将对象的描述从一个坐标系转换到另一个坐标系,在图形应用非常重要。本文主要从坐标的角度,探讨二维、三维空间下的对象如何从一个坐标系转换到另一个坐标系。
非笛卡尔坐标系,有极坐标、球面坐标、椭圆坐标坐标等。这里仅考虑笛卡尔坐标系。
二维坐标系变换
由旋转角进行坐标系转换
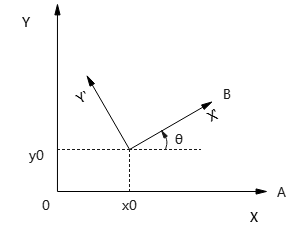
如下图,二维空间下,有2个坐标系:A为xy坐标系,B为x'y'坐标系。其中,xy坐标系原点\((0,0)\),将其绕原点逆时针旋转θ角,然后平移到\((x_0,y_0)\)处,得到x'y'坐标系。
问题:现在A坐标系下的任一点\(P(x,y)\),如何转换到B坐标系下的点\(P'(x', y')\)?
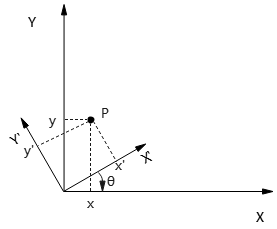
要求两者的转换关系,需分两步得到转换矩阵:
- 将x'y'系统的坐标原点\((x_0,y_0)\)平移到xy系统的原点\((0,0)\);
- 将x'轴顺时针旋转θ角,到x轴上。
步骤1对应平移变换矩阵:
步骤2对应旋转变换矩阵:
注意:顺时针旋转,需要取\(-\theta\)。
xy系统转换到x'y'系统的复合变换矩阵:
这样,xy系统下的坐标就能通过平移变换、旋转变换而得到x'y'下的坐标。
- 如何理解坐标轴的复合变换?
思考:明明xy坐标轴变换成了x'y'坐标轴,为什么是x'y'坐标系统转换成x'y'系统,而不是反过来?
考虑最简单的点(0,0)来验证。假设x'y'系统下,原点坐标\((0,0)^B\),那么其在xy系统下坐标为\((x_0,y_0)^A\),显然不符合复合转换矩阵;
而xy系统下原点\((0,0)^A\),在x'y'系统下,坐标为\((-(x_0\cos\theta+y_0\sin\theta),x_0\sin\theta-y_0\cos\theta)^B\),符合转换矩阵。(可考虑特殊情况,\(\theta={\pi\over 4}, x_0=y_0=1\))
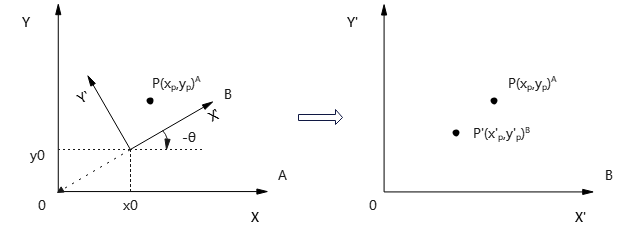
可以这样理解,将x'y'坐标轴变换到xy坐标轴的位置后,就只用关心P点在新坐标系统下的位置。如下图所示,经过复合变换,将xy系统下点\(P(x_p,y_p)^A\)转换到x'y'系统下的点\(P'(x_p',y_p')^B\)。
变换过程:
如果令\(x=x_p, y=y_p, x'=x_p', y'=y_p'\),
那么,
这样,就将xy系统下的坐标转换到了x'y'系统。
构造旋转矩阵
有时,我们并不知道旋转角θ具体是多少,而知道新的坐标轴方向(x'或y'轴)。此时,可以先求θ角大小(向量点积),然后得到旋转矩阵;这里要介绍的是另一种方法:构造旋转矩阵,将坐标轴x'y'旋转到坐标轴xy。
正交矩阵概念
先复习几个概念:
- 正交向量
点积为0的两个或多个向量,称为正交向量。
假设向量\(V_1=(x_1,y_1), V_2=(x_2,y_2)\)是一组正交向量,则\(V_1\cdot V_2=x_1x_2+y_1y_2=0\)。
所谓正交向量,
- 正交矩阵
如果矩阵A,满足\(A^TA=E\),则称A为正交矩阵。
对于正交矩阵,其行向量组(或列向量组)为单位向量且两两正交。这组列向量构成一个空间的基,称为规范正交基。
下面证明:
设A是一个列向量矩阵且为正交矩阵,\(A=(\alpha_1,\alpha_2,...,\alpha_n)\),其中\(\alpha_i(i=1,2,...,n)为列向量\),那么,
对于任意列向量\(\alpha_i,\alpha_j\),
1)如果i=j,那么\(\alpha_i*\alpha_j=\alpha_i*\alpha_i=1\),也就是说,\(\alpha_i\)与自身的内积为1,即列向量\(\alpha_i\)为单位向量。
2)如果i≠j,那么\(\alpha_i*\alpha_j=0\),则列向量\(\alpha_i, \alpha_j\)互为正交向量。
当A由行向量组成时,该结论依然成立。
利用正交矩阵构造旋转矩阵
已知+y'轴方向的向量V。如下图所示,可将V指定为xy系统下相对于原点的一个向量。那么,y'方向的单位向量v:
将v顺时针旋转90°,得到沿x'轴的单位向量u:
上式证明:
如下图所示
∵v, u都是单位向量
∴|v|=|u=1
假设v在第二象限,v与y轴夹角为α,
那么,向量v坐标(-cosα, sinα),向量u坐标(sinα,cosα)
现将v写成(vx,vy),那么u=(vy,-vx),即得证。
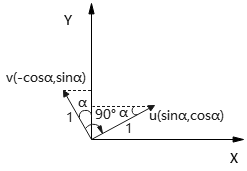
显然,向量v、u正交,有vu=0,即v⊥u。
由式(2),我们知道,旋转矩阵\(R(-\theta)\)的行向量是一组正交单位向量(严格来说,是一组规范正交基):
问题来了,我们是否可以由一组规范正交基得到对应旋转矩阵呢?
