AbstractQueuedSynchronizer源码阅读
本人的源码阅读主要聚焦于类的使用场景,一般只在java层面进行分析,没有深入到一些native方法的实现。并且由于知识储备不完整,很可能出现疏漏甚至是谬误,欢迎指出共同学习
本文基于corretto-17.0.9源码,参考本文时请打开相应的源码对照,否则你会不知道我在说什么
例子
AbstractQueuedSynchronizer简称AQS。在JUC中基于AQS实现了各种各样的锁和同步工具(信号量、事件等),继承它的类只需要维护一个状态变量,剩下的队列操作以及阻塞机制都由AQS来完成。
什么叫继承它的类只需要维护一个状态变量,看一个官方文档的说明:
To use this class as the basis of a synchronizer, redefine the following methods, as applicable, by inspecting and/or modifying the synchronization state using getState, setState and/or compareAndSetState:
- tryAcquire
- tryRelease
- tryAcquireShared
- tryReleaseShared
- isHeldExclusively
意思是我们只需要重写AQS的这几个方法,并且通过AQS提供的getState, setState and/or compareAndSetState这几个方法对状态变量进行修改,就能达到我们的想要的各种效果。
看一下官方文档给出的使用AQS实现不可重入互斥锁的例子就明白了,这里定义状态为1表示锁被占用,0表示锁空闲:
public class Mutex implements Lock, Serializable {
private static class Sync extends AbstractQueuedSynchronizer {
@Override
protected boolean tryAcquire(int acquires) {
assert acquires == 1;
if (compareAndSetState(0, 1)) {
setExclusiveOwnerThread(Thread.currentThread());
return true;
}
return false;
}
@Override
protected boolean tryRelease(int releases) {
assert releases == 1;
if (!isHeldExclusively()) {
throw new IllegalMonitorStateException();
}
setExclusiveOwnerThread(null);
setState(0);
return true;
}
public boolean isLocked() {
return getState() != 0;
}
@Override
protected boolean isHeldExclusively() {
return getExclusiveOwnerThread() == Thread.currentThread();
}
public Condition newCondition() {
return new ConditionObject();
}
private void readObject(ObjectInputStream s) throws IOException, ClassNotFoundException {
s.defaultReadObject();;
setState(0);
}
}
private final Sync sync = new Sync();
@Override
public void lock() {
sync.acquire(1);
}
@Override
public void lockInterruptibly() throws InterruptedException {
sync.acquireInterruptibly(1);
}
@Override
public boolean tryLock() {
return sync.tryAcquire(1);
}
@Override
public boolean tryLock(long time, @NotNull TimeUnit unit) throws InterruptedException {
return sync.tryAcquireNanos(1, unit.toNanos(time));
}
@Override
public void unlock() {
sync.release(1);
}
@NotNull
@Override
public Condition newCondition() {
return sync.newCondition();
}
public boolean isHeldByCurrentThread() {
return sync.isHeldExclusively();
}
public boolean hasQueuedThreads() {
return sync.hasQueuedThreads();
}
}
首先AQS的子类通常作为 基于AQS的同步/互斥工具类 的私有静态内部类,这里是Sync类,然后再声明一个Sync类型的变量供我们的Mutex使用,而不是直接继承AQS。设计模式上来说,像是 适配器模式 吧。
然后看到Sync重写AQS的几个方法:
- tryAcquire:通过CAS将状态设为1(占有锁),成功的话设置当前线程为持有锁的线程,否则返回false表示失败
