0 写在前面
最重要的,不是别人有没有爱我们,而是我们值不值得被爱。 ——戴尔·卡耐基
1 内容介绍
参数估计和跟踪功能:雷达检测到目标后,需要继续检测目标;根据雷达观测估计目标参数位置、大小、运动等;将检测与特定目标相关联;使用范围、角度和多普勒测量,确定所有这些附近的探测是否来自同一个目标:预测未来目标的位置;使用多个观测值对目标轨迹进行更准确的滤波估计。
跟踪雷达:

2 参数估计
雷达参数估计:位置:方位、俯仰、距离;尺寸:RCS 、径向范围(长度)、横向范围(宽度);运动:径向速度、径向加速度、旋转、旋转进动(Precession)、弹道系数等。

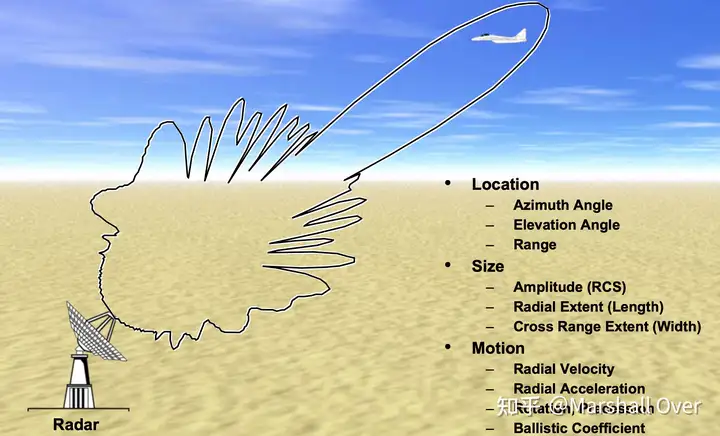
参数估计:主要度量参数是距离、角度和多普勒速度。

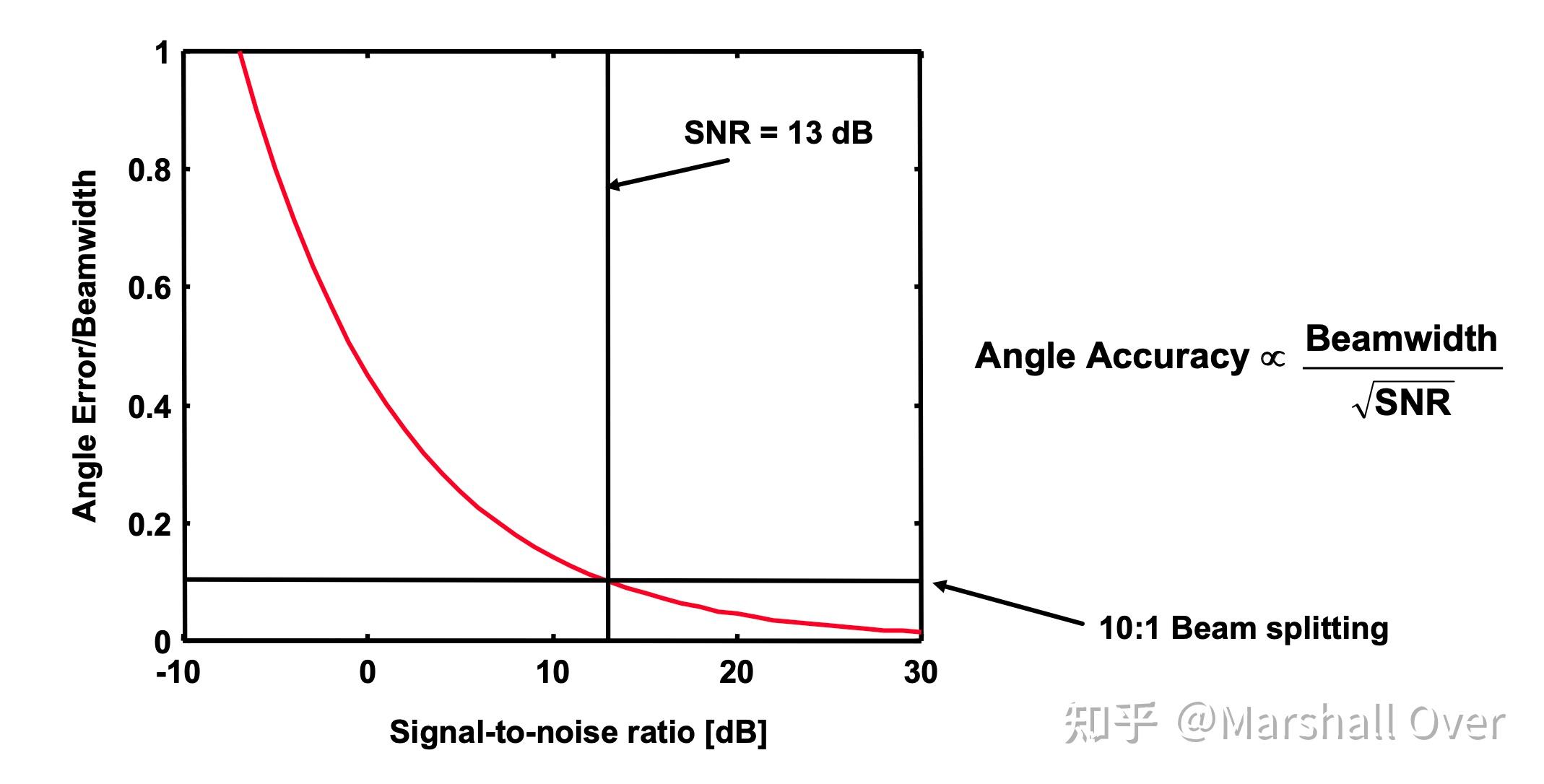
随着信噪比(SNR)的增加,精度提高:\sigma \propto \frac{resolution}{\sqrt{SNR}}。
基本方法:重叠测量,距离划分、单脉冲技术、多普勒仓分割(Doppler bin splitting)。

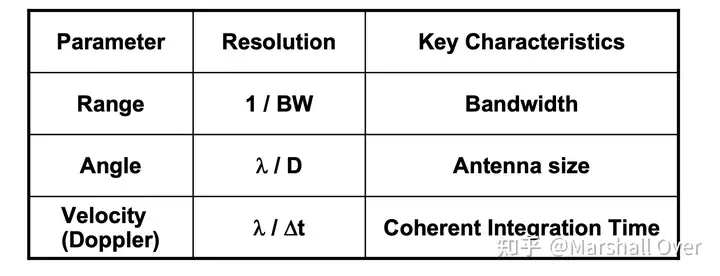
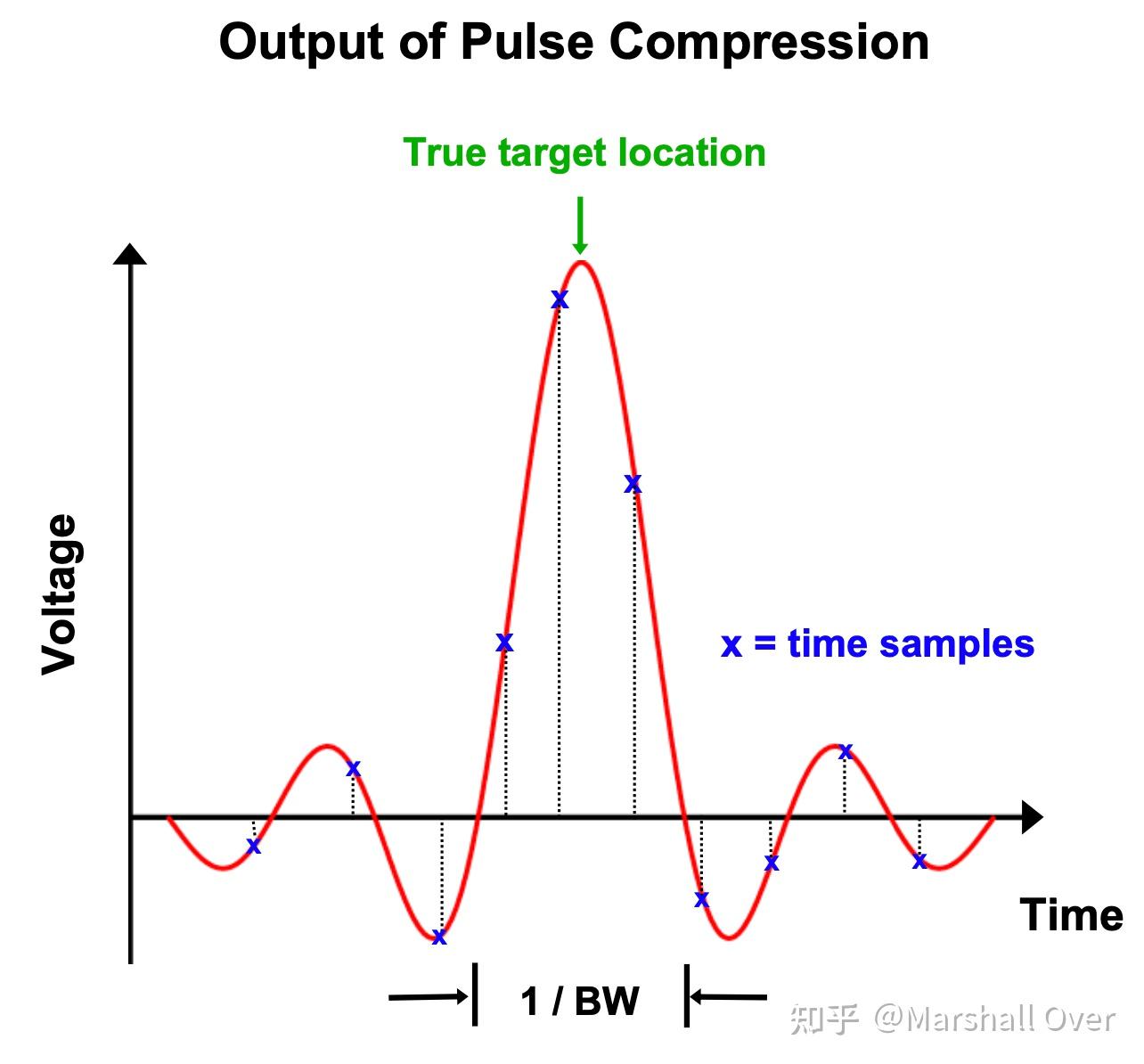
距离估计:距离估计使用多个时间样本进行峰值拟合,以实现更高的精度;距离估计精度随着带宽的增加而提高; Range \quad accuracy \propto \frac{1}{BW} \cdot \frac{1}{\sqrt{SNR}} 。

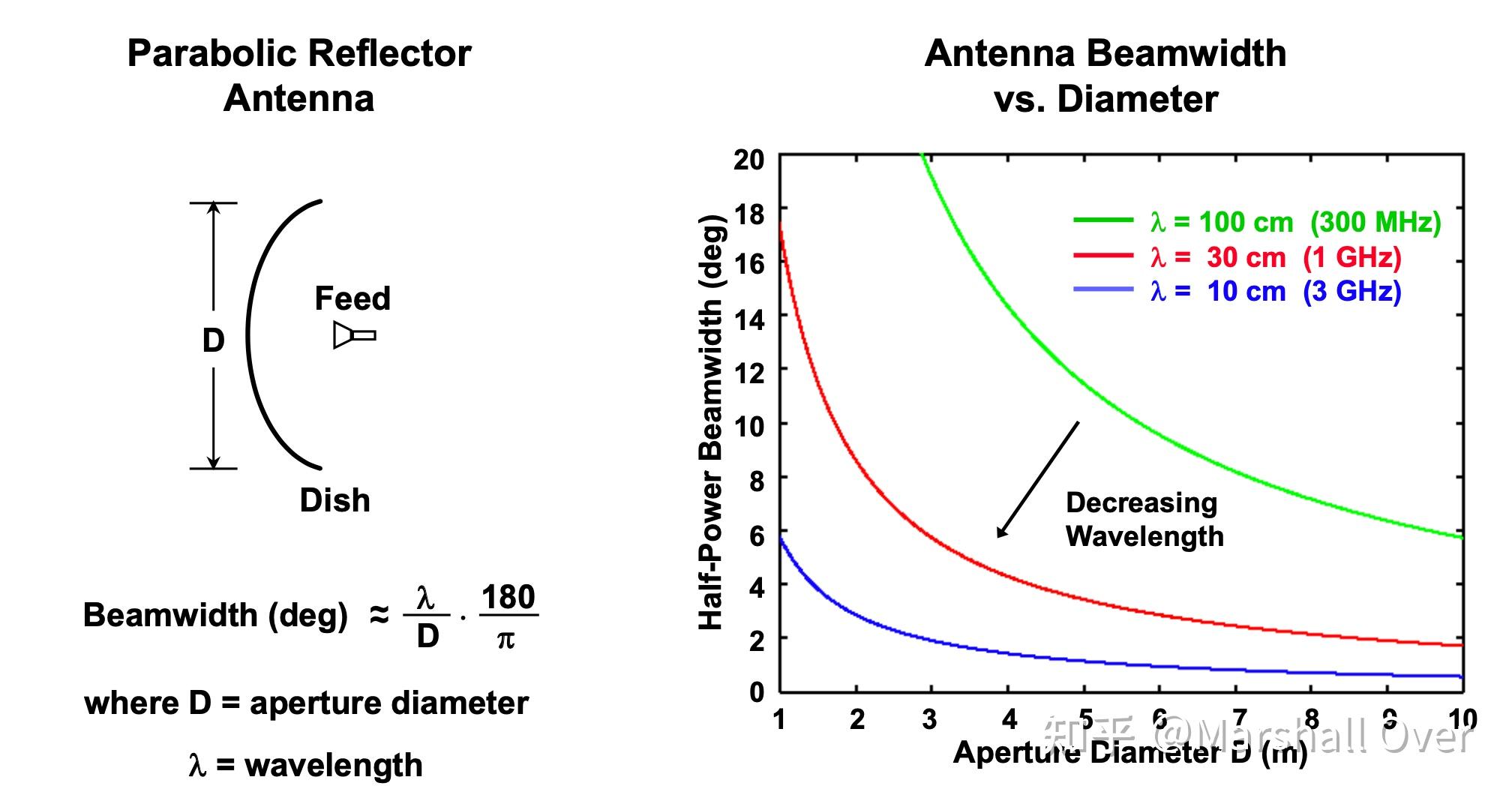
波束宽度:大天线孔径减小波束宽度。Ability to resolve target directly impacts ability to estimate target location。

角度估计:检测提供角度上的粗略定位,在天线波束宽度内隔离。通常需要更高的精度:100公里处的1度延伸1745米!角度估计使用不同波束位置的测量值以获得更高的精度。

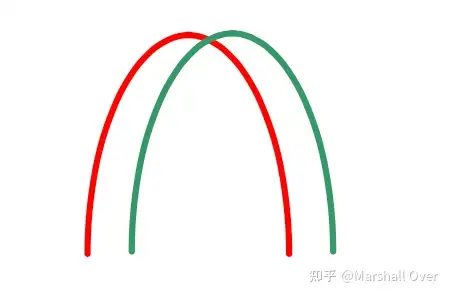
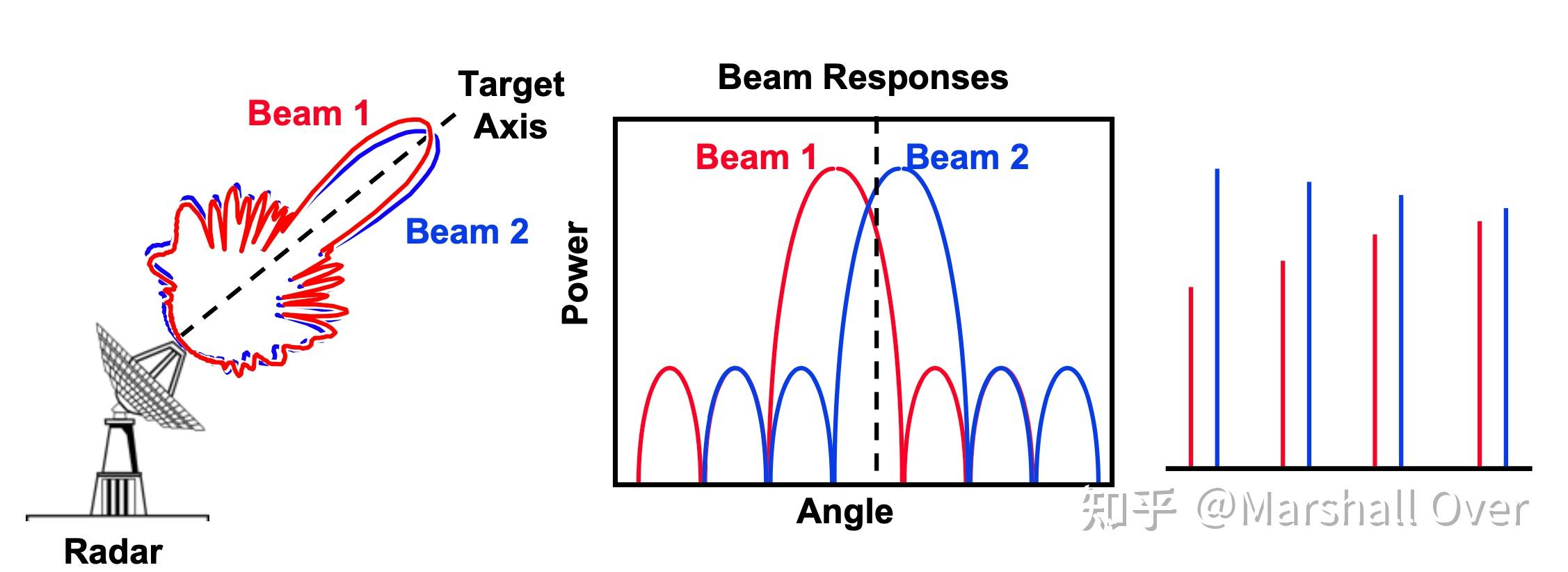
序列波束雷达(Sequential Lobing Radar):指向轨道位置周围的波束的时间序列(下面显示了两个);将单个接收器硬件重新用于多个波束;控制回路重定向轨道位置,以均衡波束响应。
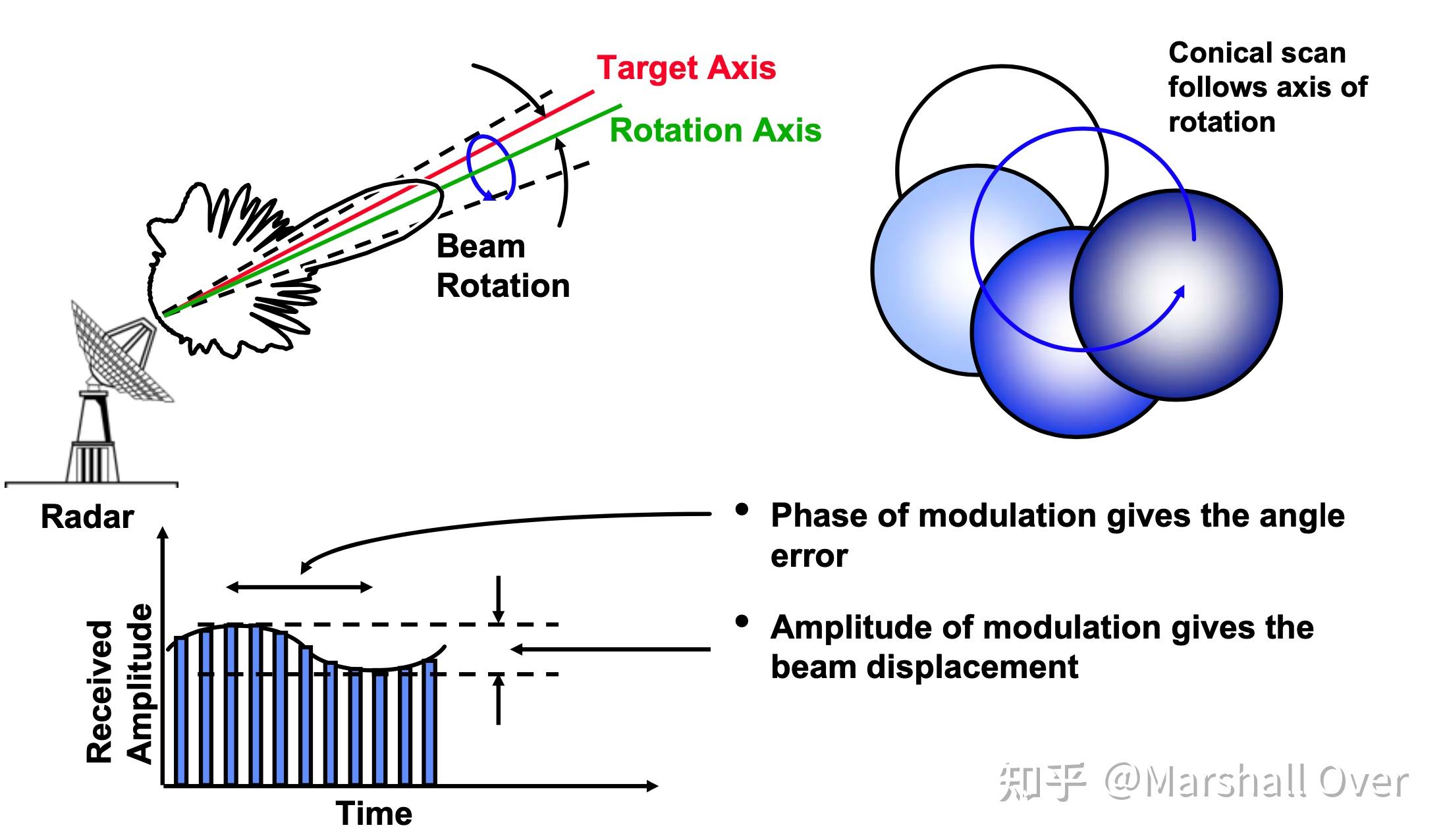
锥形扫描跟踪:调制相位产生角度误差;调制幅度给出波束偏移。

