概
一般的 GCN 每层通常需要经过所有的结点的 propagation, 但是这是费时的. 像普通的深度学习方法一样利用 mini-batch 的训练方式由于缺乏独立性的保证而不能非常有效地施展. 本文提出地 FastGCN 希望解决这个问题.
符号说明
- \(H^{(l)}\), 第 \(l\) 层的 embeddings;
- \(W^{(l)}\), 第 \(l\) 层的 权重;
- \(\hat{A}\), 邻接矩阵;
- GCN 的 propagation 过程:\[H^{(l+1)} = \sigma (\hat{A}H^{(l)}W^{(l)}). \]
Motivation
-
在深度学习中, 我们通常需要优化这样的一个损失:
\[L = \mathbb{E}_{x \sim D} [g(W; x)], \]通常我们通过独立地采样点来近似期望:
\[L_{emp} = \frac{1}{n} \sum_{i=1}^n g(W; x_i), \quad x_i \sim D, \forall i. \] -
但是在图中, 独立性是难以保障的, 因为, 在 GCN 中, 数据成了结构的一部分, 即 \(\hat{A}\) 的存在导致即使我们独立地采样样本点, 但是邻接矩阵是无法保证和完整的邻接矩阵一个效果的.
FastGCN
-
假设我们拥有图 \(G' = (V', E')\), 它包含了所有在现在和未来可能遇到的结点, 且我们假设结点集合 \(V'\) 上存在这样的一个概率空间: \((V', F, P)\), 其中 \(F\) 是定义的域 (如 \(2^{V'}\)), \(P\) 是某个概率测度.
-
我们把 GCN 的每一层看成是如下的积分变换:
\[\tilde{h}^{(l+1)}(v) = \int \hat{A}(v, u) h^{(l)}(u) W^{(l)} \mathrm{d} P(u), \\ h^{(l+1)}(v) = \sigma(\tilde{h}^{(l+1)}(v)), \\ l=0,\ldots, M-1. \]这里, 我们将 \(h\) 看成是一个 embedding function, 给定结点返回对应的特征.
-
类似地, 我们可以将图上的训练损失表示为:
\[L = \mathbb{E}_{v \sim P}[g(h^{(M)}(v))] = \int g(h^{(M)}(v)) \mathrm{d} P(v). \] -
于是, 我们可以通过采样来近似:
\[\hat{h}^{(l+1)} (v) := \frac{1}{t_l} \sum_{j=1}^{t_l} \hat{A}(v, u_j^{(l)}) \hat{h}^{(l)} (u_j^{(l)}) W^{(l)}, \\ \hat{L} := \frac{1}{t_M} \sum_{i=1}^{t_M} g(\hat{h}^{(M)}(u_i^{(M)})). \] -
可以证明 (依概率 1):
\[\lim_{t_0, t_1, \ldots, t_M \rightarrow + \infty} \hat{L} = L. \] -
当我们选择 \(P\) 为均匀采样的时候, 算法如下:
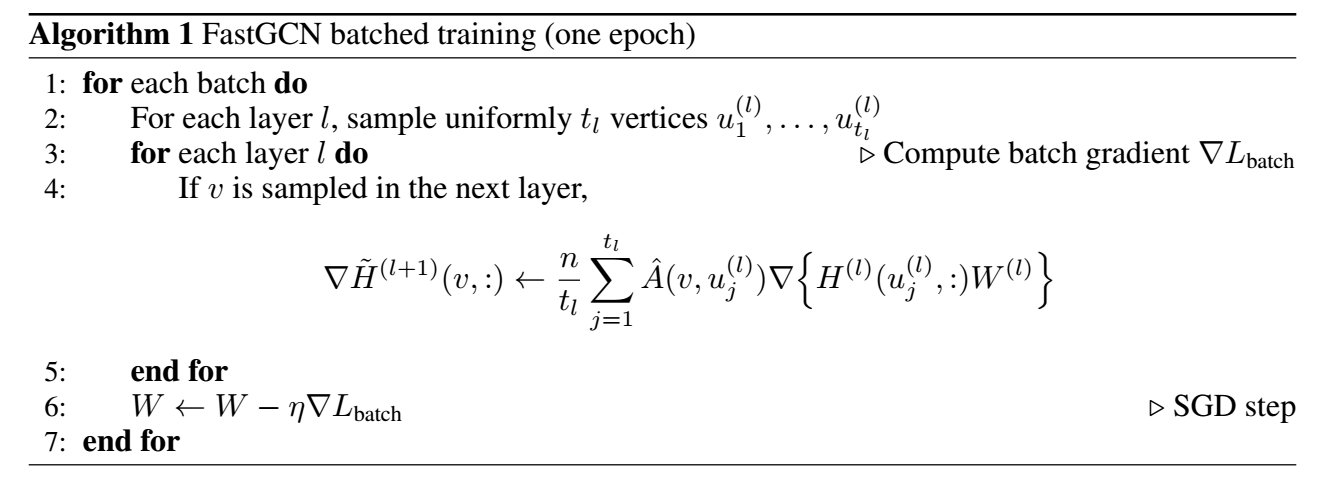
- 其中 \(n\) 是因为, 原来的 GCN 的 aggregation 过程:\[\begin{array}{ll} h(v) &= \sum_{u} \hat{A}(v, u) h(u) W \\ &= n \cdot \frac{1}{n} \sum_{u} \hat{A}(v, u) h(u) W \\ &= n \cdot \mathbb{E}_{u} [\hat{A}(v, u) h(u) W] &\approx n \cdot \frac{1}{t} \sum_{j=1}^{t} [\hat{A}(v, u_j) h(u_j) W]. \end{array} \]
方差分析
-
令:
\[y(v_i) := \frac{1}{t} \sum_{j=1}^t \hat{A}(v, u_j) x(u_j) \]表示一个结点的估计, 作者希望估计
\[G := \frac{1}{s} \sum_{i=1}^s y(v_i) \]的方差.
