不得不承认,我的写作方式就是“单任务模式”。一项任务没完成之前,其它的工作只能不断推后;一个话题没聊完之前,其它的话题也无心开写,因此只能是在不断的暂停与继续的节奏下不定期进行更新。回头一看,上一板斧丟出来,已经是将近两个月的时间了,乘着假期赶紧把后续的动作完成一下,就可以安心做其它的安排了。
今天要聊的话题是飞越转弯衔接DF航段的保护区算法。

前文已经提到,风螺旋的切线与转弯角度是一一对应关系,如果用θ表示转弯角度,用DA来表示偏流角,那么切线的方向就等于θ-DA+90°。这是风螺旋计算的关键心法,其它的变化也只是这一招式的转换而已。
招式一 目不转睛
关于飞越转弯我们要解决什么样的问题?
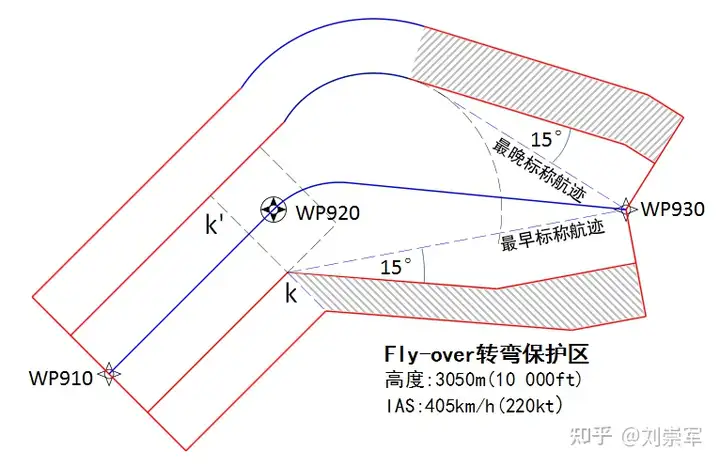
如上图所示,飞越转弯的外边界直接由风螺旋构成,再加上平滑外扩15°的切线,与后续航段相衔接,形成DF(Direct to Fix直飞)航段的保护区。外扩15°的计算是其中的基础问题,也是我们首先要解决的问题。
最晚标称航迹的角度目前在算法中,只能通过迭代计算的方式来实现,这个角度一旦确定,就可以得到对应的转弯角度θa,比θa小15°的角度为θa-15°。由于风螺旋切线与转弯角度是一一对应关系,因此,可知θa-15°所对应的切线必然与最晚标称航迹夹角为15°。
规范中的描述是找出最晚标称航迹,将它外扩15°,然后倒退与风螺旋形成切线。从我们的算法来说,是从切线向内找到转弯角度θa,然后再由内而外得到外扩15°的切线,路径不同,表达方式不同,但对应相同的结果。在这个过程中一定是紧盯最晚标称航迹,以它为基准来判断切线是否准确,这一招就称为目不转睛。
招式二:乾坤挪移
转弯角度变大以后,切线的计算有哪些变化?
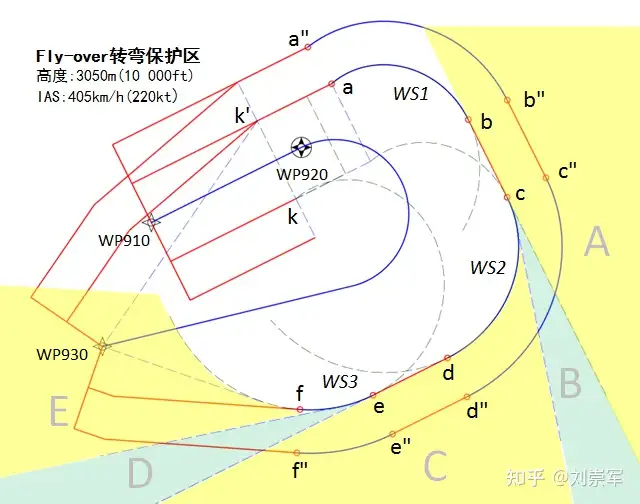
如上图所示,我们以一个大于180°的DF转弯保护区为例,来观察切线的变化。
首先,当转弯的终点位于A区的时候,转弯保护区只与风螺旋WS1有关,属于典型的小角度转弯情况。
当转弯终点位于B区的时候(B区的范围为15°夹角),由于存在切线需要“后退15°”的情况,因此,最晚标称航迹通过风螺旋WS2来获得,保护区的切线则由风螺旋WS1来承担。
WS1、WS2是两条初始条件相同的风螺旋,因此,b点与c点代表的是角度值为DA+90°的公切线所在位置。
d点与e点是转弯180°时的风螺旋的公切线,对应的角度值为DA+180°。转弯结束点位于C区时,外扩的15°切线只与WS2有关。
若转弯角度继续增大,转弯结束点位于D区时,最晚标称航迹由WS3决定,外扩的切线产生于WS2。
转弯结束点位于E区时,外扩切线产生于WS3。
位置点与θ角度值的对应关系如下图所示:

从上图中可以看到,在飞越转弯的切点计算中,计算方法是相似的,主要的差别在于转弯结束点所在的区域,不同的区域,会有不同的形态,但本质上没有太大分别,所以这一招式起名为乾坤挪移。
以上内容参见2020年民航大学学报《基于风螺旋的飞越转弯保护区定义算法》,欢迎转发及引用。
已经收到业内朋友们的反馈,说最近的文章开始看不懂了。“三板斧”系列的文章对于设计师来说,属于拓展阅读类型的资料,毕竟目前相关内容还不属于规范,它相当于对规范进行了数学性质的分析,只是画得更精确了一些,仅做了解即可。
对于软件研发人员来说,建议多去了解掌握相关算法,如果做出的软件既不精确、效率还差,那就真的有些走弯路了。
如果贵公司缺少研发人员,又需要相关的软件产品,倒也不用担心,我们有现成的软件产品可供选择,甚至可以帮着联系一下研发团队来进行定制开发。
从行业发展趋势来看,风螺旋在未来最有可能会被类似RF转弯的设计方式所取代。对我本人而言,最大的可能是随着时间的推移,会在某一天慢慢就开始忘记了曾经谙熟于心的细节。因此,在尽可能技术开放的前提下,我想多聊一聊相关的计算思路和细节,帮助到更多愿意投入到飞行程序设计研发领域的人。这样,即使某一天相忘于江湖了,也没有遗憾。
任何技术层面的“先进”都只会是暂时的、阶段性的,过了那个阶段,过了那个时期,很多“先进”的东西,可能就会被淘汰,或是成为常识。与其等着知识变得陈旧,倒不如更开放一点,让技术更迭的速度来得更快一些。说回到飞行程序设计的初心和使命,能有什么会比安全和高效来得更重要呢?