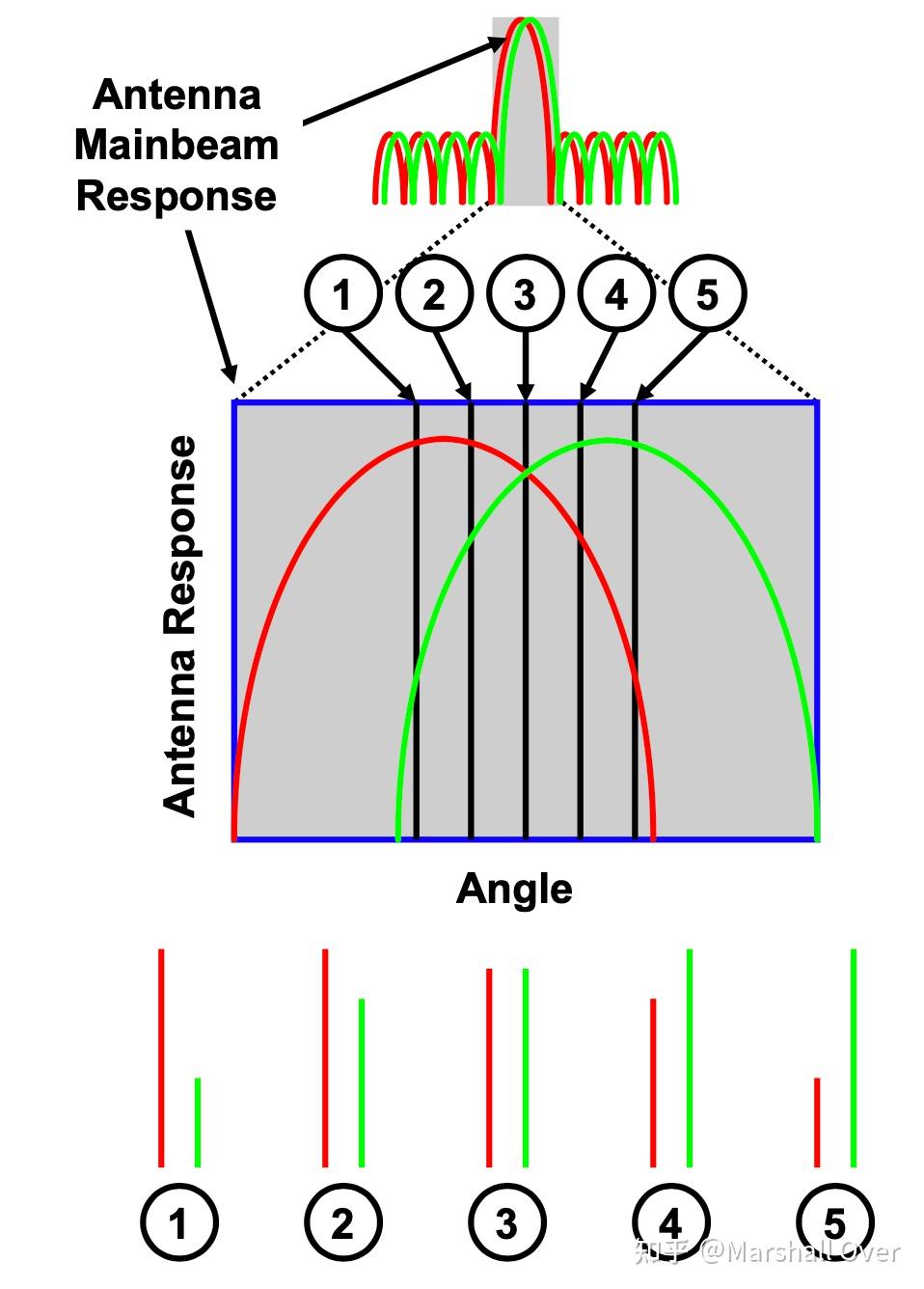
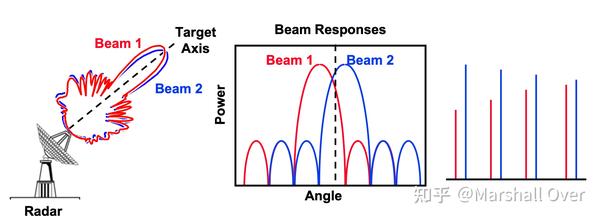
单脉冲角度估计:单脉冲角度估计比较两个或多个同时接收波束;两个斜视光束的和差用于生成误差信号;每个通道都需要一个单独的接收器。与锥形扫描和序列波束相比,单脉冲提高了性能,序列波束的性能随着雷达回波的时变而下降。单脉冲测量可以通过两种方法进行:振幅比较(更常用)和相位比较。

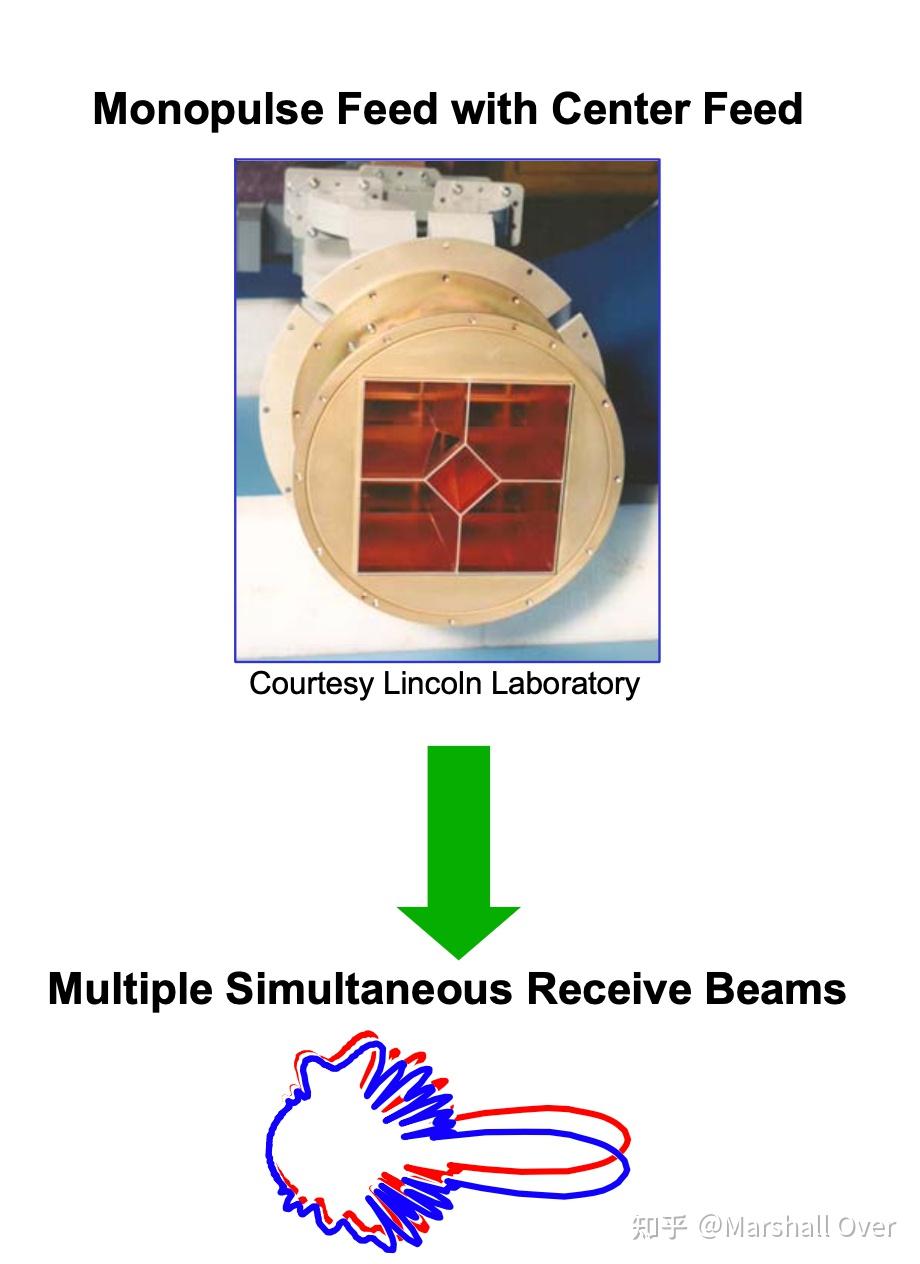
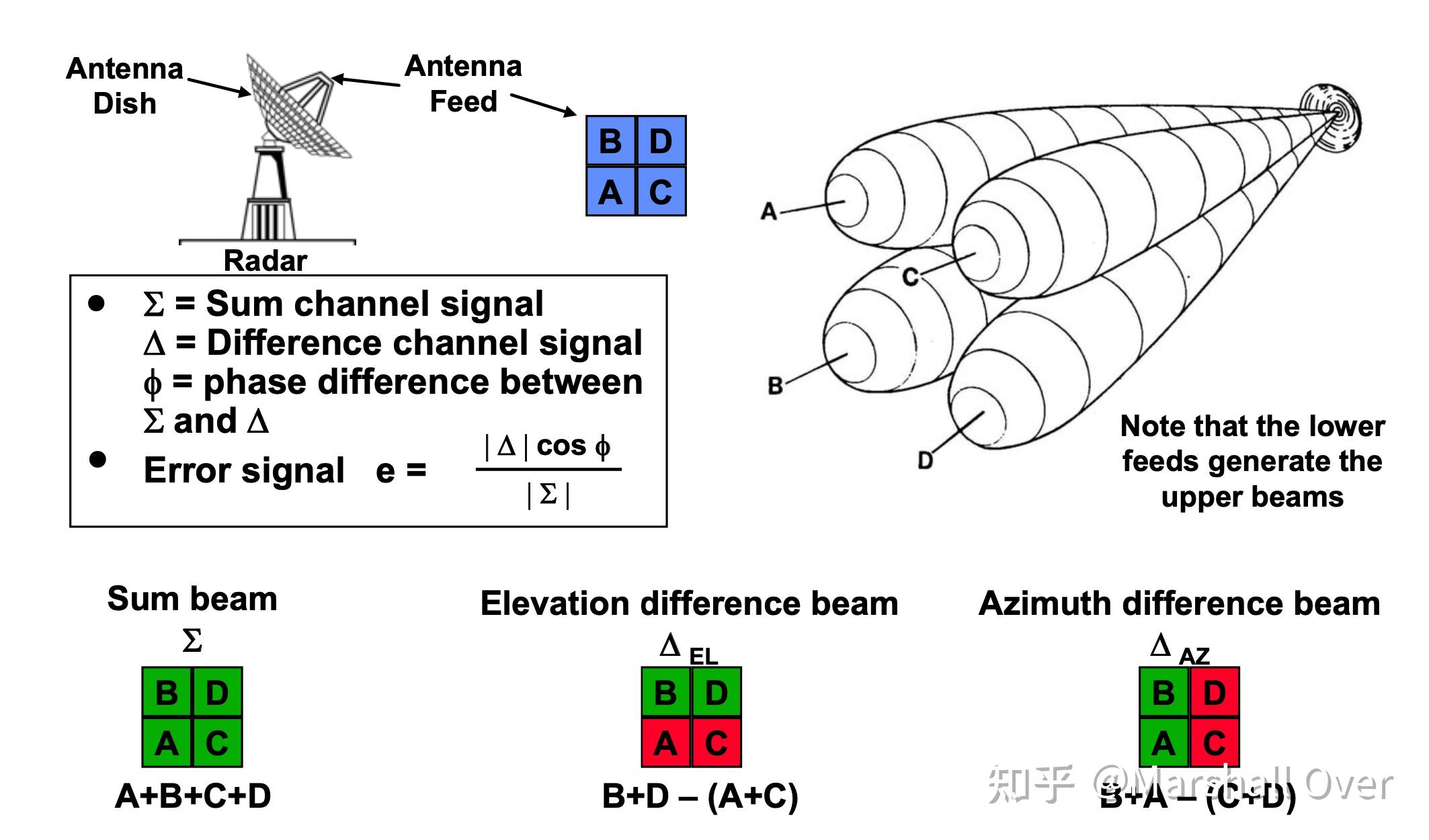
单脉冲比幅方法:用于确定目标相对于天线瞄准线的位置的偏移接收波束对(误差信号);用于将天线瞄准线重新转向目标的误差信号。通常,通过使用两个稍微偏离抛物面反射器焦点的馈源来产生两个偏移接收光束。两个斜视光束的和差用于生成误差信号。

