小车
基于STM32循迹避障蓝牙操作四驱小车(毕业设计)
———————智能车——————— 🎄外观 🎄模块介绍 🎈 -1- 测距模块 🎈 -2- 电机驱动模块 🎈 -3- 循迹模块 🎄功能介绍 🎈 超声波测距 🎈 黑线循迹 🎈 蓝牙控制 ———————实物咨询可私信——————— ......
图解小车自动往返电路,简单易学
一、主要零件如下: 二、图解小车自动往返电路设计如下: 图1,小车自动往返过程,按下启动按钮,比如右行按钮,小车开始向右行驶,到右端以后撞住限位SQ1,小车开始往左行驶,到左端以后撞住限位SQ2,小车又开始往右行走,一直循环运行下去,直到按下停止按钮,停车。 图2,为小车自动往返电路图。红色为带电部 ......
普冉PY32系列(十一) 基于PY32F002A的6+1通道遥控小车II - 控制篇
这篇继续介绍遥控小车的控制端, 除了电路部分的实物展示外, 分别介绍了遥控手柄的软件整体流程, 模拟量采集, 扩展IO输入采集和LCD展示. ......
普冉PY32系列(十二) 基于PY32F002A的6+1通道遥控小车III - 驱动篇
这篇继续介绍遥控小车的驱动端, 即电机驱动板, 分别介绍整体流程, 基于74HC595的IO扩展和麦克纳姆轮运动控制计算等. ......
普冉PY32系列(十) 基于PY32F002A的6+1通道遥控小车I - 综述篇
本篇介绍一个基于 PY32F002A 和 XL2400 的低成本无线遥控实现. 7通道是指6个模拟通道加一个开关通道, 模拟通道受PY32F002A的PIN脚限制, 全部用上可以做到8个, 因为我想保留SWD口, 所以只做了6个. 普通应用只需要双摇杆加两个双调节, 基本够用了. 第七个通道是一组开... ......
转载WIFI小车APP远程控制,无线智能小车之ESP8266例程
WIFI小车APP远程控制,无线智能小车之ESP8266例程 第一、原理讲解 原理简述:利用发布订阅模式,即:利用ESP8266 订阅了一个主题,再利用app inventor 编写的app 往这个主题发布消息,由于ESP8266 订阅了这个消息,所以就可以收到app发布得消息,从而执行相应得动作, ......
《安富莱嵌入式周报》第323期:NASA开源二代星球探索小车, Matlab2023b,蓝牙照明标准NLC, Xilinx发布电机套件,Clang V17发布
周报汇总地址:http://www.armbbs.cn/forum.php?mod=forumdisplay&fid=12&filter=typeid&typeid=104 视频版: https://www.bilibili.com/video/BV1vp4y1F7qD 1、开源的星球探索小车发布V ......
从零开始的32小车/diary/9.21
今上午起晚了,一百多个毕设就剩这一个了。 也算是为了应付毕设,开卷。 题目:机场智能行李车系统的设计与实现实现行李车定位、非特定人语音识别、循迹避障等,实现一款通过语音交互与乘客进行沟通的可以为机场乘客领路、陪伴乘客完成登机前准备工作的机场智能行李车。需要知识点:嵌入式、计算机网络、物联网技术 首先 ......
P1258 小车问题
就算不要求同时到达答案也是一样的,因为完全可以让先到的人少坐一点车。两人同时到达最省时间。 在某个时刻,可能是小车载着某个人在开,另一个人在走;也可能是两人都在走,小车在两人之间,去追在后面的那个人。两人走的路程和坐车的路程都分别相同。 其它情况肯定不优,而上面的方案可以把小车的折返全部搞到一起,如 ......
2020-12-21-两轮平衡小车探索
layout: post title: 两轮平衡小车探索 categories: 日志 tags: - 开发 - 开发任务 BGImage: 'https://github.xutongxin.me/https://raw.githubusercontent.com/xutongxin1/Pictu ......
树莓派小车-Tips1
目前树莓派小车文件结构: -usr | --Car | frp_0.20.0_linux_arm | --mjpg-streamer | mjpg-streamer-experimental 启动网络连接服务: 进入frp_0.20.0_linux_arm文件: cd Car/frp_0.20.0_ ......
