1. GPIO
pin脚计算规则:
引脚编号 = 控制引脚的寄存器基数 + 控制引脚寄存器位数
如:GPIO_E2(即PE02) = (‘E’-’A’)*32+2=130
1)系统支持
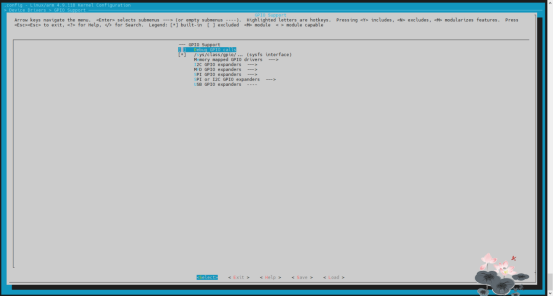
make kernel_menuconfig
Device Drivers --->
[*] GPIO Support --->
[*] /sys/class/gpio/... (sysfs interface)
2)GPIO控制脚本
##############################################################################
# Data: 2023/02/14
# Author: Jimmy Nie <nieshihua@blackvision.net>
##############################################################################
#!/bin/sh
NUM=0 #eg. PB06:('B'-'A')*32+6=38
DIR=0 #0:out, 1:in
OFF=0
ON=1
SLEEP_SECS=2
#0. GPIO tool helper
helper() {
echo -e "GPIO tool usage:"
echo -e "\t$0 init <port num> <directory>"
echo -e "\t\tInit the GPIO driver! You must do this first"
echo -e "\t\tport num: the gpio port, such PB06, port_num=('B'-'A')*32+6=38"
echo -e "\t\tdirectory: 0,out; 1,in \n"
echo -e "\t$0 turn_on <port num>"
echo -e "\t$0 turn_off <port_num>"
echo -e "\t$0 switch <port_num> <seconds>"
echo -e "\t\tseconds: >0 \n"
echo -e "\t -h or --help for this information"
exit
}
#1. Init the GPIO driver
init() {
#1. set the port number
if [[ $# -ne 0 ]]; then
NUM=$1
echo -e "GPIO Port Num: $NUM"
fi
#2. set the directory
if [[ $# -eq 2 ]]; then
DIR=$2
echo -e "GPIO$NUM diretory: $DIR (0:out, 1:in)"
fi
#3. write the export and directory
if [[ -f /sys/class/gpio/export ]]; then
chmod 754 /sys/class/gpio/export
if [[ ! -e "/sys/class/gpio/gpio$NUM" ]]; then
echo -n $NUM > /sys/class/gpio/export
fi
cd /sys/class/gpio/gpio$NUM
if [[ $DIR -eq 0 ]]; then
echo -n "out" > /sys/class/gpio/gpio$NUM/direction
else
echo -n "in" > /sys/class/gpio/gpio$NUM/direction
fi
else
echo -e "/sys/class/gpio/export was not existed"
exit
fi
sleep 1s
}
#2. Turn on/off the gpio
turn_on() {
if [[ ! -e "/sys/class/gpio/gpio$NUM" ]]; then
echo -e "Please init the GPIO driver first"
helper
fi
kill_switch
echo -e "Turn On ~~~~~~"
echo -n $ON > /sys/class/gpio/gpio$NUM/value
}
turn_off() {
if [[ ! -e "/sys/class/gpio/gpio$NUM" ]]; then
echo -e "Please init the GPIO driver first"
helper
fi
kill_switch
echo -e "Turn Off ~~~~~~"
echo -n $OFF > /sys/class/gpio/gpio$NUM/value
}
switch() {
if [[ ! -e "/sys/class/gpio/gpio$NUM" ]]; then
echo -e "Please init the GPIO driver first \n"
helper
fi
if [[ $# -eq 2 ]]; then
SLEEP_SECS=$2
fi
echo -e "Switch seconds: $SLEEP_SECS"
kill_switch
while true
do
echo -e "ON ~~~~~~"
echo -n $ON > /sys/class/gpio/gpio$NUM/value
sleep $SLEEP_SECS
echo -e "OFF ~~~~~~"
echo -n $OFF > /sys/class/gpio/gpio$NUM/value
sleep $SLEEP_SECS
done
}
kill_switch() {
SWITCH_PID=`ps|grep "switch $NUM" | grep -v "grep"|awk '{print $1}'|tr -d ' \n'`
if [[ -n "$SWITCH_PID" ]] && [[ $SWITCH_PID -gt 0 ]]; then
echo -e "kill gpio$NUM, pid=$SWITCH_PID"
kill -9 $SWITCH_PID
else
echo -e "GPIO$NUM not switch!"
