3.1 线性回归
回归(regression)是能为一个或多个自变量与因变量之间关系建模的一类方法。 在自然科学和社会科学领域,回归经常用来表示输入和输出之间的关系。
3.1.1 线性回归的基本元素
这一部分主要是各种原理及公式,还是需要直接去阅读全文~
总结部分要点如下:
- 线性回归的前提假设
假设自变量X和因变量y之间的关系是线性的, 即y可以表示为X中元素的加权和,这里通常允许包含观测值的一些噪声;
其次,我们假设任何噪声都比较正常,如噪声遵循正态分布。 - 公式的表示
由于在机器学习领域通常使用的是高纬数据集,建模时使用线性代数表示法会比较方便。
预测值可以从 $ y = w_1x_1 + ...+ w_dx_d+b $ 转为 $ y = Xw+b $ 表示。 - 损失函数(loss function)
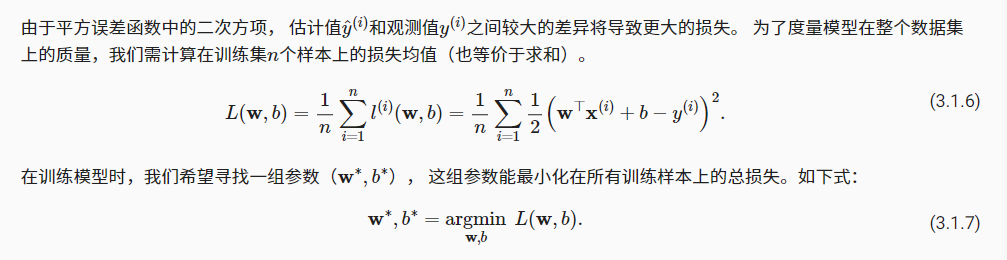
损失函数(loss function)用于量化实际值与预测值间的差距,通常取负数,以符合数值越小损失越小的概念。
- 梯度下降(gradient descent)
本书中我们用到一种名为梯度下降的方法,这种方法几乎可以优化所有深度学习模型。它通过不断地在损失函数递减的方向上更新参数来降低误差。
- 梯度下降
梯度下降最简单的用法是计算损失函数(数据集中所有样本的损失均值)关于模型参数的导数(在这里也可以称为梯度) - 小批量随机梯度下降(minibatch stochastic gradient descent)
在每次需要计算更新的时候随机抽取一小批样本进行计算,是普通梯度下降的变种,可以减少计算量快速收敛
- 超参数与调参
- 超参数(hyperparameter)
可以调整但不在训练过程中更新的参数,如学习率(learning rate)、批量大小(batch size) - 调参(hyperparameter tuning)
是选择超参数的过程,超参数通常是我们根据训练迭代结果来调整的,而训练迭代结果是在独立的验证数据集(validation dataset)上评估得到的
- 泛化(generalization)
线性回归恰好是一个在整个域中只有一个最小值的学习问题。但是对像深度神经网络这样复杂的模型来说,损失平面上通常包含多个最小值。深度学习实践者很少会去花费大力气寻找这样一组参数,使得在训练集上的损失达到最小。
事实上,更难做到的是找到一组参数,这组参数能够在我们从未见过的数据上实现较低的损失,这一挑战被称为泛化(generalization)。 - 预测(prediction)
给定“已学习”的线性回归模型 $ y = Xw+b $ ,现在我们可以通过房屋面积和房龄来估计一个(未包含在训练数据中的)新房屋价格。
给定特征估计目标的过程通常称为预测(prediction)或推断(inference)。
3.1.2 矢量化加速
在训练模型时,我们经常希望能够同时处理整个小批量的样本。
为了实现这一点,需要我们对计算进行矢量化,从而利用线性代数库,而不是在Python中编写开销高昂的for循环。
n = 10000
a = torch.ones([n])
b = torch.ones([n])
