一、什么是数据通信
数据通信是通信技术和计算机技术相结合而产生的一种新的通信方式。要在两地间传输信息必须有传输信道,根据传输媒体的不同,有有线数据通信与无线数据通信之分。但它们都是通过传输信道将数据终端与计算机联结起来,而使不同地点的数据终端实现软、硬件和信息资源的共享。
二、数据通信分类
2.1、数据通信方式
按数据通信方式分类,可分为 串行通信 和 并行通信 两种。
串行通信 的基本特征是 数据逐位顺序依次传输,优点是传输线少、布线成本低、灵活度高等优点,一般用于近距离人机交互,特殊处理后也可以用于远距离,缺点就是传输速率低。
并行通信 是数据各位可以通过 多条线同时传输,优点是传输速率高,缺点就是布线成本高,抗干扰能力差因而适用于短距离、高速率的通信。
| 特点 | 传输速率 | 抗干扰能力 | 通信距离 | IO资源占用 | 成本 |
|---|---|---|---|---|---|
| 串行通信 | 较低 | 较强 | 较长 | 较少 | 较低 |
| 并行通信 | 较高 | 较弱 | 较短 | 较多 | 较高 |
2.2、数据传输方向
根据数据传输方向,通信又可分为 全双工、半双工 和 单工通信。
- 单工 是指数据传输 仅能沿一个方向,不能实现反方向传输,如校园广播。
- 半双工 是指数据传输可以 沿着两个方向,但是需要分时进行,如对讲机。
- 全双工 是指数据可以同时进行 双向传输,日常的打电话属于这种情形。
全双工和半双工通信的区别:半双工通信 是共用 一条线路 实现双向通信,而 全双工 是利用 两条线路,一条用于发送数据,另一条用于接收数据。
2.3、数据同步方式
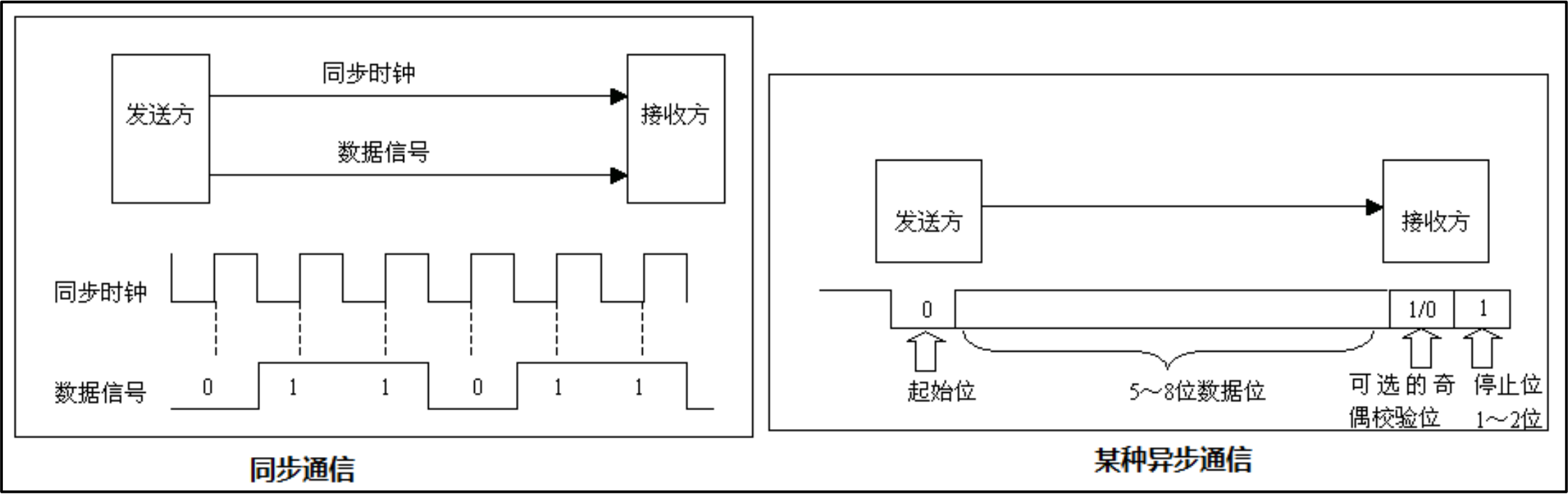
根据数据同步方式,通信又可分为 同步通信 和 异步通信。
同步通信要求通信双方共用同一时钟信号,在总线上保持统一的时序和周期完成信息传输。 优点:可以实现高速率、大容量的数据传输,以及点对多点传输。缺点:要求发送时钟和接收时钟保持严格同步,收发双方时钟允许的误差较小,同时硬件复杂。
异步通信不需要时钟信号,而是在数据信号中加入开始位和停止位等一些同步信号,以便使接收端能够正确地将每一个字符接收下来,某些通信中还需要双方约定传输速率。优点:没有时钟信号硬件简单,双方时钟可允许一定误差。缺点:通信速率较低,只适用点对点传输。
三、通信速率
在数字通信系统中,通信速率(传输速率)指数据在信道中传输的速度,它分为两种:传信率 和 传码率。
- 传信率:每秒钟传输的信息量,即每秒钟传输的 二进制位数,单位为 bit/s(即比特每秒),因而又称为 比特率。
- 传码率:每秒钟传输的 码元个数,单位为 Baud(即波特每秒),因而又称为 波特率。
波特率 被传输的是 码元,码元是信号被调制后的概念,每个码元都可以表示一定 bit 的数据信息量。举个例子,在 TTL 电平标准 的通信中,用 0V 表示 逻辑 0,5V 表示 逻辑 1,这时候这个码元就可以表示两种状态。如果电平信号 0V、3V、5V 和 12V 分别表示二进制数 00、01、10、11,这时候每一个码元就可以表示四种状态。
比特率和波特率的关系可以用以下式子表示:\(比特率= 波特率* log_2M\)
其中,M 表示码元承载的信息量。我们也可以理解 M 为码元的进制数。
采用二进制的时候,波特率和比特率数值上相等。但是这里要注意,它们的相等只是数值相等,其意义上不同。
四、常见的串行通信接口
| 通信接口 | 接口引脚 | 数据同步方式 | 数据传输方向 |
|---|---|---|---|
| UART(通用异步接收器) | TXD:发送端 RXD:接收端 GND:公共地 |
异步通信 | 全双工 |
| 1-write | DQ:发送/接收端 | 异步通信 | 半双工 |
| I2C | SCL:同步时钟 SDA:数据输入/输出端 |
同步通信 | 半双工 |
| SPI | SCK:同步时钟 MISO:主机输入,从机输出 MOSI:主机输出,从机输入 CS:片选信号 |
同步通信 | 全双工 |