- tryRelease:检查当前线程不是占有锁的线程的话,直接抛异常。否则将状态设为0(释放锁)
- isHeldExclusively:检查当前线程是否持有当前锁的线程
另外因为这里Mutex是独占锁而不是共享锁,因此不用实现
- tryAcquireShared
- tryReleaseShared
然后Mutex就可以拿着Sync调用方法进行lock、unlock等操作了,整个实现的代码十分简单,因为大部分活AQS都帮我们干了。而且那么多同步工具类都依赖于AQS,足以说明了AQS提供了很多的功能,十分强大,下面将进行分析。
Overview-CLH锁
上网一搜AQS解析,必定离不开CLH锁。CLH作为AQS阻塞队列的节点,一个线程绑定一个节点。注意只有发生竞争锁时才会有节点入队。比如只有单线程获取锁的话,根本不会阻塞,更没有竞争锁。
目前网上大多是基于JDK14之前的AQS分析,而JDK14之后AQS进行了重构,JDK17与14的AQS是差不多的,因此我将根据版本17的来分析,不再讨论旧的设计。另外在这一小节过后,CLH这个词也许不会在出现,通通称为”节点“、“队列”
下面的梳理是基于AQS源码中CLH Nodes的Overview注释进行,你也可以直接看文档的Overview,不过可能比较抽象,能理解多少理解多少,结合代码分析后再回来看Overview会非常清晰。
CLH单个节点的成员变量很好理解:
abstract static class Node {
volatile Node prev; // initially attached via casTail
volatile Node next; // visibly nonnull when signallable
Thread waiter; // visibly nonnull when enqueued
volatile int status; // written by owner, atomic bit ops by others
}
prev和next将节点链成双链表,waiter是节点绑定的线程,status成员用于记录节点状态(比如是否正在被阻塞),通过位操作可以记录多种状态。下面看一下CLH队列的结构。
首先CLH队列永远会有一个dummy node作为头节点并用变量head保存,当然,dummy node是懒初始化的,也就是在入队第一个节点的时候才会被初始化。下图是初始化了dummy node后的状态,tail变量指向队尾节点。
+-------+ +------+
| | | |
| head | <---- | tail |
|(dummy)| | |
+-------+ +------+
当第一个节点first入队后的状态图如下:
+-------+ prev +-------+ +------+
| | <---- | | | |
| head | | first | <---- | tail |
|(dummy)| ----> | | | |
+-------+ next +-------+ +------+
这部分对应的代码如下,第一次循环懒初始化dummy(如果还没初始化的话),第二次才入队:
private void tryInitializeHead() {
Node h = new ExclusiveNode();
if (U.compareAndSetReference(this, HEAD, null, h))
tail = h;
}
final void enqueue(Node node) {
if (node != null) {
for (;;) {
Node t = tail;
node.setPrevRelaxed(t); // avoid unnecessary fence
if (t == null) // initialize
tryInitializeHead();
else if (casTail(t, node)) {
t.next = node;
if (t.status < 0) // wake up to clean link
LockSupport.unpark(node.waiter);
break;
}
}
}
}
接下来是唤醒操作(signalling),AQS采取一种像Dekker算法那样的策略:尝试获取资源的线程不断尝试获取锁,自旋结束还获取不到的话,就park睡眠,直到被释放锁的线程清除WAITING状态并用unpark唤醒,然后重复上述步骤。
这里提到的Dekker算法是操作系统中的互斥算法,类似的还有Peterson算法,这里简单穿插进来了解一下:
// dekker algorithm
process_p {
pturn = true;
while (qturn) {
if (turn == 2) {
pturn = false;
while (turn == 2);
}
pturn = true;
}
// critical section
turn = 2;
pturn = false;
}
process_q {
qturn = true;
while (pturn) {
if (turn == 1) {
qturn = false;
while (turn == 1);
}
qturn = true;
}
// critical section
turn = 1;
qturn = false;
}
Dekker用于两个进程互斥地访问临界区:pturn和qturn分别代表两个进程进入临界区的意愿,turn代表谁能真正进入临界区。当检测到对方有意愿,并且不是自己的turn时直接放弃自己的意愿,然后不断检测对方是否放弃turn,最后重新声明自己的意愿,并检测turn。
文档说CLH的signalling是Dekker-like的,我想是因为AQS.state就好比turn,自旋+阻塞就好比dekker的忙等。