fi
}
if [[ $# -lt 2 ]]; then
helper
fi
NUM=$2
case $1 in
init)
if [[ $# -ge 3 ]]; then
init $2 $3
else
helper
fi
;;
turn_on)
turn_on $2
;;
turn_off)
turn_off $2
;;
switch)
if [[ $# -eq 3 ]]; then
switch $2 $3
else
switch $2
fi
;;
*)
helper
;;
esac
3)自启动脚本
本文以控制LED灯为例,LED灯的连接引脚PB02,高电平有效。
自启动文本放在/etc/init.d/目录下
#!/bin/sh /etc/rc.common
START=99
PROC_NAME=bvrobot
start(){
#Init System LED driver PB02
/sbin/gpio_tool init 34 0
sleep 1
/sbin/gpio_tool turn_on 34
}
4)问题点
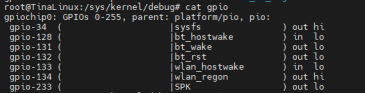
若写入export时候,报“resource busy”,如图:

可以查看一下该引脚是否被占用,查看命令为:
cat /sys/kernel/debug/gpio
2. PWM
1)PWM支持
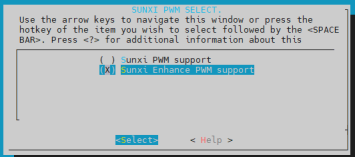
make kernel_menuconfig
Device Drivers --->
[*] Pulse-Width Modulation (PWM) Support --->
<*> SUNXI PWM SELECT. (Sunxi Enhance PWM support) --->
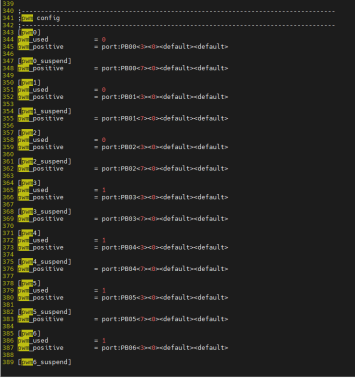
2)系统配置
需要将哪些GPIO引脚复用成PWM?
cdevice 后,找到 sys_config.fex,根据硬件原理图进行配置,我的配置如下:
3)PWM脚本工具
3.1)PWM设备驱动框架
通过PWM框架注册的PWM设备,可通过sysfs 方式进行操控。sysfs文件路径为/sys/class/pwm。
3.2)pwmchipX
/sys/class/pwm/pwmchipX表示PWM控制器
- npwm: PWM 控制器下共有几路 PWM 输出
- export: 在使用 PWM 之前,需要将其导出
- unexport: 将导出的 PWM 删除。
3.3)pwmX
通过 export 导出之后,会生成 pwmX目录。
- enable: 用于使能或禁止PWM输出。
0: 禁止 PWM 输出1: 使能 PWM 输出
- duty_cycle: 用于配置 PWM 的占空比,以 ns(纳秒)为单位
- period: 用于配置 PWM 周期,以 ns(纳秒)为单位
- polarity: 用于配置极性。
normal:普通;inversed:反转;
3.4)通用脚本
##############################################################################
# Data: 2023/02/14
# Author: Jimmy Nie <nieshihua@blackvision.net>
##############################################################################
#!/bin/sh
NUM=0
PERIOD=100000000 #unit: ns, 100ms
DUTY_CYCLE=50000000 #unit: ns, 50ms
POLARITY='normal'
#0. GPIO tool helper
helper() {
echo -e "PWM tool usage:"
echo -e "\t$0 init [port num] <period> <duty_cycle>"
echo -e "\t\t !!! Init the GPIO driver! You must do this first !!!"