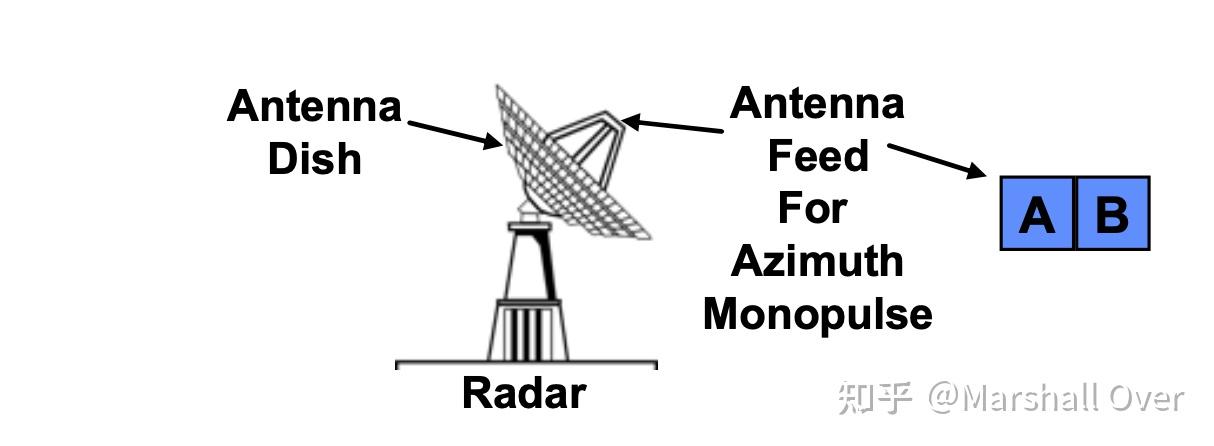
单脉冲比幅波束生成方法:接收指向略微不同角度的两个波束,比如偏离波束宽度的30%;生成和差信号。

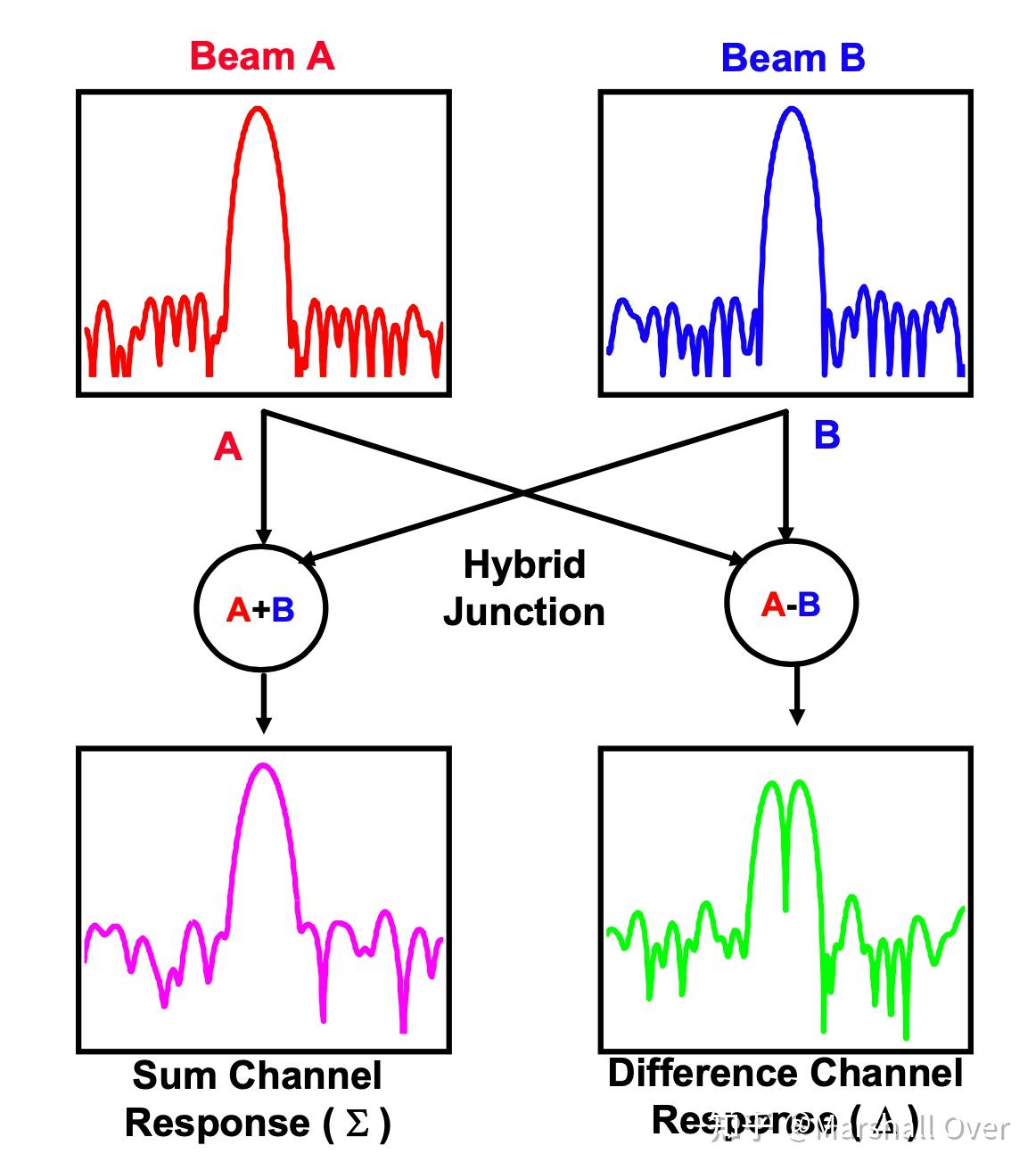
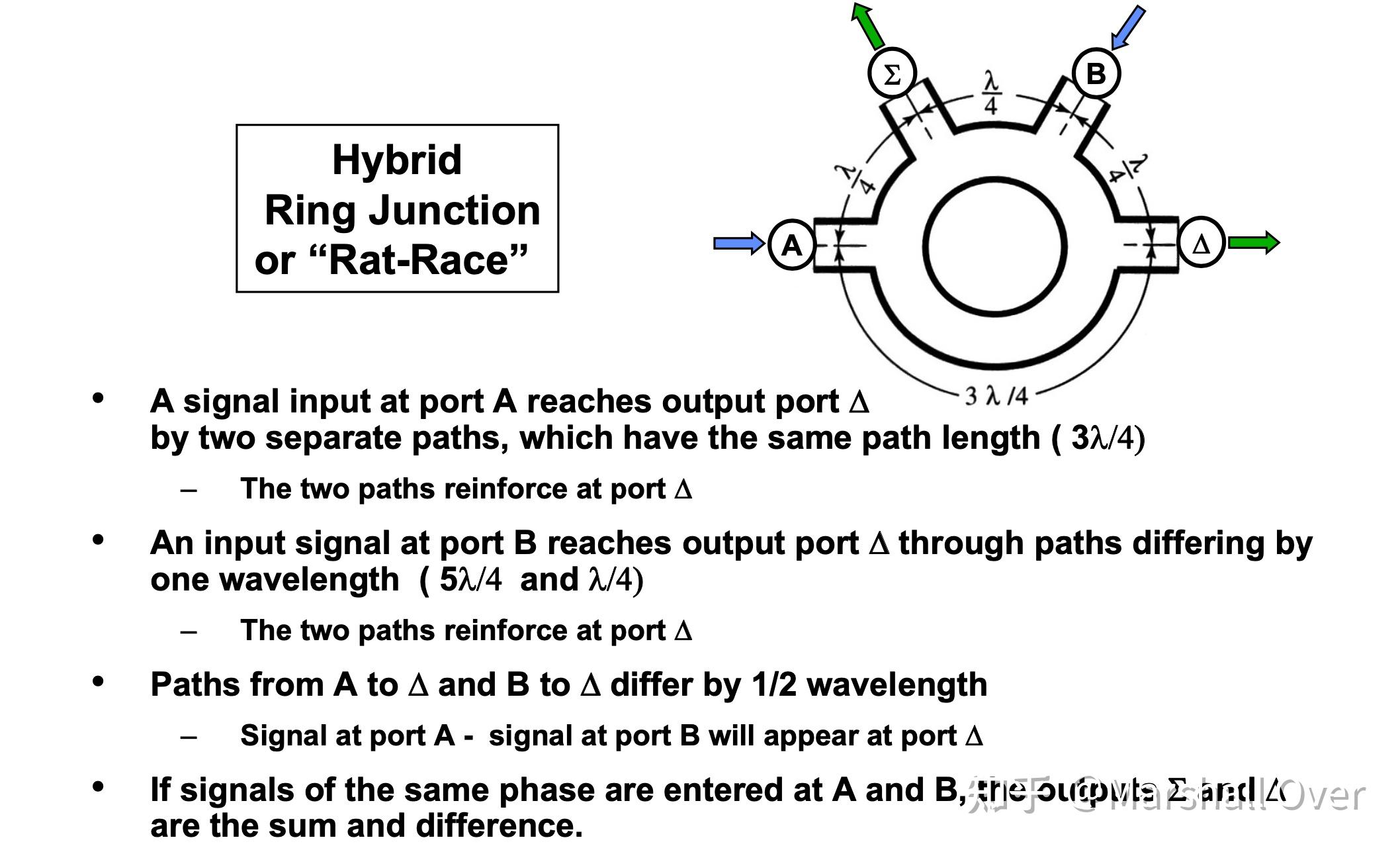
用于单脉冲雷达的混合结(Hybrid Junctions ):

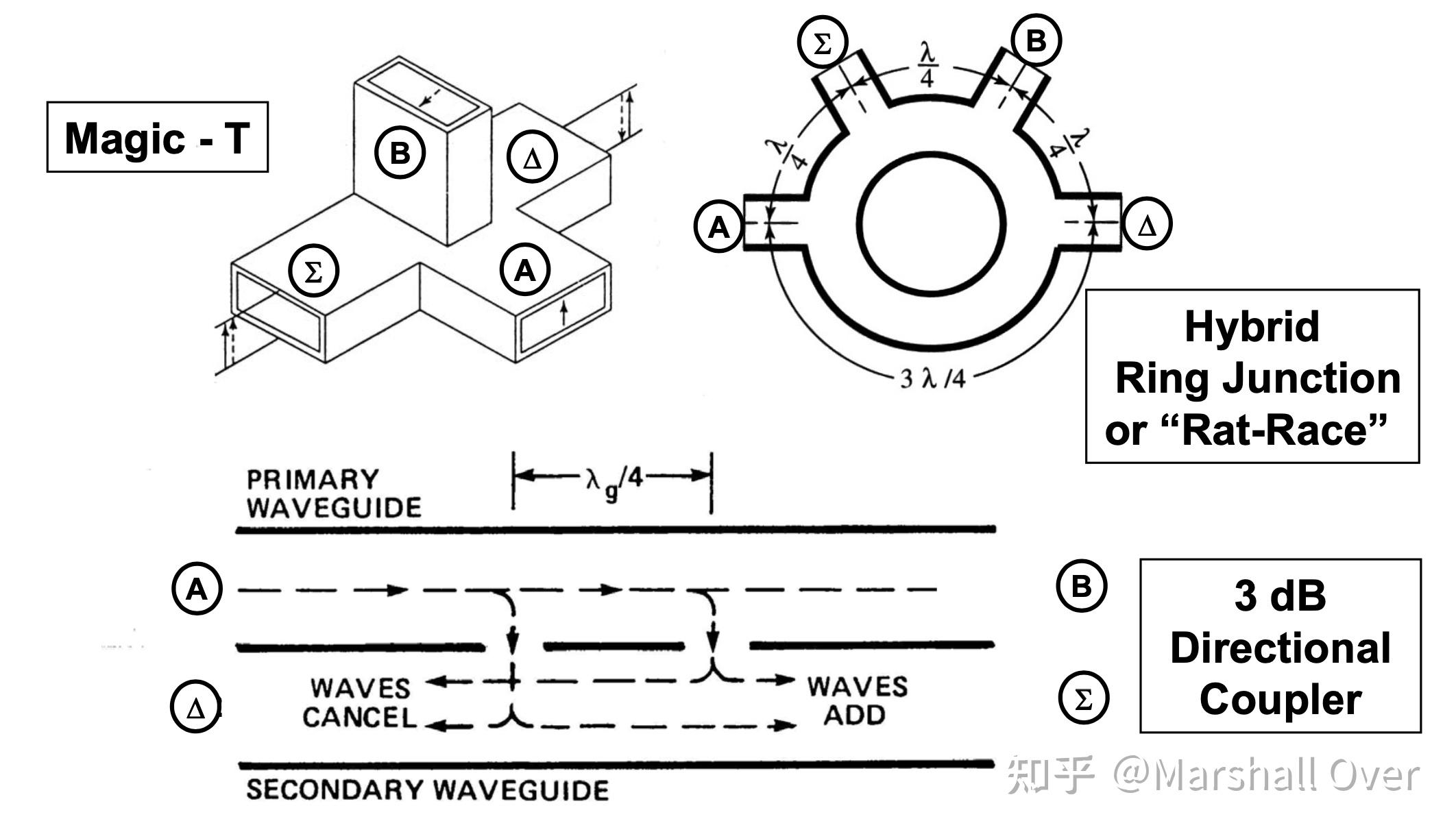
Example of Hybrid Junction:

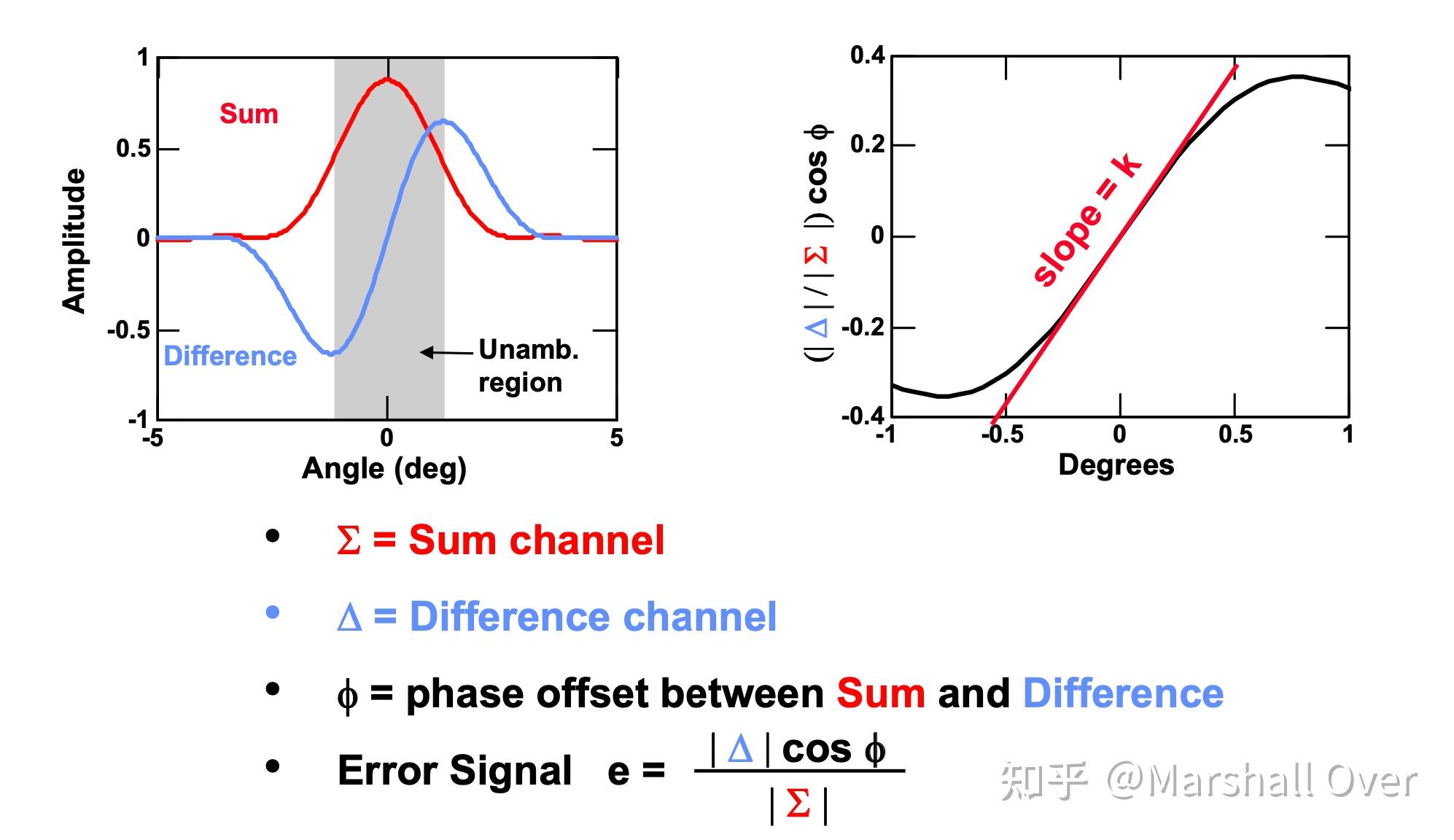
单脉冲方程:误差信号是测量目标偏离瞄准线大小的测度。

二维单脉冲:

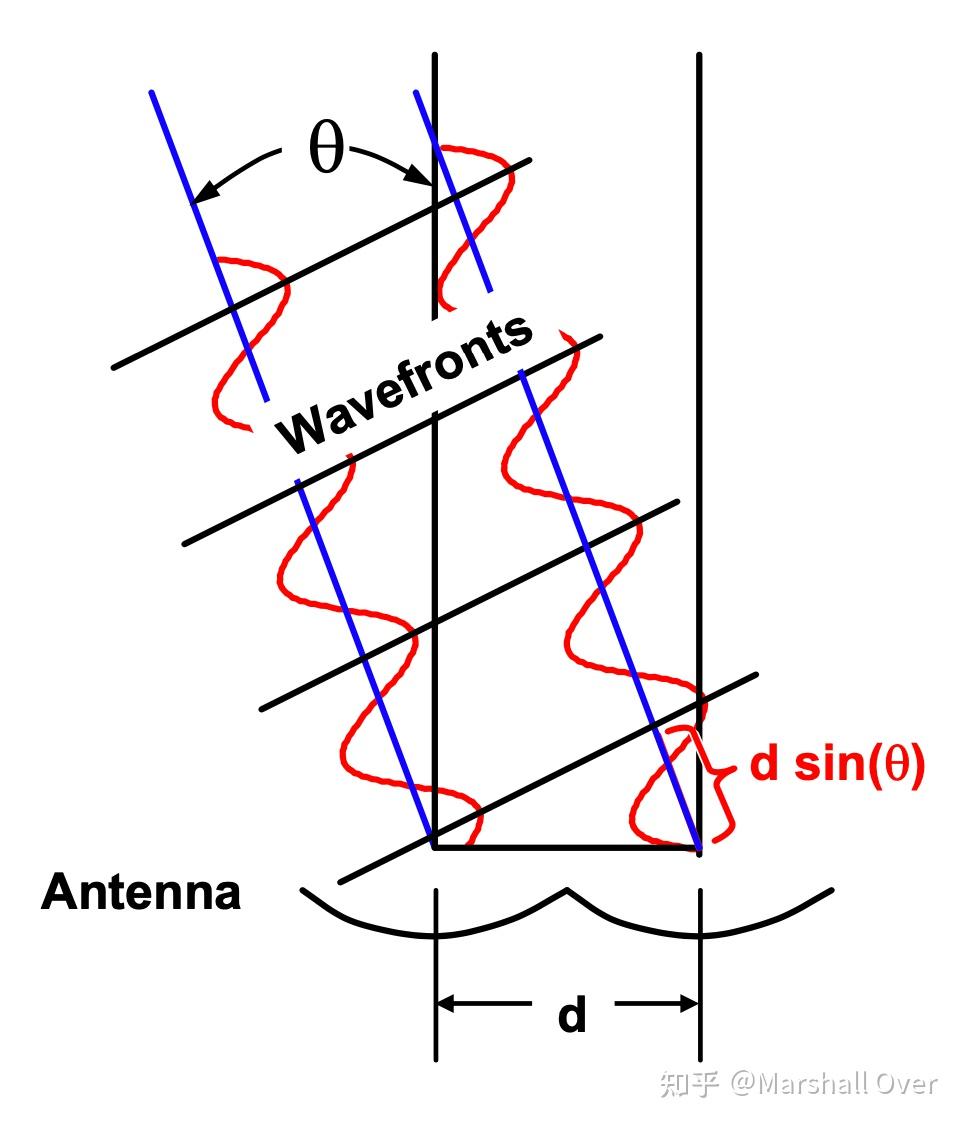
比相单脉冲:相位比较单脉冲也称为“干涉雷达”。两个天线从同一目标方向接收。与接收不同方向波束的振幅比较单脉冲不同。接收到的目标回波相位变化:2\pi d \sin \theta /\lambda。

