导:“在阅读一篇论文后,要对这几个方面有清晰的认识,动机、创新点和实验设计,外加自己对这篇论文有什么想法”
论文解读:本文组织如下:第二节介绍了相关工作,第三节介绍了大规模搜索场景和系统模型,第四节详细介绍了基于marl的无人机群搜索方法,第五节讨论了仿真设置和实验结果,第六节总结了本文。
建模思考理解:
这个u就是一个在x,y状态下的一个不确定性,它使用香农熵来表示,其中,香农熵越大,不确定性越大,而bxyt,则是在该状态下,发现目标的一个概率
而这个β,就是用于判断此处是否有目标,并只有0和1,先设置一个阈值ϵ,ϵ越大,b就比较难以大于ϵ,那么无人机就比较“谨慎”,不敢随意判断此处有目标,但是,也容易“错付”,反之阈值越小,无人机就越“莽撞”,却更容易误判

这是一个用来更新bxyt的算法,p是保真度。如果传感器未发现目标,则将ps替换为1 - p
这是一个效能值的权衡方程,由环境效能和目标效能组成

由刚刚那个涉及阈值的方程得,阈值越小,β越大,误判概率越大,结过越不可靠,目标效能越小
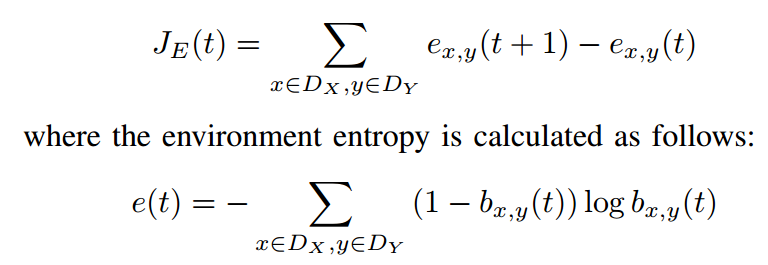
而环境效能则由上一个时刻和这一个时刻的香农熵决定,比如说香农熵增加得比较大,那么环境效能就比较大
动机:
搜索场景的日益复杂,搜索场景的规模越来越大
1.现有无人机群搜索方法缺乏可拓展性和高效协同能力
2.全局信息的准确性和实时性难以保证,需要提供局部信息
3.随着环境和任务是不断变化,无人机和任务数量的增加,状态空间和动作空间也相应变大,传统的优化方法很难有效地找到最优解,因此开发更有效和适应性更强的优化方法至关重要
创新点
采用分布式方法:更适合于复杂的环境和任务情况,可以提高系统的可靠性和容错性,分布式方法的计算和通信开销也相对较低,更适合大规模的无人机群协作。
采用局部信息:高度适应环境的独特特征和挑战
1.基于marl(多智能体强化学习)的搜索优化
(1)结构,就是去建模,Agent:把每个无人机建模为一个智能体,按照强化学习的方式去训练,Observation:去观察环境,把观察的好几个维度的指标(t时刻的局部信息,t时刻最新的TPM, 为无人机u在t时刻的位置,除无人机u以外的所有无人机的位置,无人机u的飞行方向,以及除无人机u以外的所有无人机的飞行方向) ,(可以把Observation看成向量?个人观点)当然,可以把Observation建模为一个"state"但是,真正的state还得是所有的observation的综合,如下图所示

然后运用了MADDPG(多智能体深度确定性策略梯度)算法解决早期的MARL(包括DL,CL)带来的问题