echo -e "\t\t port num: the pwm port"
echo -e "\t\t period: unit(ns), default:100ms"
echo -e "\t\t duty_cycle: unit(ns), default:50ms"
echo -e "\t\t polarity: [normal] or [inversed], default:nomal"
echo -e ""
echo -e "\t$0 deinit [port num]"
echo -e "\t$0 enable [port num]"
echo -e "\t$0 disable [port num]"
echo -e ""
echo -e "\t -h or --help for this information"
exit
}
#1. Init the GPIO driver
init() {
#1. set the port number
if [[ $# -eq 1 ]]; then
NUM=$1
echo -e "PWM$NUM period=$PERIOD (default), duty_cycle=$DUTY_CYCLE (default)"
fi
#2. set the directory
if [[ $# -eq 2 ]]; then
PERIOD=$2
echo -e "PWM$NUM period=$PERIOD, duty_cycle=$DUTY_CYCLE (default)"
else
if [[ $# -eq 3 ]]; then
PERIOD=$2
DUTY_CYCLE=$3
echo -e "PWM$NUM period=$PERIOD, duty_cycle=$DUTY_CYCLE"
fi
fi
#3. write the export and period
if [[ -f /sys/class/pwm/pwmchip0/export ]]; then
chmod 754 /sys/class/pwm/pwmchip0/export
if [[ ! -e "/sys/class/pwm/pwmchip0/pwm$NUM" ]]; then
echo -n $NUM > /sys/class/pwm/pwmchip0/export
else
echo -e "The PWM$NUM already existed!"
exit;
fi
sleep 1
cd /sys/class/pwm/pwmchip0/pwm$NUM
echo $PERIOD > period
echo $DUTY_CYCLE > duty_cycle
echo $POLARITY > polarity
else
echo -e "/sys/class/pwm/pwmchip0/export was not existed"
exit
fi
}
deinit() {
if [[ -e "/sys/class/pwm/pwmchip0" ]]; then
echo 1 > /sys/class/pwm/pwmchip0/unexport
fi
echo -e "deinit /sys/class/pwm/pwmchip0/pwm$NUM"
}
#2. Enable/Disable the pwm
enable() {
if [[ ! -e "/sys/class/pwm/pwmchip0/pwm$NUM" ]]; then
echo -e "Please init the PWM$NUM first"
helper
fi
echo -e "Enable PWM$NUM ~~~~~~"
echo -n $ON > /sys/class/pwm/pwmchip0/pwm$NUM/enable
}
disable() {
if [[ ! -e "/sys/class/pwm/pwmchip0/pwm$NUM" ]]; then
echo -e "Please init the PWM$NUM first"
helper
fi
echo -e "Disable PWM$NUM ~~~~~~"
echo -n $OFF > /sys/class/pwm/pwmchip0/pwm$NUM/enable
}
#3. Process
if [[ $# -lt 2 ]]; then
helper
fi
NUM=$2
case $1 in
init)
if [[ $# -eq 2 ]]; then
init $2
elif [[ $# -eq 3 ]]; then
init $2 $3
elif [[ $# -eq 4 ]]; then
init $2 $3 $4
else
helper
fi
;;
deinit)
deinit $2
;;
enable)
enable $2
;;
disable)
disable $2
;;
*)
helper
;;
esac
4)信号检测
使用示波器,测试使能的引脚
3. UART
R328的GPIO需要配置成uart,以便与外部进行交互;目前R328具备5个串口(UART0-4,其中0为debug口),具体可以参见R328的datasheet!