Overview的剩余内容
AQS支持独占和共享模式,在共享模式下,尝试获取锁的操作会通知下一个等待线程也去获取锁。
在条件变量上等待的线程会单独形成一条单链表,await方法将其加入这条链表,被唤醒之后将其从链表摘下,并入队到主队列中(CLH锁队列)。
AQS在共享变量上进行了很细致的设计,比如对AQS的head, tail, state成员总是volatile读/写,即总是加上full fence,我想这一点是因为像state这样的变量是子类能直接使用的,而AQS不知道子类会怎么加fence,因此直接full fence避免内存可见性等问题。而Node类的status, prev, next变量虽然也是volatile,但是对于他们的访问使用了更宽松的fence策略,因为这些变量对外不可见的,AQS完全可以控制,比如Node.waiter变量的访问甚至没加volatile限制,因为对他的访问夹在两个原子访问中,相当于前后都已经加了fence。(这块是在我之前碎片化学习了内存屏障后的浅薄理解,可能有纰漏)。这些更宽松的访问是直接用Unsafe实现的,在JDK 9后提供了更安全的VarHandle,文档说没有使用它是为了 avoid potential VM bootstrap issues...不懂。
代码分析
从大段注释到代码一路读下来,第一个遇到的核心函数是
final int acquire(Node node, int arg, boolean shared,
boolean interruptible, boolean timed, long time)
但又遇到了比较复杂的函数cleanQueue,因此先分析这个cleanQueue
cleanQueue
根据doc可以知道,cleanQueue有两个作用;
- 从tail开始遍历队列,清除已取消的节点
- 唤醒那些新成为队头的节点去获得锁(与dummy节点区分开来,这里指的是head.next)
代码用了两层循环,外部那层用于当队列结构改变的时候,重新开始遍历,因此重点在于内层循环。先来看内循环第一行:
for (Node q = tail, s = null, p, n;;) { // (p, q, s) triples
一上来先定义四个让人直呼acm高手的变量名,分别是q s p n,并且后面注释(p, q, s) triples,再联系下面的代码大概可以猜到这四个变量分别代表:
- q:当前节点
- s:q的后继节点successor
- p:q的前驱节点predecessor
- n:临时的后继节点next
明白变量的含义之后,接着看下去:
if (q == null || (p = q.prev) == null)
return; // end of list
如果队列没有节点了,或者当前节点是第一个节点(dummy节点)则已处理完毕。这是唯一的函数出口。在这之后的代码都保证了q和p不为空。
if (s == null ? tail != q : (s.prev != q || s.status < 0))
break; // inconsistent
- 后继为空:tail != q的话,说明有其他线程修改了tail,队列结构改变,因此直接break然后重新开始遍历。
- 后继不为空:后继的前驱不是q(也就是q的后继的前驱不是q的话,说明s已经不再是q的后继)或者后继已经被取消(s是已经被处理过的节点,这个函数就是要清除已取消的节点,因此得重新开始遍历,去处理这个s)的话,也说明队列结构改变了,直接break。
if (q.status < 0) { // cancelled
if ((s == null ? casTail(q, p) : s.casPrev(q, p)) &&
q.prev == p) {
p.casNext(q, s); // OK if fails
if (p.prev == null)
signalNext(p);
}
break;
}
到此终于来到了处理节点的代码,根据常量的定义,status<0代表节点已被取消(最高位为1的int类型必然是负数):
// Node status bits, also used as argument and return values
static final int WAITING = 1; // must be 1
static final int CANCELLED = 0x80000000; // must be negative
static final int COND = 2; // in a condition wait
首先还是根据后继是否为空分情况讨论:
- 后继为空:直接将tail指向前驱节点
- 后继不为空:将后继的前驱指向q的前驱
上述两种情况用的都是CAS操作,在赋值的同时检测了队列结构是否改变(这里称CAS为testAndSet更合理),如果队列结构改变的话返回false,这样就可以直接break重新开始遍历了。
设置成功后将p.next设成s,至此从结构上已经完成了将节点q从队列删除(学过双链表就不难脑补出来)。
然后最后一个if判断,如果p是第一个节点的话,说明p是dummy节点,而原先的第一个有效节点(dummy.next)已经被删除,下一个节点成为了第一个有效节点,此时它可以去获取锁,所以调用signalNext唤醒它。
由于删除q是否成功都意味着队列结构的改变,因此最后break重新开始遍历。
if ((n = p.next) != q) { // help finish
if (n != null && q.prev == p) {
p.casNext(n, q);
if (p.prev == null)
signalNext(p);
}
break;
}
