项目简介
本项目是基于esp8266实现的无线小车控制,核心的原理是通过js与esp8266进行websocket通信,前端页面模拟操作摇杆,生成操作数据,然后通过websocket通信将控制数据发送至esp8266,实现小车的无线控制
准备工作
硬件材料
用到的材料如下:
- esp8266开发板
- L9110电机驱动板
- 双马达小车
- 电脑 & 手机:有条件的话,
nginx跑前端页面更好 - 充电宝:主要是给开发板工单,如果有其他电源也可以,电流可以稍微高一点,不然驱动电机比较吃力,或者驱动板单独供电
接线
本项目的接线非常简单,你只需要连接好L9110的四根控制线即可,当然L9110的电源需要5v,小了驱动不了电机,节点线图我这里就不展示了,对应关系如下:
| 序号 | esp8266 | L9110 | 备注 |
|---|---|---|---|
| 1 | GPIO02 (D4) | IA | 连接电机的一端 |
| 2 | GPIO00 (D3) | IB | 连接电机的一端 |
| 3 | GPIO13 (D7) | IIA | 连接电机的一端 |
| 4 | GPIO12 (D6) | IIB | 连接电机的一端 |
电机的转向,可以根据实际测试结果调整接线
代码
esp8266
首先是esp8266的代码,这里我偷了个懒,直接复制oled屏幕的代码,而且后面考虑将屏幕集成到小车上,所以代码里面也没有删除:
#include <Arduino.h>
#include <ArduinoWebsockets.h>
#include <ESP8266WiFi.h>
#include <SPI.h>; // 加载SPI库
#include <Wire.h>; // 加载Wire库
#include <Adafruit_GFX.h>; // 加载Adafruit_GFX库
#include <Adafruit_SSD1306.h>; // 加载Adafruit_SSD1306库
#include <ArduinoJson.h>
// 定义 OLED屏幕的分辨率
Adafruit_SSD1306 display = Adafruit_SSD1306(128, 64, &Wire);
// WiFi parameters
const char* ssid = "wifi名称";
const char* password = "wifi密码";
String ip = "";
using namespace websockets;
WebsocketsServer server;
// L9110s驱动板A-1A引脚,GPIO02 (D4)
const int IA = 2;
// L9110s驱动板A-1B引脚,GPIO00 (D3)
const int IB = 0;
// L9110s驱动板A-2A引脚 GPIO13 (D7)
const int IIA = 13;
// L9110s驱动板A-12B引脚 GPIO12 (D6)
const int IIB = 12;
// 电机的转速,范围是0-255,本次只有一个电机,所以只关注x轴
byte speed_x = 255; // change this (0-255) to control the speed of the motor
byte speed_y = 255;
StaticJsonDocument<64> doc;
void setup() {
// 设置OLED的I2C地址
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
// 清空屏幕
display.clearDisplay();
// 设置字体大小
display.setTextSize(1);
// 设置字体颜色
display.setTextColor(SSD1306_WHITE);
// 设置开始显示文字的坐标
display.setCursor(0, 0);
// Connect to wifi
WiFi.begin(ssid, password);
// Wait some time to connect to wifi
for (int i = 0; i < 15 && WiFi.status() != WL_CONNECTED; i++) {
Serial.print(".");
delay(1000);
}
ip = WiFi.localIP().toString();
// 输出的字符
display.println("IP: " + ip);
// 输出的字符
display.println("webSocket Server");
// 使更改的显示生效
display.display();
// 创建websocket服务器
server.listen(80);
// 设置波特率
Serial.begin(9600);
}
void loop() {
auto client = server.accept();
if (client.available()) {
auto msg = client.readBlocking();
// return echo
client.send("Echo: " + msg.data());
// 序列化收到的消息
DeserializationError error = deserializeJson(doc, msg.data());
if (error) {
Serial.print(F("deserializeJson() failed: "));
Serial.println(error.f_str());
return;
}
// 移动的方向
String angle = doc["angle"]; // "up"
// 移动的距离
int distance = doc["distance"]; // 75
// close the connection
client.close();
String ipInfo = "IP: " + ip;
// 将ip信息输出到屏幕上
printText(ipInfo, 1);
printText("direction:" + angle + ", distance=" + distance, 2);
// 控制小车移动
carMove(angle, distance);
}
// 方向
delay(15);
}
// 向屏幕输出字符串
void printText(String text, int fontSize) {
Serial.print("text:");
Serial.println(text);
display.setTextSize(fontSize); // 设置字体大小
display.setTextColor(SSD1306_WHITE); // 设置字体颜色
display.println(text); // 输出的字符
// 使更改的显示生效
display.display();
}
/**
小车移动速度
*/
void carMove(String direction, int distance) {
speed_x = map(distance, 0, 75, 0, 255);
// 前进
if (direction.equals("up")) { // 前进
analogWrite(IA, 0);
analogWrite(IB, speed_x);
analogWrite(IIA, 0);
analogWrite(IIB, speed_x);
} else if (direction.equals("down")) { // 后退
analogWrite(IA, speed_x);
analogWrite(IB, 0);
analogWrite(IIA, speed_x);
analogWrite(IIB, 0);
} else if (direction.equals("right")) { // 向右
// 获取速度模拟值
analogWrite(IA, 0);
analogWrite(IB, 0);
analogWrite(IIA, 0);
analogWrite(IIB, speed_x);
} else if (direction.equals("left")) { // 向左
analogWrite(IA, 0);
analogWrite(IB, speed_x);
analogWrite(IIA, 0);
analogWrite(IIB, 0);
} else {
analogWrite(IA, 0);
analogWrite(IB, 0);
analogWrite(IIA, 0);
analogWrite(IIB, 0);
}
Serial.print("speed:");
Serial.println(speed_x, DEC);
}
记得修改wifi信息
控制端
这里的代码我就不展开讲了,只说核心的代码,如果没有任何前端基础,只是想控制小车的小伙伴,只需要将index.html中script中的ip和端口换成自己的即可:
ws = new WebSocket("ws://192.168.0.100:80");
192.168.0.100就是你的esp8266的ip,串口监视器会打印,端口代码默认写的是80,可以根据自己的需要调整。
有技术基础和条件的小伙伴可以把项目部署起来跑,没条件的小伙伴打开index.html也能操作,如果不知道如何使用nginx,大家可以试下这个轻量级的文件服务器webd,服务器本身只有94kb,还支持多生态,局域网传文件也很方便:

页面也很简洁:

需要注意的是,这个工具需要简单配置用户名和密码:
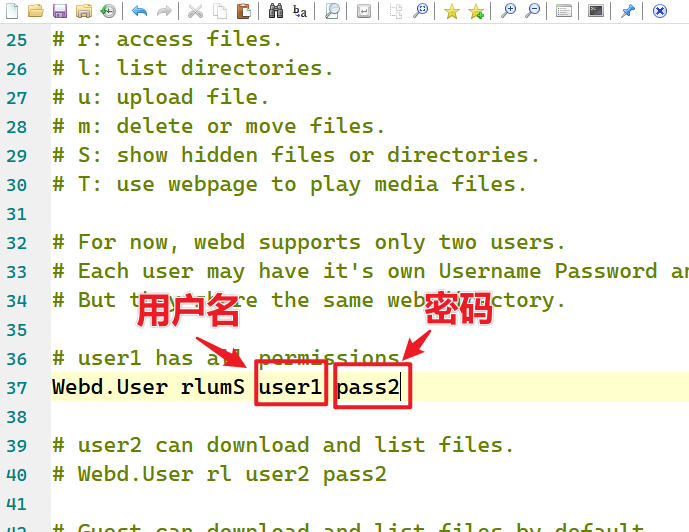
用户名前面的是权限,权限的描述配置文件里面有注释,感兴趣的小伙伴自己研究。需要说明的是,服务器默认端口是9212,所以我们的访问地址是电脑的ip加9212端口,之后输入我们的用户名和密码进行登录。
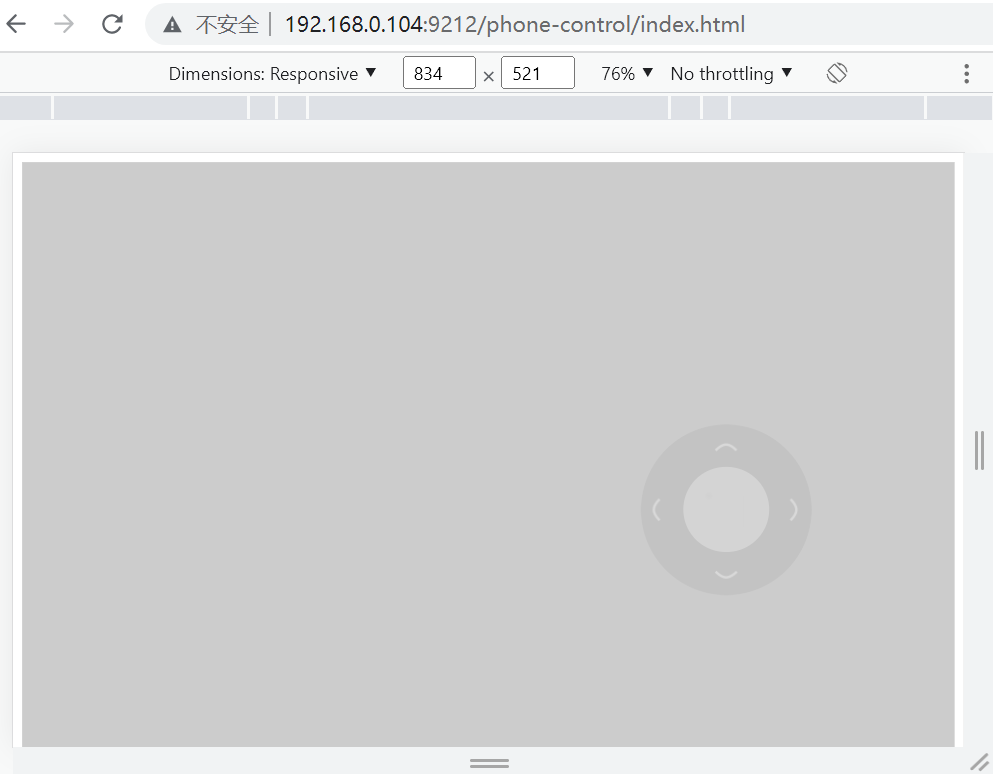
以win环境为例,下载之后解压,配置完之后,直接双击webd.exe双击运行即可,之后将我们的控制代码的文件夹phone-control拖到web目录下,之后通过浏览器访问就可以看到我们的页面,点击index.html进行访问即可:

至此,这个项目就算结束了,其实在完成这个简单的示例之后,我是有考虑更高效的webRTC通信的,奈何js层面需要nodejs加持,我觉得太复杂,最终放弃了,后面打算试下无线模块和esp32,性能应该会比esp8266好一点。
好了,今天的内容就到这里吧,感谢大家的支持,比心,有疑问可以评论区沟通哟