答案是可以的,可以用规范正交基作为行向量(或列向量)构造出旋转矩阵。不妨令,
其中,\(v_x=-\sin\theta,v_y=\cos\theta\)。利用式(6) u和v的关系,可以得到,\(u_x=v_y=\cos\theta, u_y=-v_x=\sin\theta\),这符合旋转矩阵\(R(-\theta)\)特性。
接下来,问题是\(\theta\)在[0,2π)范围内是否有唯一解?这样,构造出的旋转矩阵就能对应一个唯一的旋转。
答案是有唯一解。下面证明:
我们知道,正弦和余弦函数在0~2π范围内有2个解(如果有解),设2个解分别为\(\theta1,\theta2\),范围都是\([0,2\pi)\)。
先根据\(\sin\theta\)讨论\(\theta\)取值范围,
1)当\(v_x<0\)时,\(\sin\theta>0\),那么\(\theta1 \in [0,{\pi\over 2}), \theta2\in [{\pi\over 2}, \pi)\);
2)当\(v_x>=0\)时,\(\sin\theta<=0\),那么\(\theta1\in [\pi,{3\over 2}\pi), \theta2\in[{3\over 2}\pi, 2\pi)\);
再根据\(\cos\theta\)讨论\(\theta\)取值范围,
1)当\(v_y>0\),则\(\theta1\in[0,{\pi\over 2}),\theta2\in[{3\over 2}\pi, 2\pi)\);
2)当\(v_y<0\),则\(\theta1\in [{\pi\over 2},\pi),\theta2\in [\pi,{3\over 2}\pi)\)。
再综合sin、cos取值范围。不难发现,当sin、cos取值确定时,\(\theta\)范围只能是长度为π/2的4个区间之一:\([0,{\pi \over 2}), [{\pi \over 2},\pi), [\pi,{3\over 2}\pi), [{3\over 2}\pi,2\pi)\)。
而sin、cos在这些区间上是连续且单调的,因此有唯一解。
举个例子,如果对应y'轴方向的向量V=(-1,0),那么x'轴的方向向量u应该在+y轴上(u=(0,1)),且旋转矩阵为:
而我们根据式(2),令\(\theta={\pi\over 2}\),也能得到同样的旋转矩阵。
tips:这里只是得到旋转矩阵,并没有考虑平移。如果要求平移变换矩阵,还需要知道x'y'坐标原点在xy系统的位置。
三维坐标系变换
类似于二维坐标系变换,三维空间下,也能用一组规范正交基构造绕任意进行轴旋转操作的旋转矩阵。
问题描述:要将xyz系统下的坐标描述转换到x'y'z'坐标系统。
步骤:
1)先将x'y'z'原点平移到xyz原点;
2)进行一系列旋转使得对应坐标轴重合。如果2坐标系比例不同,需要先进行一次缩放变换使得比例相同。
举例,如下图所示:
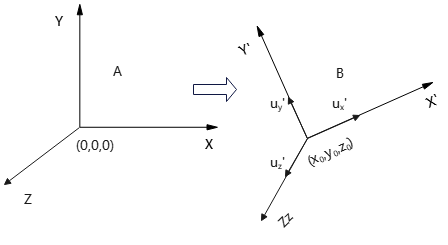
其中,\(u_x',u_y',u_z'\)分别为代表X'、Y'、Z'轴方向的单位轴向量。
x'y'z'系统(A)的原点在xyz系统(B)的\((x_0,y_0,z_0)^A\)位置,其坐标轴由xyz系统对应坐标轴旋转得到。
首先,可以用平移矩阵\(T(-x_0,-y_0,-z_0)\)将x'y'z'原点移至与xyz原点重合。
三维平移、旋转、缩放操作,参见这篇文章计算机图形:三维几何变换。
然后,用单位轴向量来构造坐标轴旋转矩阵,用于将单位轴向量\(u_x',u_y',u_z'\)分别转换到x、y、z轴上。其构造方法,类似于二维的情形(参见式(8))。
注意:这里3个单位轴向量\(u_x'=(u_{x1}',u_{x2},u_{x3}'), u_y'=(u_{y1}',u_{y2}',u_{y3}'), u_z'=(u_{z1}',u_{z2}',u_{z3}')\),其坐标为A系统下的坐标。
于是,我们得到了完整的坐标变换复合矩阵:
小结
坐标系的转换与对象的描述转换是反的,例如x'y'轴转换到xy轴,但该变换对应的是,将xy系统下的对象描述转换到x'y'系统下。