有空把引入、逻辑、原理介绍给写了,目前先给大家看看代码。
将来写大概会分成这么几块:
- 汽车运动学自行车模型
- 跟踪算法主流模型及特点
- 纯跟踪算法原理推导
- 代码介绍
代码原创,来之不易,请勿不注明转载。
喜欢点个赞吧!网上许多代码都跑不起来hh
clc;
clear;
% ------------form road------------
cx = 0:0.1:50;
cx = cx';
for i = 1:length(cx)
cy(i) = sin(cx(i)/5)*cx(i)/2;
end
%--------form initial state---------
L = 2.9 ;% [m] wheel base of vehicle
i = 1;
target_speed = 2.5;
T = 80;
x = 0; y = -3; yaw = 0; v = 0;
time = 0;
%--------how to update--------------
lastIndex = length(cx)-1;
dt = 0.1 ;% [s]
Lfc = 1.0; % look-ahead distance
k = 0.1; % look forward gain
Kp = 1.0 ; % speed propotional gain
Lf = k * v + Lfc;
%--------show initial state---------
target_ind= calc_target_index(x,y,cx,cy,Lf)
%--------Update now keep on track-----
while T > time && target_ind < lastIndex-10
target_ind= calc_target_index(x,y,cx,cy,Lf)
ai = PIDcontrol(target_speed, v,Kp);
di = pure_pursuit_control(x,y,yaw,v,cx,cy,target_ind,k,Lfc,L,Lf);
[x,y,yaw,v] = update(x,y,yaw,v, ai, di,dt,L)
time = time + dt;
pause(0.1)
subplot(1,2,1)
plot(cx,cy,'b',x,y,'r-*')
title(['time=' num2str(time), 'v=' num2str(v),'ind=' num2str(target_ind)])
drawnow
hold on
box off
% should also show errors
end
%-----growing speed-----------------
function [a] = PIDcontrol(target_v, current_v, Kp)
a = Kp * (target_v - current_v);
end
%-----pute pursuit-------------------
function [delta] = pure_pursuit_control(x,y,yaw,v,cx,cy,ind,k,Lfc,L,Lf)
tx = cx(ind);
ty = cy(ind);
alpha = atan((ty-y)/(tx-x))-yaw;
%--------should also show lateral error---------
latError =abs((ty-y)*cos(yaw) - (tx-x)*sin(yaw))
subplot(1,2,2)
plot(x,latError,'b-*')
title(['latError=' num2str(latError)])
drawnow
hold on
box off
%------------------------------------------------
Lf = k * v + Lfc;
delta = atan(2*L * sin(alpha)/Lf) ;
end
%-----update state-------------------
function [x, y, yaw, v] = update(x, y, yaw, v, a, delta,dt,L)
x = x + v * cos(yaw) * dt;
y = y + v * sin(yaw) * dt;
yaw = yaw + v / L * tan(delta) * dt;
v = v + a * dt;
end
%-----find the nearest point---------
function [ind] = calc_target_index(x,y, cx,cy,Lf)
N = length(cx);
%N = length(cx)-11;
Distance = zeros(N,1);
for i = 1:N
Distance(i) = sqrt((cx(i)-x)^2 + (cy(i)-y)^2);
end
[~, location]= min(Distance);
ind = location;
ind = ind + 10;
end
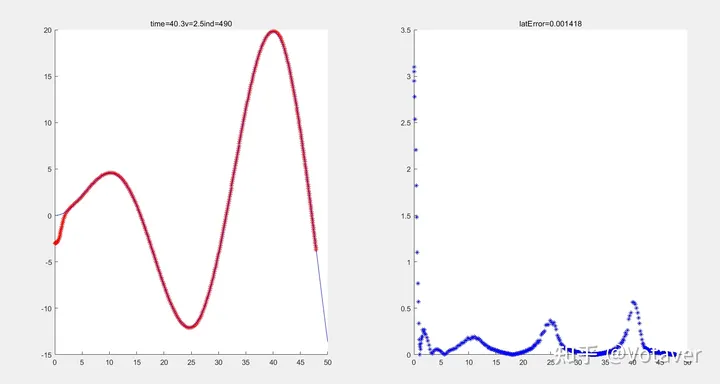
结果图是实时的,包含一个路径跟踪展示和横向误差图,大概如下(图形并不精美,展示原理所用):
凑字数凑字数使得可以投稿!不用理会
凑字数凑字数使得可以投稿!不用理会
凑字数凑字数使得可以投稿!不用理会