1)配置说明
设置的格式为:
port:<port><mux feature><pullup/down><drive capability><output level>` # Port端口+组内序号<功能分配><内部电阻状态><驱动能力><输出电平状态>
- port: 与GPIO对应,参考硬件原理图
- mux feature:功能配置
input:0; output:1, 其它见对应芯片的datasheet- pullup/down:disabled:0; pullup enabled:1; pulldown enabled:2 (only valid when port is an input)
- drive capability:defines the output drive in mA, values are 0-3 corresponding to 10mA, 20mA, 30mA and 40mA.
- output level:sets the initial output level for the port; 0 = low; 1 = high (only valid for outputs)
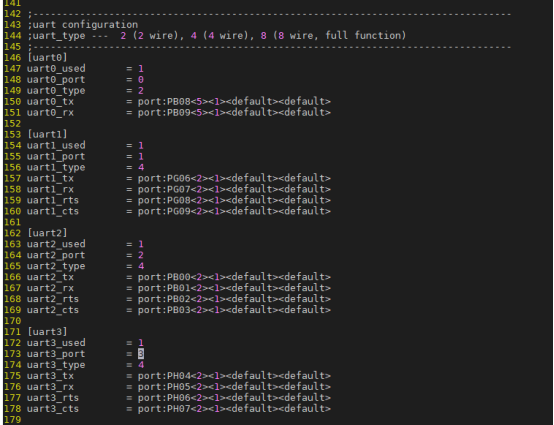
2)系统配置
以下所有的配置,一定根据自己的硬件原理图来,切莫直接抄袭!
- 1-
cconfig后,vim sys_config.fex- 2- 设置debug口为uart0

- 3- 设置其它的串口(和GPIO做对应)
3)串口检测
串口已经配置完成,那如何验证自己配置的串口是否成功了呢?
方法其实很多,可借助PC的串口调试工具等!
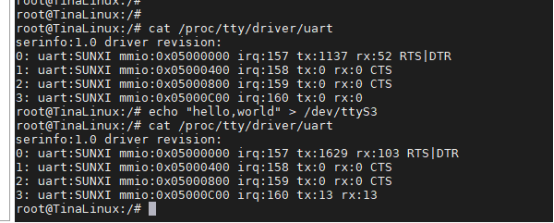
但是最简单的方式,其实是将Rx和Tx进行短接,然后用Rx发送数据,看Tx是否能接收的到,具体操作如下(以uart3为例):
注意:进行下列步骤前,务必保证对应串口已经初始化!!!
① 将Rx和Tx进行连接:这真是一个天才的想法,不要崇拜哥
② 实时检测串口的Rx:cat /dev/ttyS3 &
③ 使用Tx发送数据:echo "11223344556677889900" > /dev/ttyS3
查看Rx和Tx收到的数据数量:
cat /proc/tty/driver/ua
4)串口测试C++源码
留言单发
4. LEDC
用于控制LED,使得LED可以常亮、灭、闪烁、呼吸。
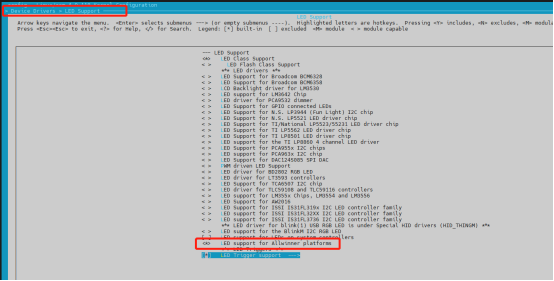
1)系统支持
make kernel_menuconfig
Device Drivers
└─>LED_Support
└─>LED support for Allwinner platforms
2)系统配置
cdevice后,vim sys_config.fex,根据硬件原理图进行配置