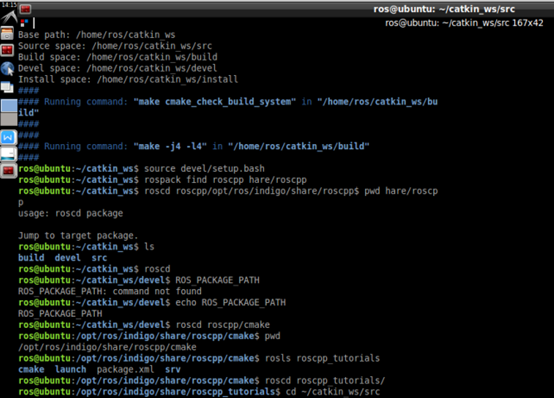
使用catkin_create_pkg创建一个新的catkin程序包。
换到之前创建的catkin工作空间中的src目录下,
使用catkin_create_pkg命令来创建一个名为'myPKG'的新程序包,这个程序包依赖于std_msgs和roscpp
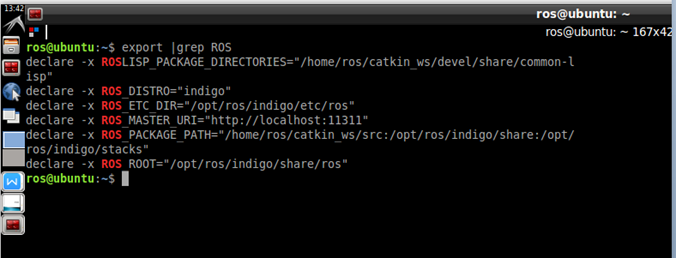
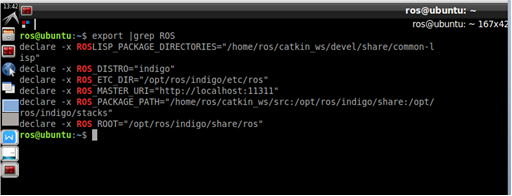
环境配置在Ubuntu中的操作指令:$ source /opt/ros/indigo/setup.bash。


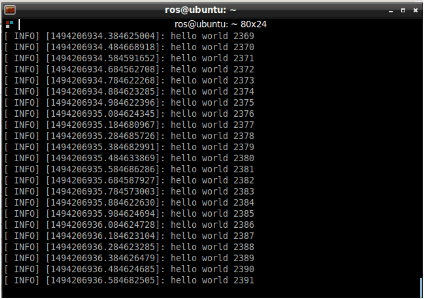
创建talker.cpp和listener.cpp,完成程序传递消息,消息为“Hello world”。
- 新建exp6程序包(依赖)
- 建立.msg文件
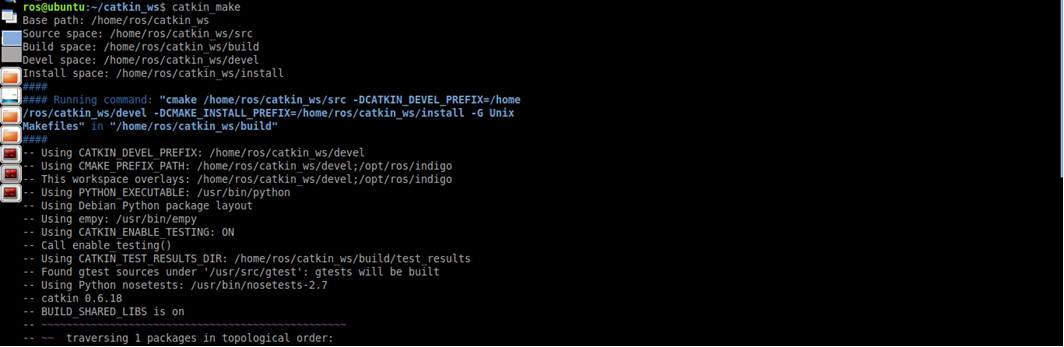
- 编译.msg文件(CMakeLists.txt)
- 建立talker.cpp文件,修改代码
- 建立listener.cpp文件,修改代码
- 编译(CMakeLists.txt)
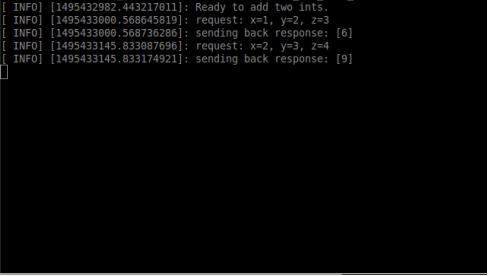
- 执行


编写Service和Client程序,实现三个整数的相加