扫描雷达角度估计:多脉冲角度估计。

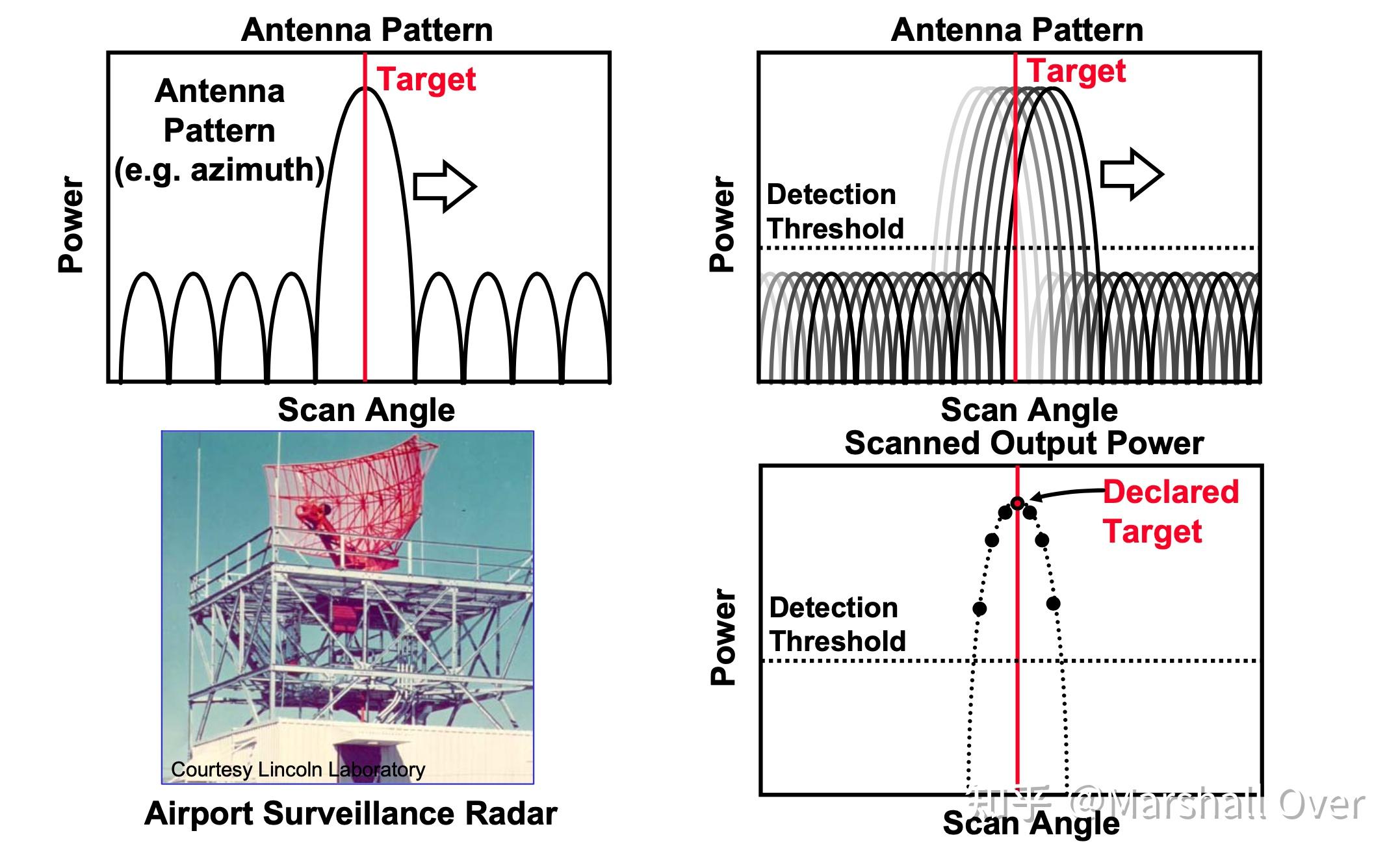
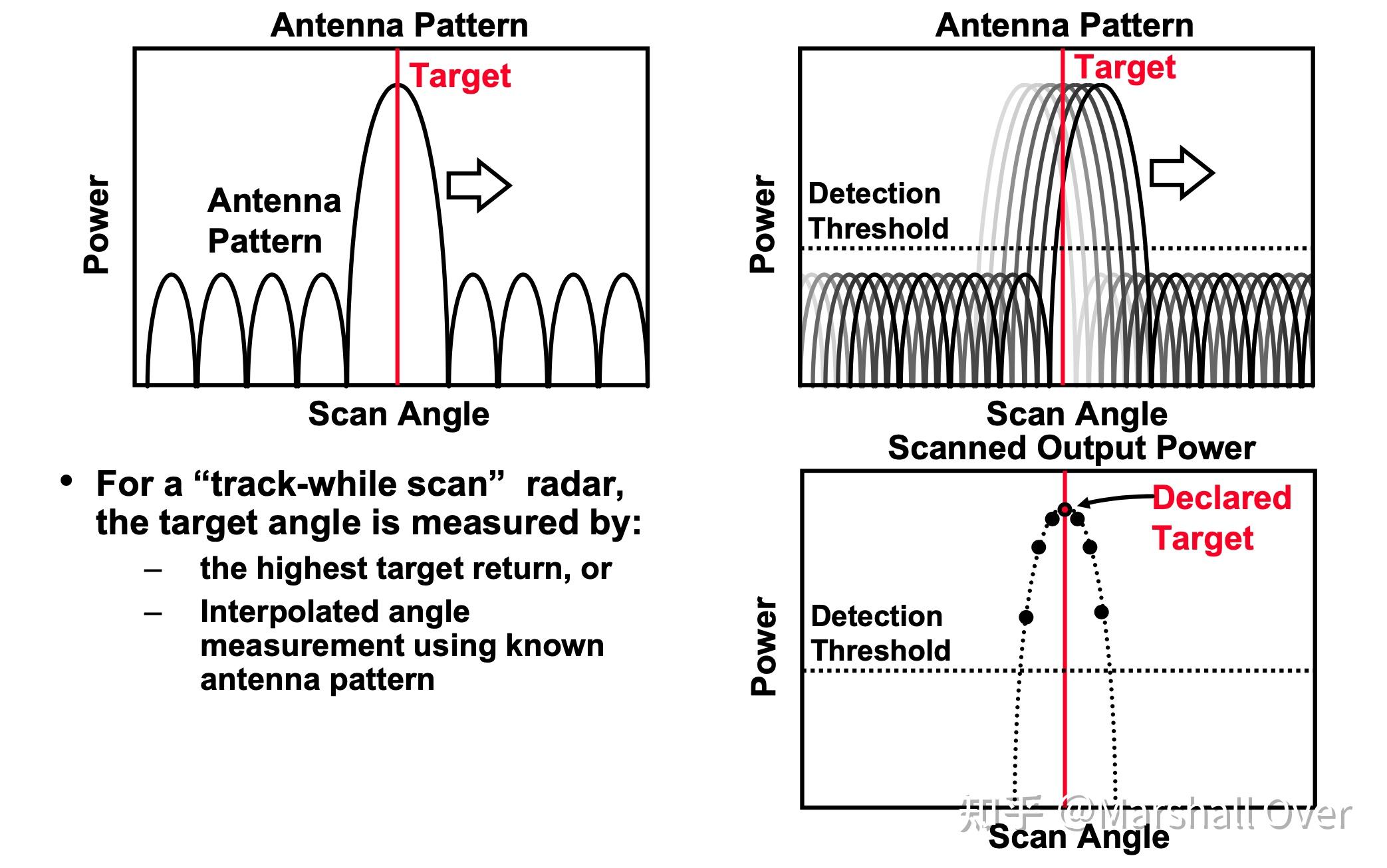
对于“边扫描边跟踪”雷达,目标角度通过以下方式测量:最大目标回波或使用已知天线方向图进行插值角度测量。

阵列天线的角度估计:相控阵雷达非常适合单脉冲跟踪。振幅比较单脉冲:辐射元件可以通过3种方式组合和、方位差和俯仰差模式。相位比较单脉冲:使用阵列的上半部分和下半部分作为仰角;使用阵列的右半部分和左半部分作为方位角。透镜阵列(例如MOTR)将使用振幅单脉冲:四端口馈电喇叭与碟形反射器相同。

单脉冲角度估计精度:在典型的检测阈值水平(~13dB)下,波束宽度可以是大约除以十倍;即10:1天线分束 (antenna beam splitting)。

Accuracy, Precision and Resolution:
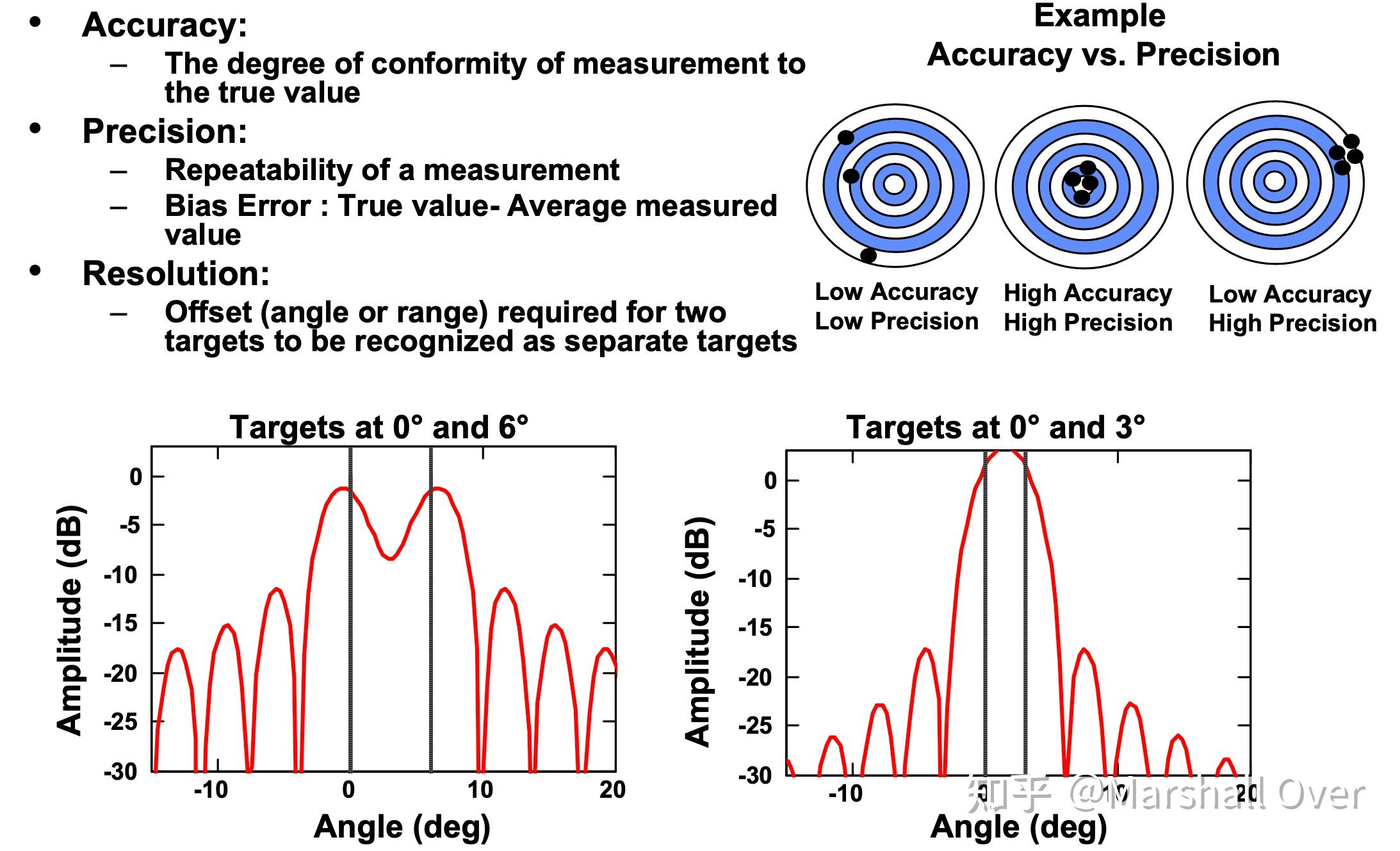
- 准确度:测量值与真实值的符合程度。
- 精度:测量的重复性;偏移误差:真值-测量均值。
- 分辨力:将两个目标识别为单独目标所需的偏移(角度或范围)。

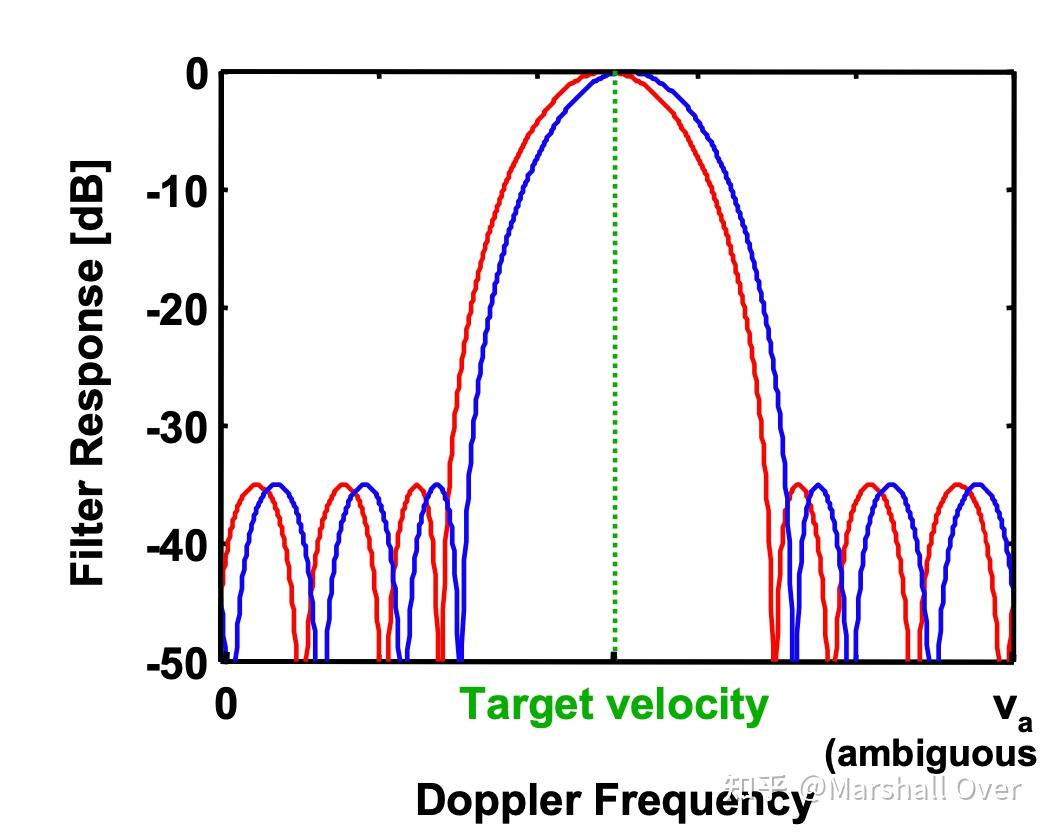
多普勒速度估计:使用两个与包含检测的多普勒滤波器的中心频率偏移的紧密间隔的频率滤波器;速度估计过程类似于角度和频率互换的角度估计;多普勒测量精度: \propto \frac{\lambda}{\Delta t} \cdot \frac{1}{\sqrt{SNR}},其中\Delta t 为相干积累时间。

