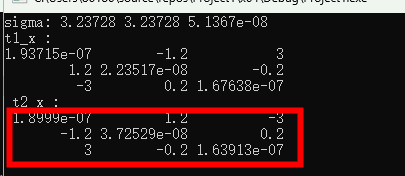
#include <iostream> #include <vector> #include <Eigen/Eigen> #include <Eigen/Dense> int main() { //SHAPE_FACTORY(BoxCude) < ClipFunType > ss; //std::cout << int(ss.points_.size()) << "\n"; //std::cout << int(ss.shape_type_) << "\n"; Eigen::Matrix3f R; R = Eigen::AngleAxisf(3.1415926 / 2.0, Eigen::Vector3f::UnitZ()) * Eigen::AngleAxisf(3.1415926 / 4.0, Eigen::Vector3f::UnitX()) * Eigen::AngleAxisf(3.1415926 / 4.0, Eigen::Vector3f::UnitY()); Eigen::Vector3f t(0.2, 3.0, 1.2); Eigen::Matrix3f t_x; t_x << 0.0, -t[2], t[1], t[2], 0.0, -t[0], -t[1], t[0], 0.0; Eigen::Matrix3f essential_matrix_t = t_x * R; Eigen::BDCSVD<Eigen::MatrixXf> svd_e(essential_matrix_t, Eigen::ComputeThinU | Eigen::ComputeThinV); Eigen::VectorXf sigma = svd_e.singularValues(); Eigen::MatrixXf U = svd_e.matrixU(); Eigen::MatrixXf V = svd_e.matrixV(); Eigen::Matrix3f diag_sigma; diag_sigma.setZero(); if (sigma.size() >= 2) { std::cout << "sigma: " << sigma[0] << " " << sigma[1] << " " << sigma[2] << "\n"; diag_sigma(0, 0) = sigma[0]; diag_sigma(1, 1) = sigma[1]; } Eigen::Matrix3f R_2pi, R_2pi_f; R_2pi = Eigen::AngleAxisf(3.1415926 / 2.0, Eigen::Vector3f::UnitZ()) * Eigen::AngleAxisf(0.0, Eigen::Vector3f::UnitX()) * Eigen::AngleAxisf(0.0, Eigen::Vector3f::UnitY()); R_2pi_f = Eigen::AngleAxisf(-3.1415926 / 2.0, Eigen::Vector3f::UnitZ()) * Eigen::AngleAxisf(0.0, Eigen::Vector3f::UnitX()) * Eigen::AngleAxisf(0.0, Eigen::Vector3f::UnitY()); Eigen::Matrix3f R1, R2; Eigen::Vector3f t1, t2; R1 = U * R_2pi.transpose() * V.transpose(); R2 = U * R_2pi_f.transpose() * V.transpose(); Eigen::Matrix3f t1_x = U * R_2pi * diag_sigma * U.transpose(); Eigen::Matrix3f t2_x = U * R_2pi_f * diag_sigma * U.transpose(); std::cout << "t1_x : \n" << t1_x << "\n "; std::cout << "t2_x : \n" << t2_x << "\n "; return 0; }
结果: