在主文件夹中打开终端,输入命令:mkdir -p catkin_ws1/src

在主文件夹中就创建了一个名为catkin_ws1的文件夹,打开ws1文件夹里面还有一个名为src的文件夹


通过命令初始化创建工作空间,进入到catkin_ws1/src中(输入命令:cd catkin_ws1/src/)输入命令catkin_init_workspace

在src文件夹里就有了CMakeLists.txt这个文件

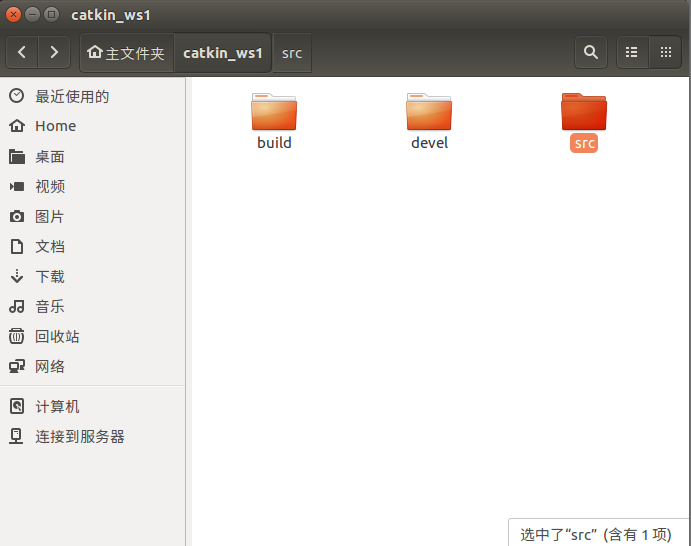
回到上级目录(输入命令:cd ..)输入命令:catkin_make 编译一下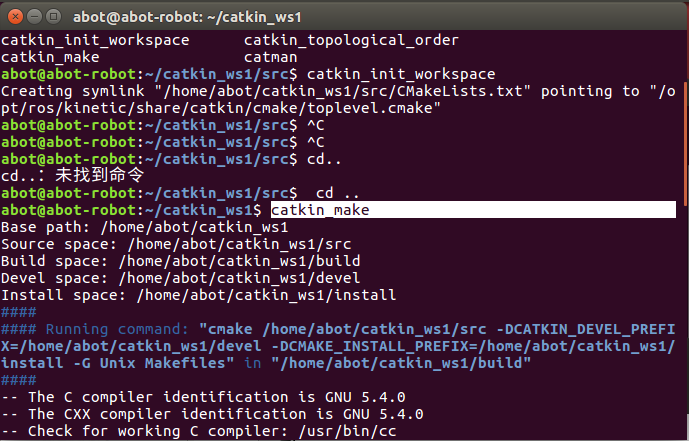
就可以得到两个文件夹,如图示:
设置环境变量,输入命令:source devel/setup.bash命令
再检查一下是否成功,输入echo $ROS_PACKAGE_PATH 命令

想要设置长期环境变量,而不用每次打开一个终端就要设置一下,我们可以打开终端输入gedit .bashrc命令
会跳出一个文件,划到最后输入一行代码source ~/catkin_ws1/devel/setup.bash

这样每次开机就可以自动设置环境变量了
输入命令:catkin_create_pkg learning_communication std_msgs rospy roscpp 创建功能包

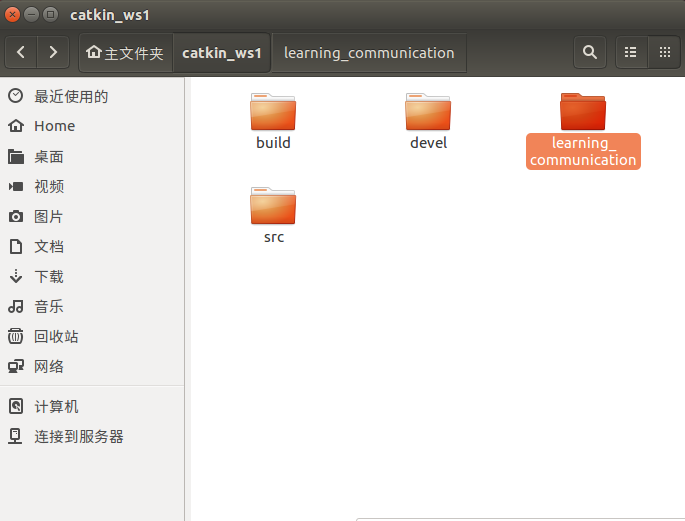
输入catkin_make命令,设置一下
把文件复制到相应的地方
把以下代码放到以下位置
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
# add_dependencies(talker ${PROJECT_NAME}_generate_messages_cpp)
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
# add_dependencies(talker ${PROJECT_NAME}_generate_messages_cpp)
在catkin_ws1里的build里会有两个程序