-
其方差如下 (\(u, v\) 是独立的):
\[\text{Var}(G) = R + \frac{1}{st} \int \int \hat{A}(v, u)^2 x(u)^2 dP(u) dP(v), \]其中
\[R = \frac{1}{s}(1 - \frac{1}{t}) \int e(v)^2 dP(v) - \frac{1}{s} (\int e(v) d P(v))^2, \\ e(v) = \int \hat{A}(v, u) x(u) dP(u). \]注: 作者证明的时候, 用到了一个很有意思的性质:
\[\begin{array}{ll} \text{Var}_{u,v}\Big\{ f(u, v) \Big\} &=\mathbb{E}_{u,v}\Big\{ (f(u, v) - \mathbb{E}_{u,v}[f(u, v)])^2 \Big\} \\ &=\mathbb{E}_{u,v}\Big\{ (f(u, v) - \mathbb{E}_{u}[f(u, v)])^2 \Big\} + \mathbb{E}_{v}\Big\{ (\mathbb{E}_{u}[f(u, v)] - \mathbb{E}_{u,v}[f(u, v))^2 \Big\} \\ &=\mathbb{E}_{v}\Big\{ \text{Var}_u(f(u, v)) \Big\} + \text{Var}_{v}\Big\{ \mathbb{E}_{u}[f(u, v)] \Big\}. \end{array} \] -
通过改变采样策略, 我们可以改进第二项的值从而改进方差, 从而作者引入了 importance sampling, 即
\[y_Q(v) := \frac{1}{t} \sum_{j=1}^t \hat{A}(v, u_j) x(u_j) (\frac{dP(u)}{dQ(u)}|_{u_j}), \quad, u_1, \ldots, u_t \sim Q. \]从而:
\[G_{Q} := \frac{1}{s} \sum_{i=1}^s y_Q(v_i). \] -
这样最优的 \(Q\) 为:
\[dQ(u) = \frac{b(u)|x(u)| dP(u)}{\int b(u)|x(u)| dP(u)}, \: b(u) = [\int \hat{A}(v, u) dP(v)]^{1/2}, \]使得
\[\text{Var}\{G_Q\} = R + \frac{1}{st} [\int b(u) |x(u)| dP(u)]^2. \] -
但是这个有一个问题, 就是在训练过程中 \(x(u)\) 是时刻在变化的, 所以这个分布是不稳定的, 故实际中, 作者选择
\[dQ(u) = \frac{b(u)^2 dP(u)}{\int b(u)^2 dP(u)}. \] -
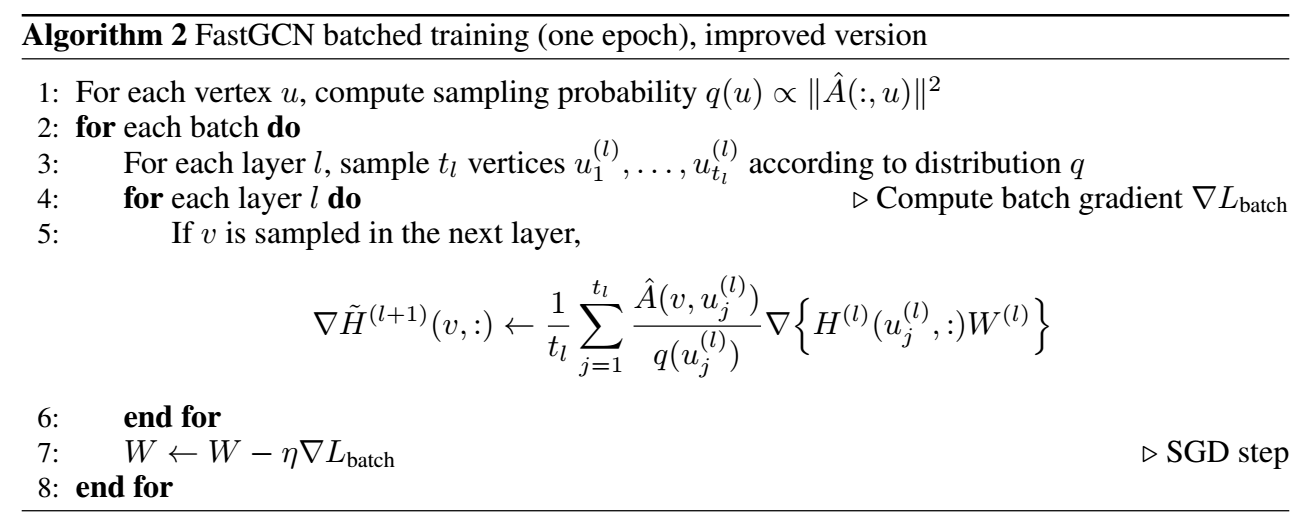
在实际中, 我们可以定义:
\[q(u) = \|\hat{A}(:, u)\|^2 / \sum_{u' \in V} \|\hat{A}(:, u')\|^2, \quad \forall u \in V. \] -
基于重要性采样的算法如下:
代码
- Convolutional Importance Learning Networks Samplingconvolutional importance learning networks layer-dependent convolutional importance dependent importance learning skills basic convolutional segmentation biomedical networks classification convolutional imagenet networks convolutional stochastic reduction networks convolutional segmentation networks semantic recommendation convolutional networks hamming convolutional distilling knowledge networks convolutional networks neural cnn