d = a + b # 使用重载的+运算符来计算按元素的和
矢量化代码通常会带来数量级的加速。这一操作类似于在 pandas 中处理数据时,使用行/列操作的效率远远高于单独对每个单元格进行操作。
3.1.3 正态分布与平方损失
正态分布(normal distribution),也称为高斯分布(Gaussian distribution),若随机变量\(x\)具有均值\(\mu\)和方差\(\sigma^2\)(标准差\(\sigma\)),其正态分布概率密度函数如下:
均方误差损失函数(简称均方损失)可以用于线性回归的一个原因是:我们假设了观测中包含噪声,其中噪声服从正态分布。
噪声正态分布如下式:
其中,\(\epsilon \sim \mathcal{N}(0, \sigma^2)\)。
因此,我们现在可以写出通过给定的\(\mathbf{x}\)观测到特定\(y\)的似然(likelihood):
现在,根据极大似然估计法,参数\(\mathbf{w}\)和\(b\)的最优值是使整个数据集的似然最大的值:
根据极大似然估计法选择的估计量称为极大似然估计量。
虽然使许多指数函数的乘积最大化看起来很困难,但是我们可以在不改变目标的前提下,通过最大化似然对数来简化。由于历史原因,优化通常是说最小化而不是最大化。我们可以改为最小化负对数似然\(-\log P(\mathbf y \mid \mathbf X)\)。
由此可以得到的数学公式是:
现在我们只需要假设\(\sigma\)是某个固定常数就可以忽略第一项,因为第一项不依赖于\(\mathbf{w}\)和\(b\)。
现在第二项除了常数\(\frac{1}{\sigma^2}\)外,其余部分和前面介绍的均方误差是一样的。
幸运的是,上面式子的解并不依赖于\(\sigma\)。
因此,在高斯噪声的假设下,最小化均方误差等价于对线性模型的极大似然估计。
3.1.4 从线性回归到深度网络
我们可以将线性回归模型视为仅由单个人工神经元组成的神经网络,或称为单层神经网络。
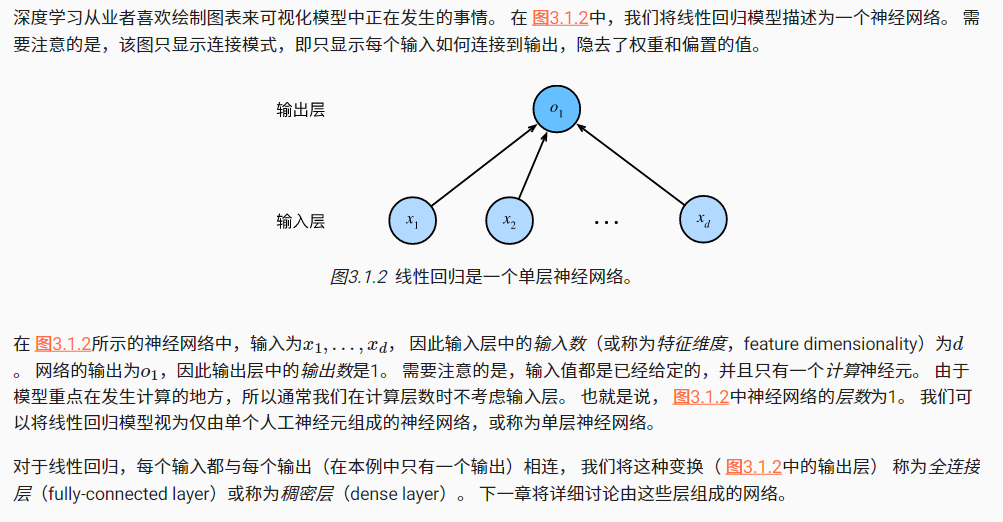
- 特征维度(feature dimensionality):输入层中的输入数
- 层数:由于模型重点在发生计算的地方,所以通常我们在计算层数时不考虑输入层
- 全连接层(fully-connected layer)/ 稠密层(dense layer):每个输入都与每个输出(在本例中只有一个输出)相连
3.1.5 总结
当今大多数深度学习的研究几乎没有直接从神经科学中获得灵感。我们援引斯图尔特·罗素和彼得·诺维格在他们的经典人工智能教科书Artificial Intelligence:A Modern Approach :cite:Russell.Norvig.2016中所说的:虽然飞机可能受到鸟类的启发,但几个世纪以来,鸟类学并不是航空创新的主要驱动力。
同样地,如今在深度学习中的灵感同样或更多地来自数学、统计学和计算机科学。
- 机器学习模型中的关键要素是训练数据、损失函数、优化算法,还有模型本身
- 矢量化使数学表达上更简洁,同时运行的更快
- 最小化目标函数和执行极大似然估计等价
- 线性回归模型也是一个简单的神经网络