本文是对图像去噪领域经典的双边滤波法的一个简要介绍与总结,论文链接如下:
https://users.soe.ucsc.edu/~manduchi/Papers/ICCV98.pdf
1.前言引入
对一副原始灰度图像,我们将它建模为一张二维矩阵u,每个元素称为一个像素pixel,元素大小为灰度值。由于设备原因我们无法获取精准的图像,往往受到噪声的影响。常见的噪声建模是把噪声看作一个与图像大小一样的矩阵v,每一个位置的大小是相互独立且服从某一分布的随机变量。在理论研究中,常常取均值为0,方差一定的正态分布。
噪声加在原始图像上得到我们的观测图像u0=u+v,我们的任务就是尽可能地从u0中恢复出u。这里的第一个问题就是什么叫“尽可能”?即评判标准。除了肉眼可见的恢复效果,常常以PSNR(峰值信噪比)来评判一个方法的好坏,越高说明效果越好。
2.双边滤波的引入
最原始的去噪方法是均值滤波(或高斯均值滤波)。对图像中一个像素点x,设定一个大小一定的方形邻域,用邻域内其他像素的灰度值的(加权)平均值来更新这个点的像素。加权的方式一般是离x越近,则权重越大。
很显然,这种“平均”的手段目的就是平滑图像,减少噪声点的突兀。不过这种无差别处理手段带来的负面影响就是将图像中的细节也模糊了。
为了能够在去噪的同时保持细节信息,双边滤波诞生了。原理非常简单,一句话概括就是:
邻域滤波时的加权系数不仅仅考虑几何距离,而且考虑灰度相似性。
3.公式
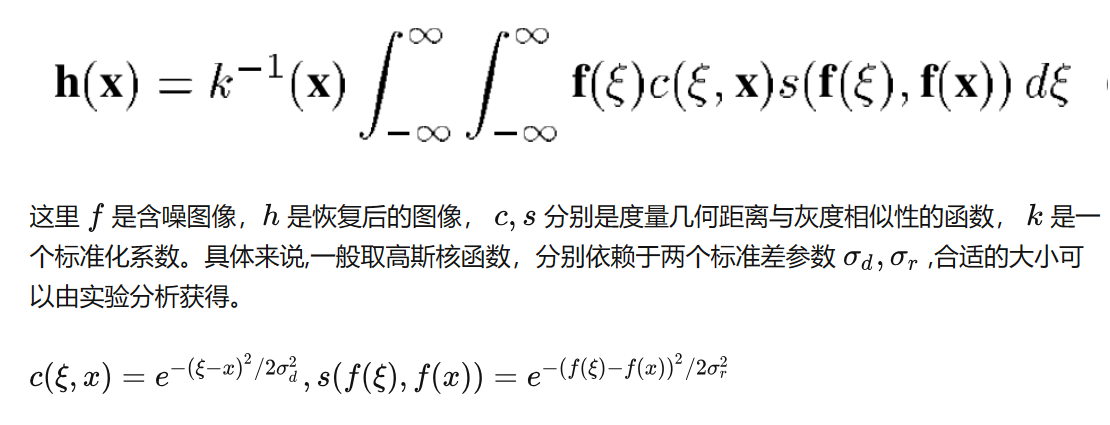
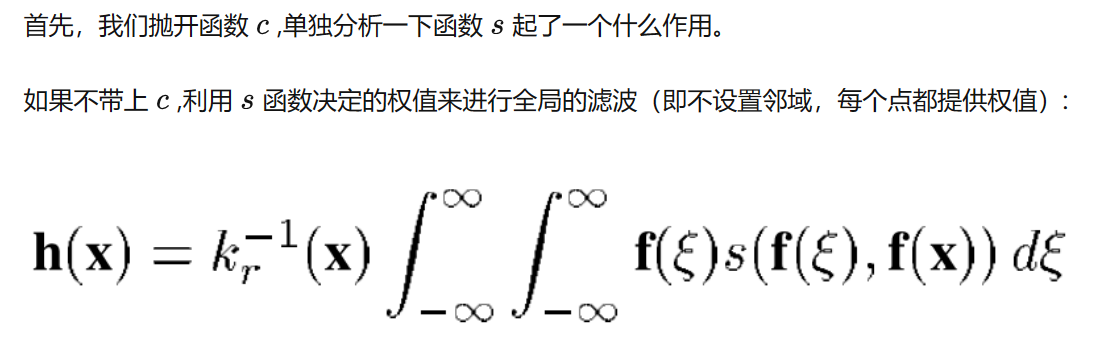
4.原理与解释