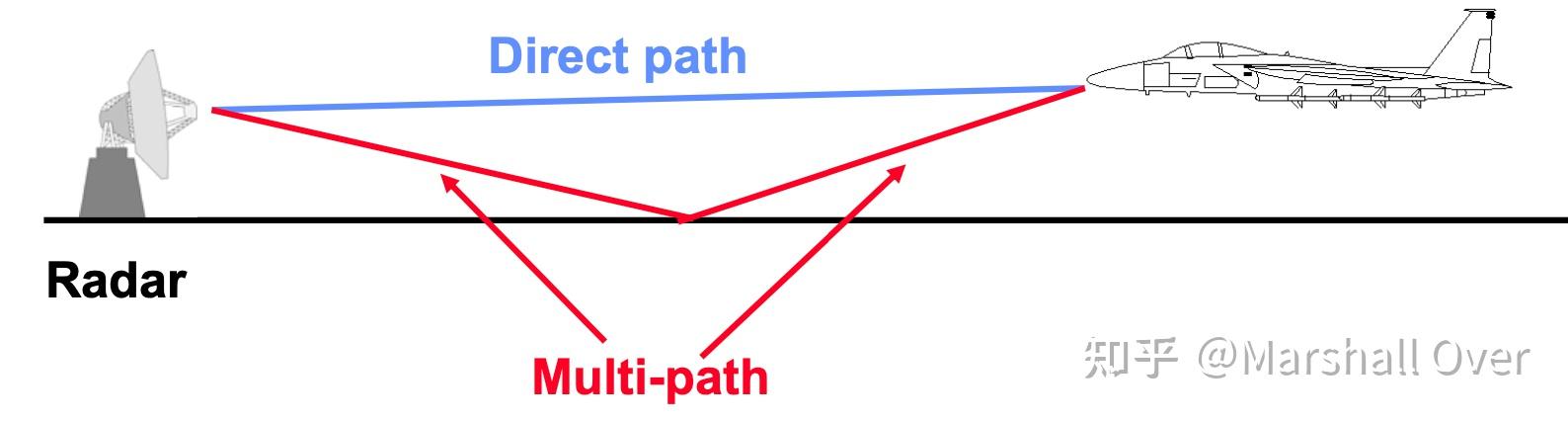
现实世界的局限性:接收器噪声:将方差添加到估计中;雷达校准:不良导致估计不良;振幅波动:对单脉冲和阵列的影响较小;角度噪声(角度闪烁或目标闪烁):复杂目标返回偏差角度估计;多路径(低角度跟踪):地球表面的反射与直接路径返回相结合;可能导致所有技术的角度估计存在偏差。

3 跟踪技术
跟踪:跟踪器每次扫描都会收到新的观测结果。目标测量和虚警。需要进行:启动新轨迹;更新现有轨迹;删除过时轨迹。

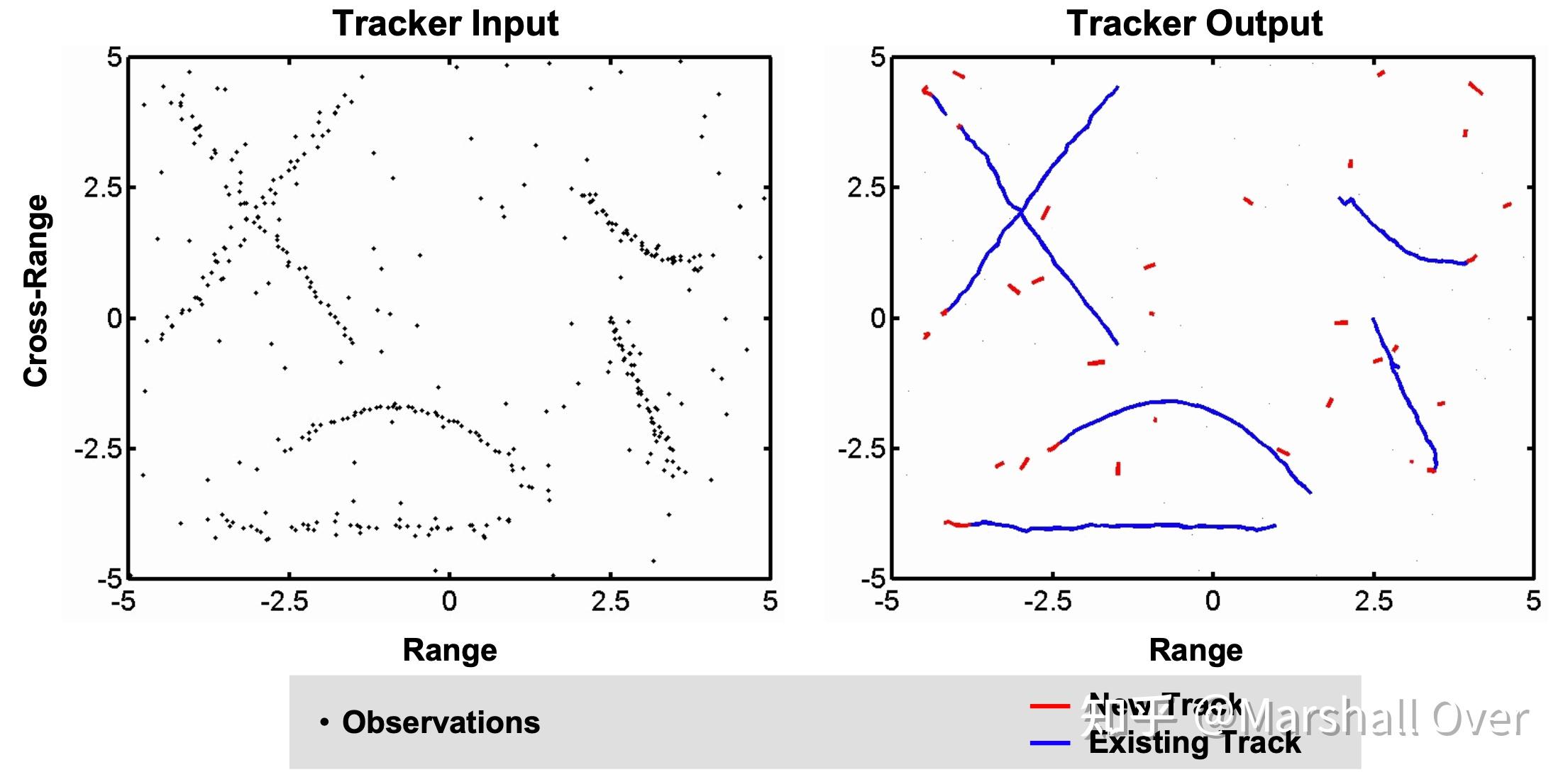
自动检测和跟踪技术:杂波抑制技术的发展和数字革命使这些防空和空中交通管制雷达系统的自动检测和跟踪技术得以成功发展。
目标检测:应用于每个距离、角度、多普勒的自适应阈值(CFAR);
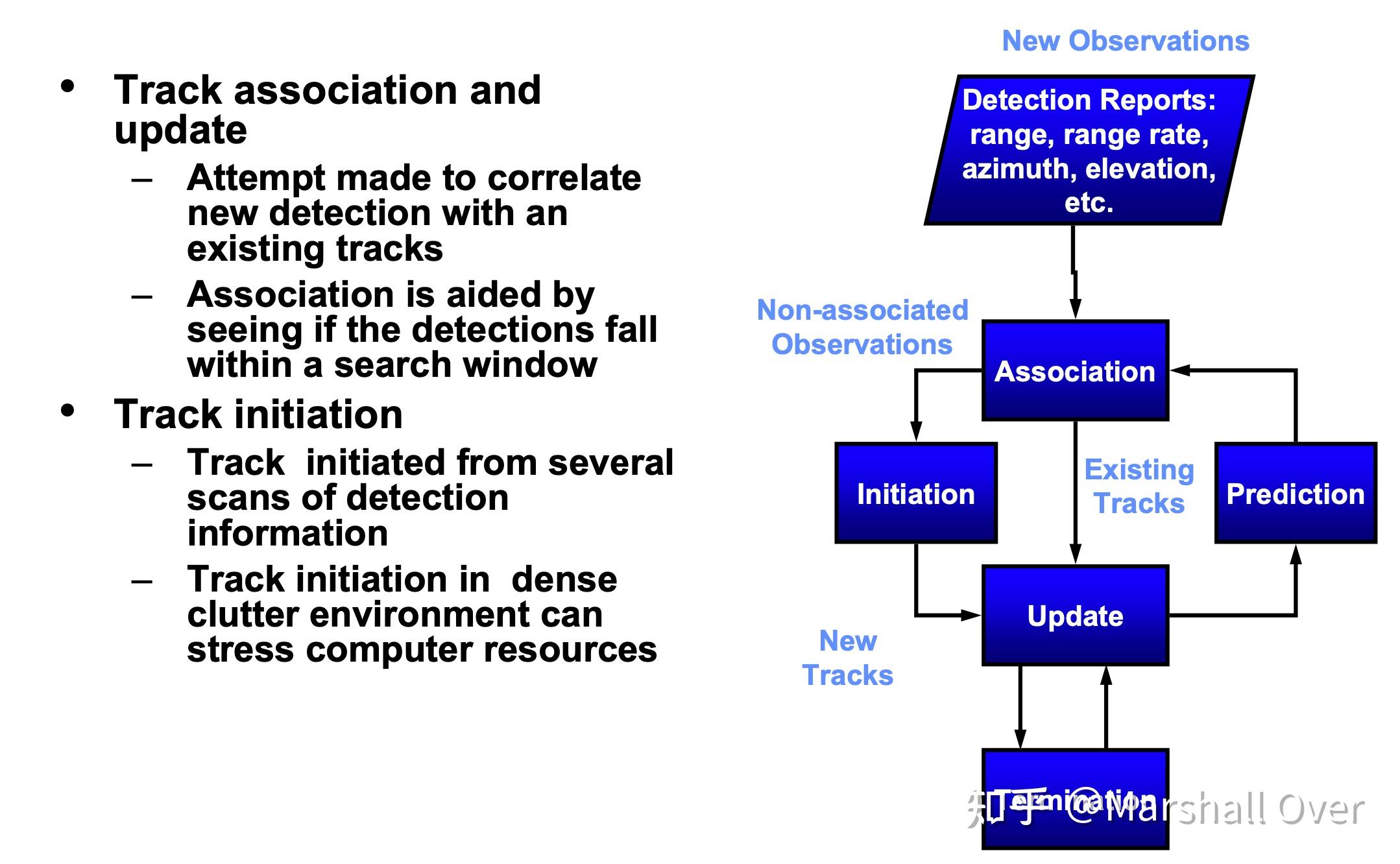
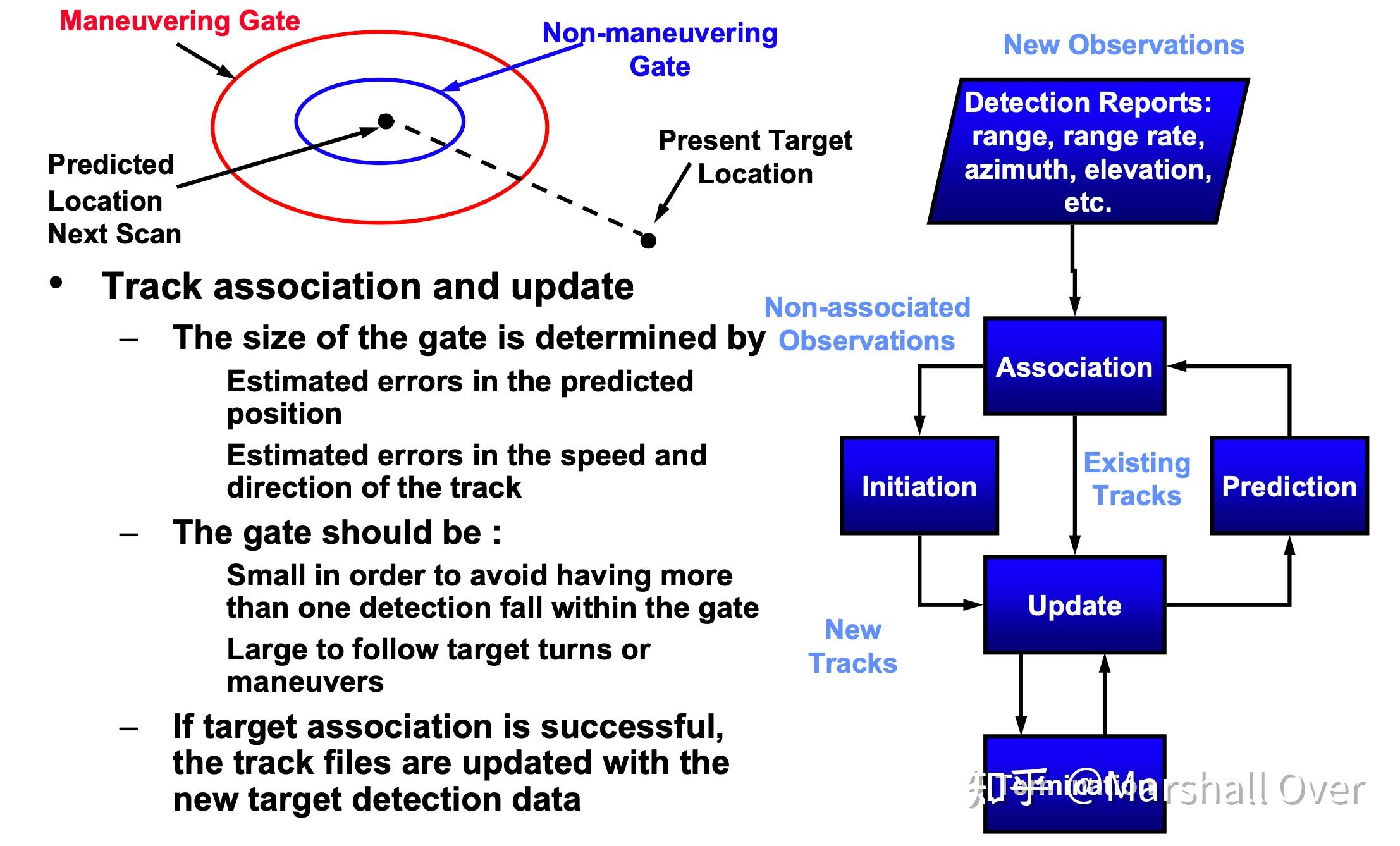
目标关联:相邻的(距离、角度和多普勒)阈值交叉是相关的;根据相关探测计算目标的距离、角度和多普勒。
跟踪任务:



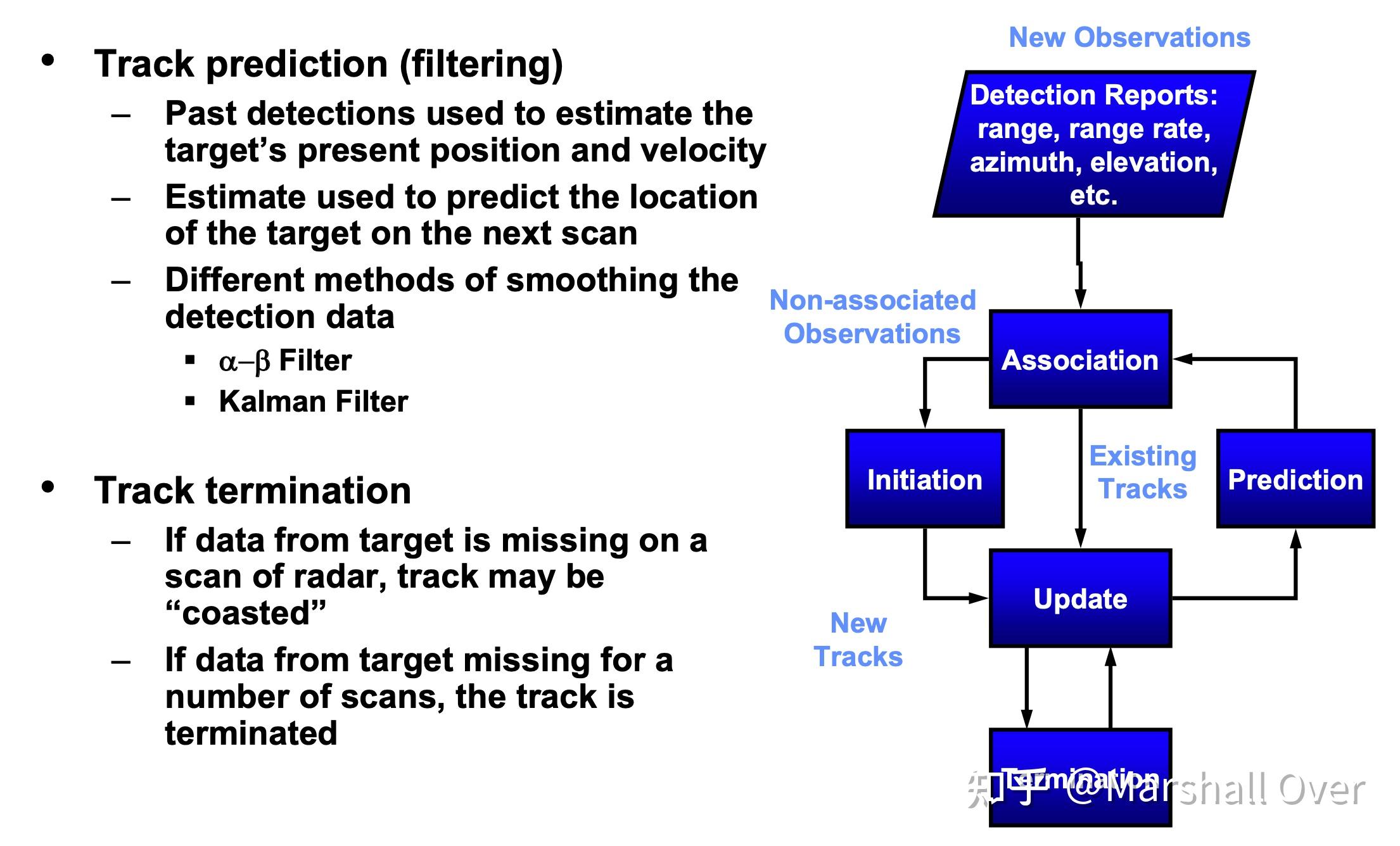
相控阵雷达跟踪:跟踪技术类似于刚才描述的自动检测和跟踪。相控阵的优势:轨道更新率高于机械扫描雷达天线;可以同时跟踪由多个波束宽度分隔的多个目标;没有闭环反馈控制雷达波束:计算机控制雷达波束和跟踪更新率。

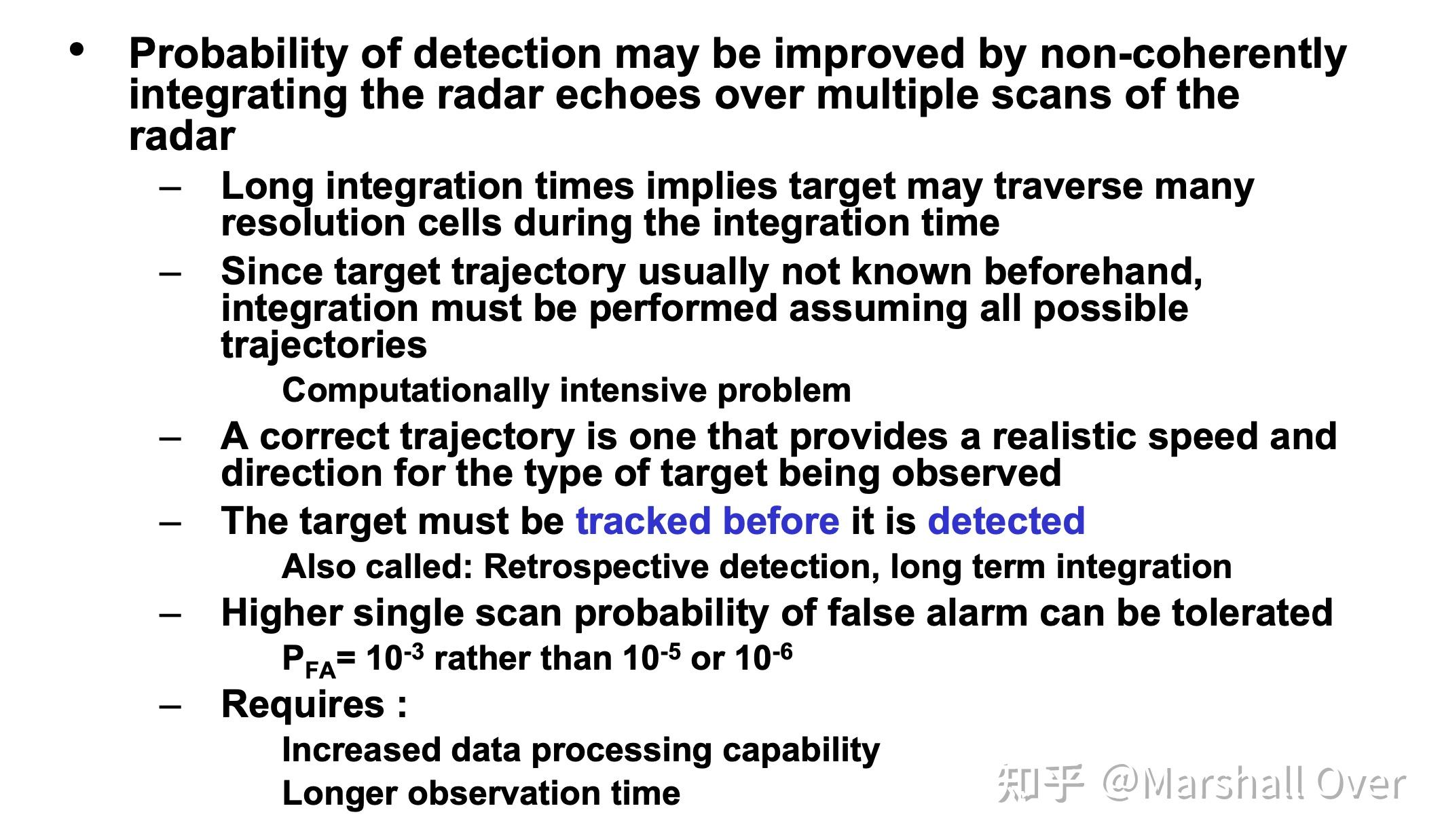
检测前跟踪技术:

4 总结讨论
参数估计技术使雷达能够获得精确的雷达测量值:距离、角度、多普勒等。单脉冲角度估计精度可以达到子波束宽度,会受到多个目标或干扰造成的限制。跟踪算法在预测目标轨迹和当前观测值之间找到最佳匹配。
5 参考文献
[1] 百度翻译
[2] MIT 公开课:Introduction to Radar Systems。