace形成工作空间
回到上一级,输入catkin_make运行一下。如图: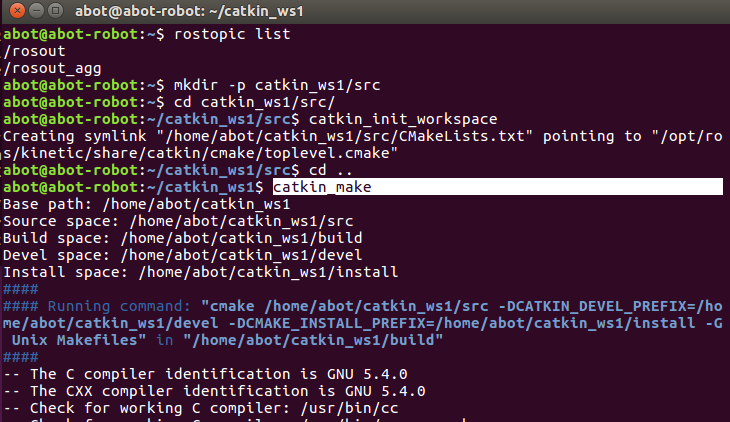
将两个代码文件复制到相对应的地方,如图:
再输入catkin_make运行一下
把这段代码输入到CMakeLists.txt
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
# add_dependencies(talker ${PROJECT_NAME}_generate_messages_cpp)
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
# add_dependencies(talker ${PROJECT_NAME}_generate_messages_cpp)
再输入catkin_make运行一下
查看是否成功