1.filters
(1)The pcl_filters library contains outlier and noise removal mechanisms for 3D point cloud data filtering applications.
包含离群值和去噪音机制 ,用于3D点云数据滤波应用。
(2)PCL点云格式分为有序点云和无序点云
- 针对有序点云提供了双边滤波、高斯滤波、中值滤波等
- 针对无序点云提供了体素栅格、随机采样等
是根据传感器的采集数据上来说
- 一般深度相机采集到的点云的数据是有序点云
- 而我们激光雷达采集的点云的数据是无序的点云
2.features
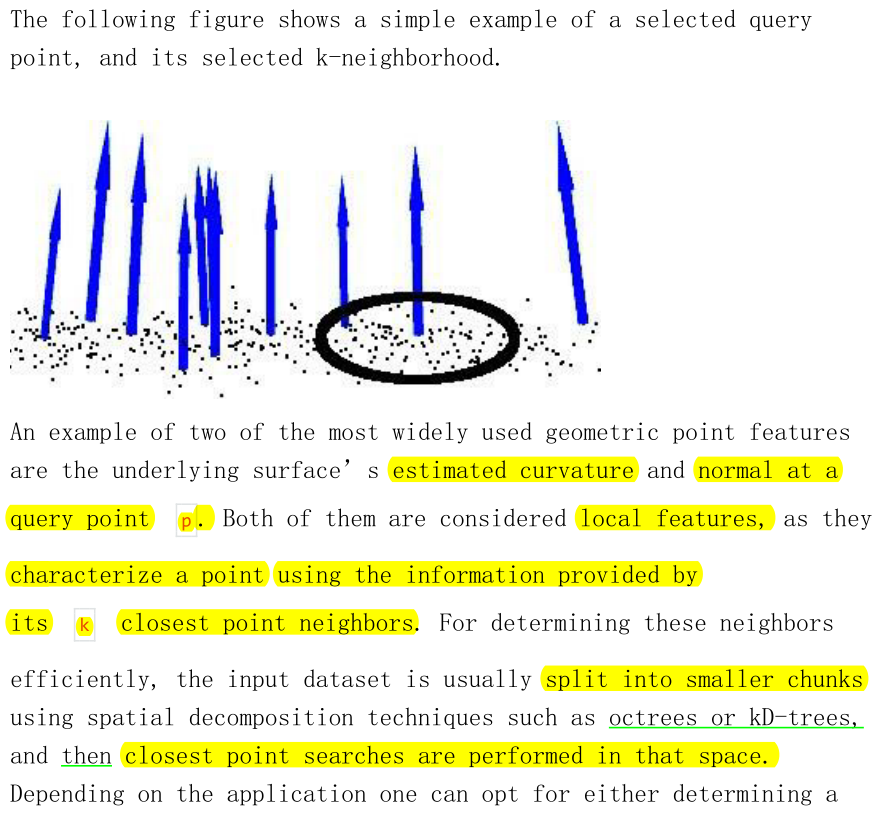
The features library contains data structures and mechanisms for 3D feature estimation from point cloud data. 3D features are representations at certain 3D points, or positions, in space, which describe geometrical patterns based on the information available around the point. The data space selected around the query point is usually referred to as the k-neighborhood.

3.keypoints

- Overviewdistributed overview pytorch wordpress overview restful api diagnostic the overview hottest genome-wide association overview learning reference technical neoverse overview libraries overview graphs python engineer overview supplies 230501 operating overview system teaching machine overview of overview course shell the