在虚拟机上安装好ros系统之后,打开终端,启动ROS Master,输入roscore命令,结果如下:
再启动小海龟仿真器,输入命令:rosrun turtlesim turtlesim_node,结果如下:
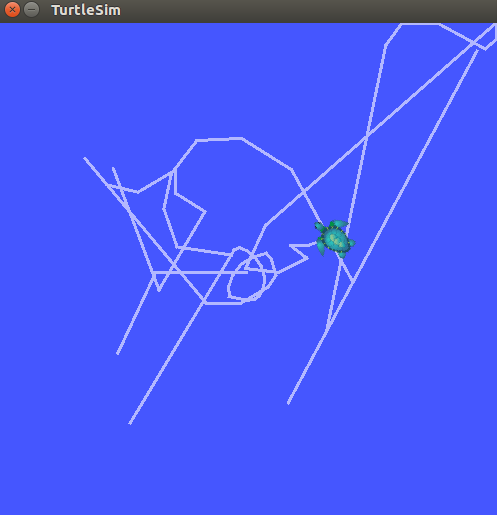
会跳出一个小海龟,再打开一个终端,输入:rosrun turtlesim turtle_teleop_key,启动海龟控制节点,结果如下:
就能用上下左右键来控制小海龟。
再输入rqt_graph命令,就能打开计算图
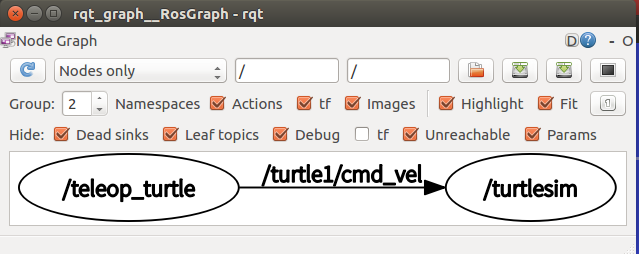
勾上Debug/就可以看到当前系统中重要的节点。
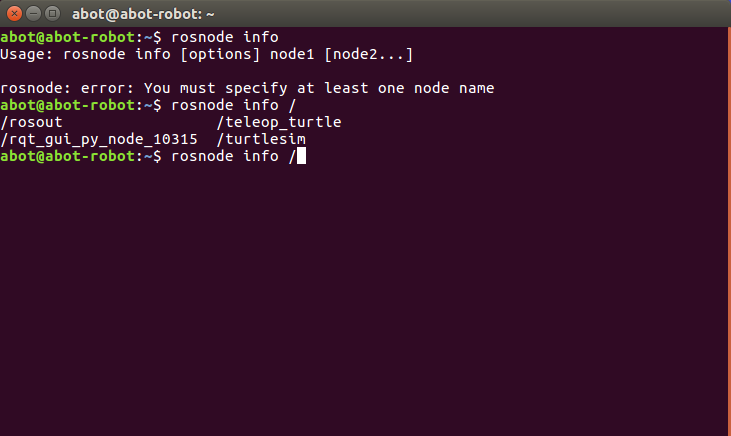
或者rosnode list命令也可以看到当前系统中重要的节点。
想看某一个节点的具体参数,可以输入rosnode info命令再按tab键,可以选择具体的节点。如下:
查看系统当前有哪些话题在发布和订阅,可以使用rostopic list命令,同样,要是想知道某一个具体话题的参数,可以使用rostopic info命令。
要想监听命令信息,可以输入rostopic echo /(something)/,就可以实时看到这个话题具体发布了哪些信息。
可以手动输入信息,让小海龟动起来,打开终端输入rostopic pub-r /turtlet1/cmd_ve geometry_msgs/Twist"linear:

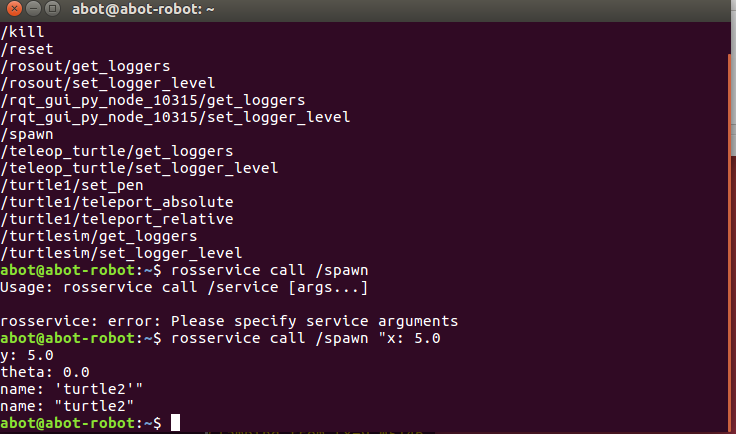
查看系统当前有哪些服务,可以使用rosservice list命令,同样,要是想知道某一个具体服务的参数,可以使用rosservice info命令。
要是想要再生成一个海龟,使用 rosservice call/spawn 利用tab键补充
输入rqt_plot,就可以将海龟的行动通过曲线描绘出来,在topic中选择小海龟的节点