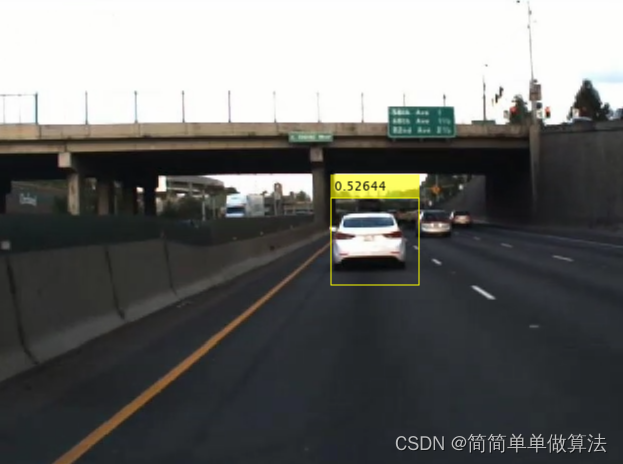
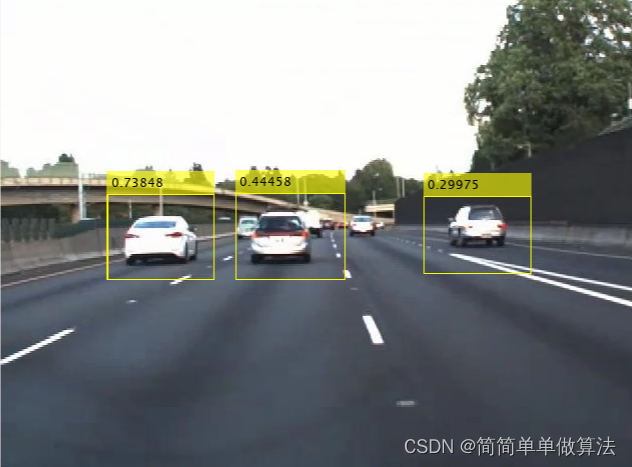
1.算法运行效果图预览

2.算法运行软件版本
MATLAB2022A
3.算法理论概述
车辆检测是计算机视觉领域中的一个重要问题。它在自动驾驶、智能交通系统、交通监控以及车辆计数等应用场景中起着至关重要的作用。近年来,深度学习在图像识别领域取得了显著的成果,其中基于卷积神经网络(CNN)的车辆检测方法成为了研究的热点。
3.1. 卷积神经网络(CNN)
卷积神经网络是一类深度学习模型,特别适用于处理图像数据。它通过多层卷积层、池化层和全连接层来逐步提取图像特征,并进行分类或回归任务。在车辆检测中,我们使用一个经过预训练的卷积神经网络来提取图像特征,然后在其基础上构建车辆检测模型。
3.2. YOLOv2 网络
YOLOv2是YOLO(You Only Look Once)目标检测算法的改进版本。它采用了一系列的技术手段来提高检测精度和速度。YOLOv2的核心思想是将目标检测任务看作是一个回归问题,同时在多个尺度上进行检测。YOLOv2网络结构由卷积层、池化层、全连接层以及特殊的检测层(Detection Layer)组成。其中,检测层负责生成边界框和类别概率。
3.3. 实现过程
车辆检测需要大量的带有车辆标注的图像数据集。通常,我们会采用一些公开的数据集,如KITTI、Cityscapes等。这些数据集包含了大量的道路场景图像,并对图像中的车辆位置进行了标注。
在车辆检测中,我们可以使用经过预训练的卷积神经网络作为特征提取器。常用的预训练网络包括VGG、ResNet、MobileNet等。我们可以选择合适的预训练网络,并在其基础上进行微调。
由于车辆检测是一个复杂的任务,为了提高模型的泛化能力,我们需要进行数据增强。数据增强可以通过随机裁剪、随机旋转、随机缩放等操作来扩充训练集。
在选择好特征提取器后,我们需要在其基础上构建车辆检测模型。YOLOv2采用了多尺度检测策略,即在不同层级的特征图上进行检测。我们需要根据检测目标的大小选择不同的特征图来进行检测。
完成模型构建后,我们需要使用标注的图像数据进行训练。在训练过程中,我们通过最小化损失函数来优化模型参数,使得模型能够准确地检测车辆。常用的损失函数包括边界框回归损失和分类损失。
3.4. 应用领域
基于YOLOv2深度学习网络的车辆检测在许多应用领域中具有广泛的应用。在自动驾驶中,车辆检测是一个关键的技术。基于YOLOv2深度学习网络的车辆检测可以帮助自动驾驶车辆实时感知周围的车辆,并做出相应的决策。在智能交通系统中,车辆检测可以用于实时监控道路交通状况,提供实时的交通流量信息,并辅助交通信号控制。基于YOLOv2深度学习网络的车辆检测可以用于交通违法检测,如红灯闯禁、不按规定车道行驶等。在停车场管理、交通流量统计等场景中,车辆计数是一个重要的任务。基于YOLOv2深度学习网络的车辆检测可以用于实时计数车辆。
4.部分核心程序
options = trainingOptions('sgdm', ...
'MiniBatchSize', 8, ....
'InitialLearnRate',1e-3, ...
'MaxEpochs',100,...
'CheckpointPath', checkpoint_folder, ...
'Shuffle','every-epoch', ...
'ExecutionEnvironment', 'gpu');% 设置训练选项
% 训练 YOLOv2 目标检测器
[detector,info] = trainYOLOv2ObjectDetector(train_data,lgraph,options);
for i = 1:num_test_images
I = imread(test_data.imageFilename{i});% 读取测试图像
[bboxes,scores,labels] = detect(detector,I);% 在测试图像上进行目标检测
results.Boxes{i} = bboxes;
results.Scores{i} = scores;
results.Labels{i} = labels;
end
% 期望的测试集标注信息
expected_results = test_data(:, 2:end);
% 计算平均准确率和召回率
[ap, recall, precision] = evaluateDetectionPrecision(results, expected_results);
plot(recall,precision)
xlabel('召回率')
ylabel('准确率')
grid on
title(sprintf('平均准确率 = %.2f', ap))
% 保存训练好的目标检测器
save yolov2.mat detector