这里检测p.next是否指向q(q的前驱的后继是否是q),如果是的话,说明队列结构没被改变继续处理,否则进入下一步判断:
如果n(p当前的后继)不是null,并且当前q的前驱为p,说明当前为这样的状态:
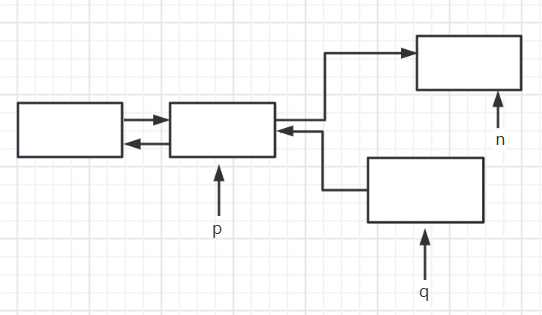
会出现这样的状态是因为并发导致p.next被其他线程所修改,后面将p.next强行恢复为指向q即可。然后检测如果第一个有效节点发生改变(检测到p是dummy),那么则唤醒这个节点去获得锁。最后也是由于队列结构改变直接break。
TODO:这里我暂时存疑,什么时候会出现这样的情况呢?强行将它恢复成cleanQueue需要的结构的话,不会有什么问题吗。话说回来,其实也没必要太纠结,因为AQS在关于并发、吞吐量以及其他的一些权衡上的细枝末节非常多,分析整体的思想即可。
s = q;
q = q.prev;
这是最后两行代码,走到这里也就说明本次循环没有找到已取消的节点,队列结构也没发生改变,因此往head方向继续遍历。
总之cleanQueue核心功能就是用来清理一些已取消的节点,期间可能会出现这样的情况:已经被遍历过的节点被取消了,但是没有被发现(q已经差不多前进到head了),因此本次cleanQueue不会被清除。这种情况是正常的,可以类比GC,节点的清除是批量的,不是一被取消就会被清除的,可以提高性能,没删除的节点可以等下一批删除。
acquire
这个函数的功能是,尝试通过tryAcquire获取锁,自旋数次获取不到之后,就主动调用park进入阻塞状态。如果某次tryAcquire成功则返回正数,被中断则返回负数,超时返回0。
先看下函数签名以及对应参数含义:
final int acquire(Node node, int arg, boolean shared, boolean interruptible, boolean timed, long time)
- node:只有在条件变量中acquire才会传入
- arg:用户自定义参数,最终会传给tryAquire/tryAcquireShared
- shared:是否共享模式的acquire
- interruptible:如果为true,那么在中断后返回负数
- timed:是否有限等待
- time:有限等待时长,单位是纳秒
为了简单起见但是又不失根据地分析代码,我们注意到在之前Mutex例子中的lock方法中直接调用的是acquire(1),因此从这个调用入手去分析理解,并且Mutex对应的是独占模式,因此下面先暂时忽略共享模式的代码。
我们分析最简单的情况:只有一个线程尝试去获取已经被其他线程占用的锁,即对tryAcquire的调用通通返回false
public final void acquire(int arg) {
if (!tryAcquire(arg))
acquire(null, arg, false, false, false, 0L);
}
这个acquire的重载首先调用了tryAcquire(这个函数在Mutex示例中有,是由子类自定义的尝试获取锁的方法),如果尝试获取失败的话,再调用acquire。实际上acquire里也会数次调用tryAcquire
然后进入acquire(null, arg, false, false, false, 0L)
Thread current = Thread.currentThread();
byte spins = 0, postSpins = 0; // retries upon unpark of first thread
boolean interrupted = false, first = false;
Node pred = null; // predecessor of node when enqueued
- current:当前线程
- spins:下次唤醒后的最大自旋次数
- postSpins:暂存最大自选次数
- interrupted:记录线程是否被中断
- first:node是否为第一个有效节点(即是否为head.next指向的节点)
- node:当前线程所绑定的节点
最外边是一个无限for循环,这个写法在之前enqueue方法里也见过,其实非常常见:循环里写了很多 if 分支根据当前的运行状态选择不同的处理逻辑。比如在enqueue方法中,首次循环时tail还没初始化(状态1)先去初始化tail,第二次循环时tail已经初始化(状态2),此时将节点入队。明白了这个写法之后,就不会被下面一堆的 if 弄乱了。
首先看第一块 if:
// 分支1
if (!first && (pred = (node == null) ? null : node.prev) != null && !(first = (head == pred))) {
if (pred.status < 0) {
cleanQueue(); // predecessor cancelled
continue;
} else if (pred.prev == null) {
Thread.onSpinWait(); // ensure serialization
continue;
}
}
这个代码块主要用于清理已经被取消的前驱节点,目的是让node尽量往队头靠,最好变成第一个有效节点,这样就有机会去获取锁了。根据变量的含义,可知这条 if 判断的是:如果node不是空,并且不是head,并且不是第一个有效节点。换句话说就是:当node是非第一个有效节点时为 true,那么进入这个分支:
- 当前驱节点被取消(pred.status < 0),用cleanQueue清除被取消的节点,然后重新循环。
- 当节点是第一个有效节点(pred.prev == null),则重新开始循环。如果走到这一步的话,说明在它之前的节点在别的线程中被清理了,当前节点变成了第一个有效节点。