首先,直观来讲,对于噪声和细节我们可以有一个初步的区分认识。那就是如果在一个平滑区域出现一个噪点,噪声附近的点与它灰度值差距是差不多大的。例如在一个白色区域,出现了一个黑点噪声,那么邻域中的正常点因为与它灰度差距差不多进而分配到的相似度权值基本一样。这样,滤波便近似于高斯均值滤波。但是对于边缘细节部分,我们本身的要求就是想让灰度值差距大的一边(即边界外部)分配到的权重更小,而边界内部分配到的权重大,这恰好就是相似度函数
能够提供的。所以,这样一个直观的认识就能让我们清楚双边滤波为什么可以保持边界细节信息。
当然,我们还有更为具体的下面的直方图分析。
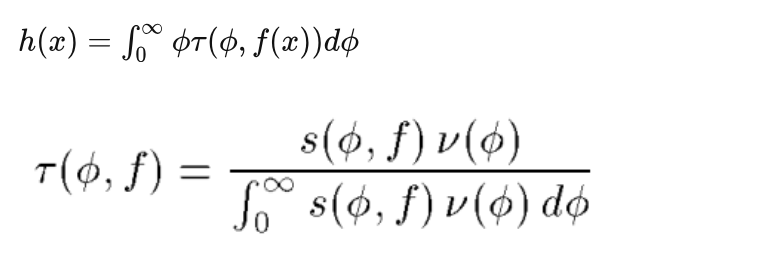
5.直方图分析
那么其实这样的功能仅仅是将图像的灰度直方图向波峰挤压(也就是变窄了)。因为上述公式我们可以转换为:

假设下图是单峰图像的灰度直方图曲线(实线部分):
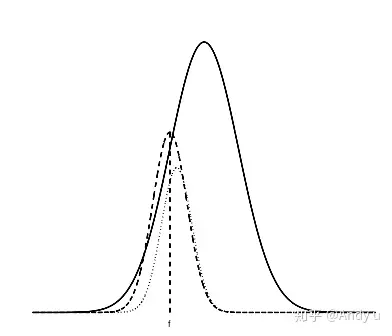
那么对于峰值左边的一点灰度值,由于灰度值大于它的像素更多,所以这样做滤波后它会向右移。同理,对于峰值右边的,会向左移,从而造成曲线向中间挤压。
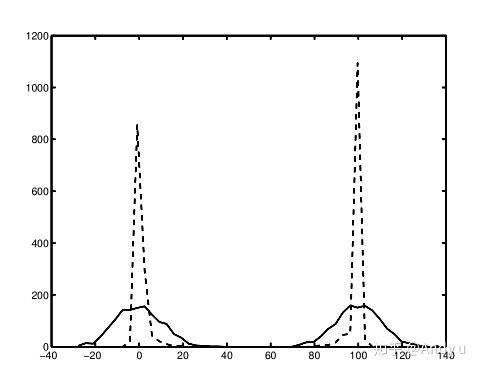
初步看来,这样一种滤波似乎只是一种直方图变换,并无大用。但当他和邻域均值滤波结合在一起时便大有可为,因为这时,这种变换只是在一个小小的窗口内进行。如下图,是边界处一个窗口中的灰度曲线(实线部分),左右两边分别对应着黑色部分和白色部分(即边界内外)。当实行双边滤波后,他的灰度曲线变为虚线部分。可以看出,这样的变换将使得边界更加分明。
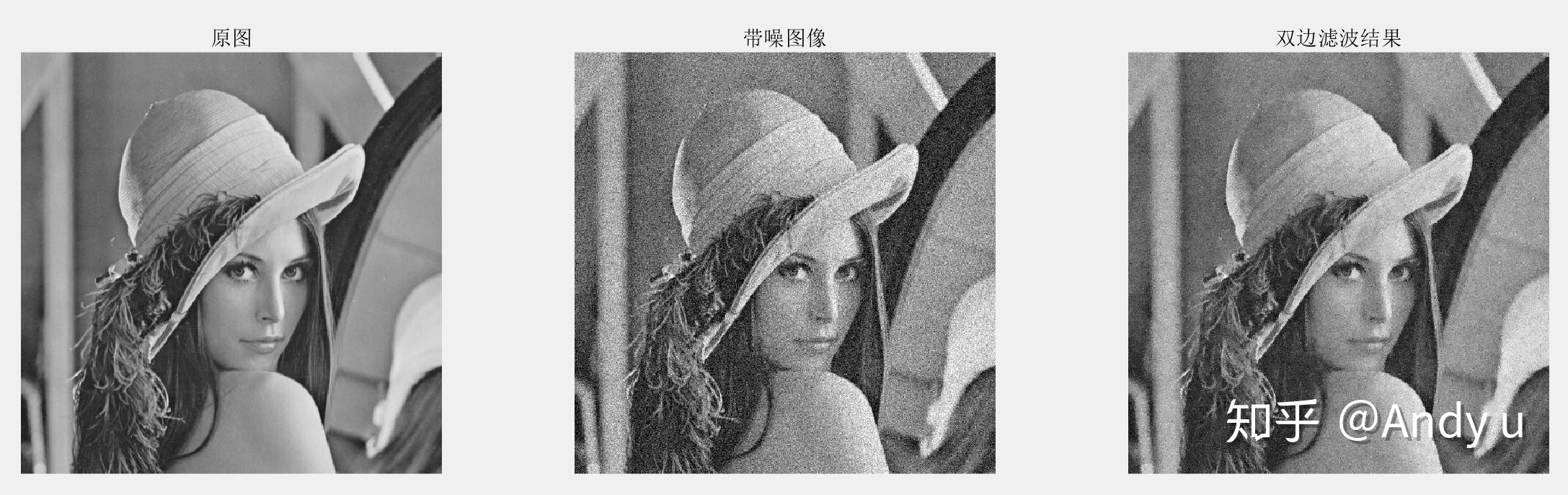
6.实验效果
本文只分析了灰度图像,rgb图像详情参照论文原文,不再做赘述。
下图是实验效果,可以看出边界处保持的较好,但去噪效果一般。事实上,双边滤波是二十年前方法,对比BM3D,sparse coding等state-of-the-art methods已经相当过时,但它提供的想法是非常值得借鉴的。