下面看第二块 if:
// 分支2
if (first || pred == null) {
boolean acquired;
try {
if (shared)
acquired = (tryAcquireShared(arg) >= 0);
else
acquired = tryAcquire(arg);
} catch (Throwable ex) {
cancelAcquire(node, interrupted, false);
throw ex;
}
if (acquired) {
if (first) {
node.prev = null;
head = node;
pred.next = null;
node.waiter = null;
if (shared)
signalNextIfShared(node);
if (interrupted)
current.interrupt();
}
return 1;
}
}
这个代码块的功能是使用tryAcquire尝试获取锁,由于循环可能会执行多次,对应的会多次tryAcquire。另外因为要满足FIFO特性,因此只有第一个有效节点才去竞争这个锁(first=true),或者是一开始还没生成节点的时候也会去尝试一次tryAcquire(pred==null)。如果获取锁成功,那么清除该节点(如果有的话),并返回一个正数表示获取成功。
否则,如果上一步tryAcquire不成功,那么继续往下走。
下面是一个大的if-ifelse-else体,每个分支对应不同的处理逻辑,梳理一下各个分支的功能,写在注释里:
if (node == null) { // allocate; retry before enqueue
// 分支3. 为当前线程生成节点
if (shared)
node = new SharedNode();
else
node = new ExclusiveNode();
} else if (pred == null) { // try to enqueue
// 分支4. 将节点入队
node.waiter = current;
Node t = tail;
node.setPrevRelaxed(t); // avoid unnecessary fence
if (t == null)
tryInitializeHead();
else if (!casTail(t, node))
node.setPrevRelaxed(null); // back out
else
t.next = node;
} else if (first && spins != 0) {
// 分支5. 如果节点是第一个有效节点则自旋获取锁,即重新再来一轮循环,运行第二个 if 块中的tryAcquire
--spins; // reduce unfairness on rewaits
Thread.onSpinWait();
} else if (node.status == 0) {
// 分支6. 设置节点的状态为阻塞ing,到这一步的话,说明自旋次数用完了还没获取到锁,需要准备阻塞了,不然浪费CPU资源,很明显在设置完这个状态之后还会去挣扎一次tryAcquire
node.status = WAITING; // enable signal and recheck
} else {
// 分支7. 真正开始阻塞节点对应的线程,阻塞之前增加节点下次唤醒后的最大自旋次数。被唤醒之后,清除阻塞ing的状态,如果被中断的话则退出循环
long nanos;
spins = postSpins = (byte)((postSpins << 1) | 1);
if (!timed)
LockSupport.park(this);
else if ((nanos = time - System.nanoTime()) > 0L)
LockSupport.parkNanos(this, nanos);
else
break;
node.clearStatus();
if ((interrupted |= Thread.interrupted()) && interruptible)
break;
}
循环结束后只有一句:
return cancelAcquire(node, interrupted, interruptible);
cancelAcquire用于清理acquire失败的节点,只有两种情况会被调用:
- tryAcquire抛出异常(对应分支2中的异常处理)
- 超时或者被中断(对应分支7的两个break)
private int cancelAcquire(Node node, boolean interrupted, boolean interruptible) {
if (node != null) {
node.waiter = null;
node.status = CANCELLED;
if (node.prev != null)
cleanQueue();
}
if (interrupted) {
if (interruptible)
return CANCELLED;
else
Thread.currentThread().interrupt();
}
return 0;
}
acquire总结
acquire完成的功能其实就是不断自旋获取锁,获取不到就阻塞,醒来后继续自旋,然后阻塞,如此往复。为了实现公平的特性(FIFO),队列中只有第一个有效节点才会去tryAcquire,并且是多次tryAcquire,比如在还没生成节点前会tryAcquire一次,阻塞前tryAcquire至少一次,唤醒后会tryAcquire一次。
一些疑问点:
-
为什么第一个有效节点被正常唤醒后(非超时/中断)却还有可能获取不到锁,不是FIFO的吗?
因为唤醒之后到重新获取锁这段时间内,可能有其它根本不在队列中的线程这个时候tryAcquire抢先拿到了锁。从这个角度看,AQS的FIFO公平性只是针对在队列中的线程来说的。因此AQS采取了线程唤醒后增加最大自旋次数来提高公平性(对应的分支5也有一句源代码注释
reduce unfairness on rewaits) -
Thread.onSpinWait() 与 Thread.yield() 有什么区别
直接看onSpinWait的官方描述:on some architectures the Java Virtual Machine may issue the processor instructions to address such code patterns in a more beneficial way....总之不明觉厉,跟具体处理器有关,具体区别得去问hotspot开发者们,反正busy-waiting的时候他就会用onSpinWait。
acquire共享模式补充
release
相比acquire方法,这个方法就“友好”多了。
public final boolean release(int arg) {
if (tryRelease(arg)) {
signalNext(head);
return true;
}
return false;
}
尝试释放锁,释放成功后再唤醒队列第一个等待的节点去获得锁。
内部类ConditionObject
到此,AQS还剩共享模式以及ConditionObject没分析。至于AQS其他的方法像hasQueuedPredecessors,isQueued等,经过前面的分析理解阻塞队列的结构以及行为之后就不难读懂了。下面直接看ConditionObject。
AQS还提供了内部类ConditionObject,实现了Condition接口,作为基于AQS的锁的条件变量,使得线程可以在不同的阻塞在不同的队列中。
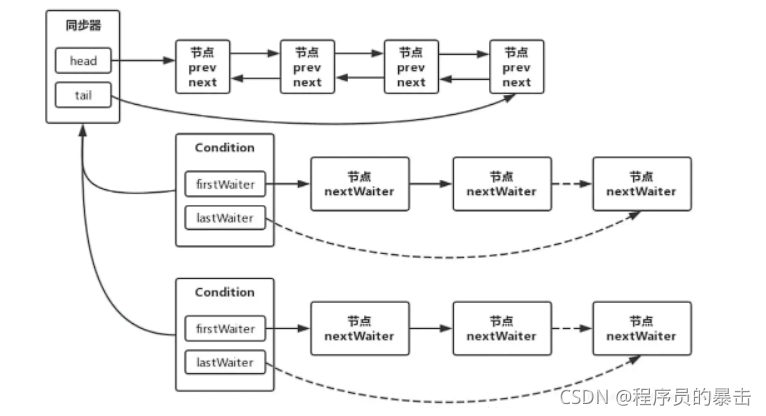
条件变量无非就是await和signal
- await:释放锁并阻塞在等待队列上,等待被signal,唤醒后会自动再次获取锁
- signal:唤醒被阻塞在等待队列上的线程
signal比较简单,先看signal:
public final void signal() {
ConditionNode first = firstWaiter;
if (!isHeldExclusively())
throw new IllegalMonitorStateException();
if (first != null)
doSignal(first, false);
}
可以看到不是随便一个线程都能调用signal的,必须要拥有独占锁的线程才能用signal唤醒其他线程。signal通过doSignal这个方法实现:
/**
* Removes and transfers one or all waiters to sync queue.
*/
private void doSignal(ConditionNode first, boolean all) {
while (first != null) {
ConditionNode next = first.nextWaiter;
if ((firstWaiter = next) == null)
lastWaiter = null;
if ((first.getAndUnsetStatus(COND) & COND) != 0) {
enqueue(first);
if (!all)
break;
}
first = next;
}
}
doSignal很简单,只干了一件事,或者说signal只干了一件事:将节点从条件变量队列摘下来,重新入队到AQS队列。
接下来再看看await方法,另外里面有一个enableWait方法比较重要,先看这个enableWait:
/**
* Adds node to condition list and releases lock.
*
* @param node the node
* @return savedState to reacquire after wait
*/
private int enableWait(ConditionNode node) {
// 检查当前线程有没有独占该锁
if (isHeldExclusively()) {
// 绑定节点与当前线程
node.waiter = Thread.currentThread();
node.setStatusRelaxed(COND | WAITING);
// 将节点加入该条件变量的等待队列中
ConditionNode last = lastWaiter;
if (last == null)
firstWaiter = node;
else
last.nextWaiter = node;
lastWaiter = node;
// 保存状态,并释放锁
int savedState = getState();
if (release(savedState))
return savedState;
}
// 如果线程没有独占该锁,则直接抛异常
node.status = CANCELLED; // lock not held or inconsistent
throw new IllegalMonitorStateException();
}
结合注释可以知道,enableWait的功能是将该线程对应的节点加入条件变量的等待队列,并释放其对应的锁。
下面再来看await方法:
public final void await() throws InterruptedException {
if (Thread.interrupted())
throw new InterruptedException();
ConditionNode node = new ConditionNode(); // 为当前线程生成节点
int savedState = enableWait(node); // 释放锁并将节点加入条件变量的阻塞队列
LockSupport.setCurrentBlocker(this); // for back-compatibility,记录线程的阻塞源
boolean interrupted = false, cancelled = false, rejected = false;
while (!canReacquire(node)) { // 检测节点有没有被signal,还没有的话就不能acquire,这个函数返回false,进入循环体
if (interrupted |= Thread.interrupted()) {
if (cancelled = (node.getAndUnsetStatus(COND) & COND) != 0)
break; // 如果节点阻塞在条件变量上,并且被中断的话,退出循环,下面会检测到并且抛出中断异常
} else if ((node.status & COND) != 0) {
// 阻塞线程
try {
if (rejected)
node.block();
else
ForkJoinPool.managedBlock(node);
} catch (RejectedExecutionException ex) {
rejected = true;
} catch (InterruptedException ie) {
interrupted = true;
}
} else
// 可能还没完成入队,自旋等一下
Thread.onSpinWait(); // awoke while enqueuing
}
LockSupport.setCurrentBlocker(null);
node.clearStatus();
// 重新获取锁
acquire(node, savedState, false, false, false, 0L);
// 如果之前被中断了,那么就清除条件变量队列上的这个节点,包括其他non-waiting的节点,并重新抛出中断异常
if (interrupted) {
if (cancelled) {
unlinkCancelledWaiters(node);
throw new InterruptedException();
}
Thread.currentThread().interrupt();
}
}
await流程如下:
- 生成线程对应的节点
- 将节点加入条件变量的等待队列,并释放其对应的锁
- 不断调用canReacquire,通过节点在不在AQS队列中获知线程有没有被signal,如果不在的话就继续阻塞线程
- 当线程被signal或者被中断后退出循环,并重新尝试获得锁
- 最后处理中断
await需要注意的地方也不少:
- 阻塞线程有两种方式,node.block()和ForkJoinPool.managedBlock(node)。后者使用ForkPoolManager管理。TODO:阅读ForkJoinPool
- 无论是被signal还是被中断,await返回之前都会再次调用acquire获取锁,并且注意到参数interruptable=false,说明即使await是可中断的,但前提是得获取到锁才能返回。Condition.await方法的接口文档也说明了这一点:When the thread returns it is guaranteed to hold this lock
- while循环里的else分支啥也没干,因此相当于自旋,之前说过这种情况下调用Thread.onSpinWait有利于优化运行。
参考链接
- AbstractQueuedSynchronizer 源码abstractqueuedsynchronizer源码aqs abstractqueuedsynchronizer源码 abstractqueuedsynchronizer源码 级别aqs abstractqueuedsynchronizer aqs_abstractqueuedsynchronizer abstractqueuedsynchronizer concurrent 20230608 abstractqueuedsynchronizer aqs 10 abstractqueuedsynchronizer底层juc aqs aqs_abstractqueuedsynchronizer abstractqueuedsynchronizer abstractqueuedsynchronizer java