基于机器视觉的小车轨迹控制软件界面展示
**项目概述:** 硬件:USB摄像头、51单片机、L298N驱动、ESP2866-WiFi模块、移动电源  软件: ......
ROS小车一些错误解决
sudo apt-get install ros-melodic-serial 18.04是melodic sudo apt-get install ros-melodic-uuid-msgs sudo apt-get install ros-melodic-bfl lslidar功能包的cmake ......
ROS小车STM32底板代码学习
用的是幻尔科技的新推出的ROS小车的STM32控制底板价格 他的代码是用HAL库写的,而且资料很少,刚开始连ROS1功能包都还在测试。 代码有300多M,编译一次,直接吃席。所以我用轮趣科技的ROS小车代码移植,采用的FreeRTOS写的,跟我学的代码风格几乎一致 移植过程中你会发现,电路很多地方都 ......
树莓派二驱动智能小车组装
*复现up主:杨坤树莓派爱好者基地的https://www.bilibili.com/video/BV1pW411J7WG?vd_source=7f1982c56a437c7b00c3695687b7086d 树莓派小车,稍微调整了一下连接的方式,做成后发现跟自己最终要实现的目标效果有很大的偏差,所 ......
二分-小车问题
小车问题 [toc] ## 题目描述 ・甲、乙两人同时从A地出发要尽快同时赶到B地。出发时A地有一辆小车,可是这辆小车除了驾驶员外只能带一人。 已知甲、乙两人的步行速度一样,且小于车的速度。问:怎样利用小车才能使两人尽快同时到达。 ・输入 ・仅一行,三个数据分别表示人AB两地的距离s,人的步行速度a ......
Mitsubishi 三菱FXPLC入门之自动小车控制程序
学而不思则罔,不管是学习任何知识,可以说“学以致用”才是学习的意义。“学以致用”就需要我们结合实际,把所学的知识发挥到最大的用处,而非纸上谈兵。PLC也是如此,作为自动化控制的一门技术,掌握PLC,就必须要把它运用到实际中解决各种问题。 学习三菱PLC也有一段时间了,在我以为自己终于筑基成功,可以参 ......
循迹小车笔记
# 循迹基础 两路、三路、四路、五路、八路循迹。 ## 两路循迹 [2路红外循迹小车,3种转向方式对比@B站.布丁橘长](https://www.bilibili.com/video/BV15A4y1o73o) 讲解了三种转向方式:(以左转为例) 1、左轮停止,右轮正转 2、左轮反转,右轮正转 3、 ......
智能小车
电动自行车 1.emqx订阅相关 1.1 存储信息 { "status":"ok", "data":[ { "id":1, "GPS":"(118.3E,44,6N)", "V":27.5, "I":10, "T":30, "speed":30 } ] } 单位分别为V,A, S, km/h 1.2 ......
教你10分钟完成智能小车的PID调速
简介 这是我在CSDN上面的第一篇博客,来分享一下我是如何用最短的时间进行智能小车的PID调速的。在疫情期间比较无聊,在某宝买了一个智能小车底盘和一堆零件,基于Arduino Due和树莓派进行开发,Due负责底层控制,树莓派进行上层控制器开发,比如斯坦利控制器或者模型预测控制器进行轨迹跟踪。 本次 ......
# Arduino小车PID调速——整定参数初试水
Arduino小车PID调速——整定参数初试水 在实现了小车较为可靠的测速基础上,便可以正式开展PID调速实验了。本文是基于使用Arduino平台上由Brett Beauregard大神写的PID库进行参数整定的,侧重于在对PID算法有基本了解下,通过实验自己动手整定参数,观察不同的参数值对小车调速 ......
ROS系列二:使用ROS控制虚拟小车
1.安装ubuntu及ROS 2.创建工作环境 mkdir gazebo_ws 在 gazebo_ws 文件夹下下载 gazebo_rviz_learn文件夹,将文件夹名称改为src . 拥有了src文件夹,就初步具备了工作环境 在 gazebo_ws 文件夹目录下打开终端 catkin_make ......
【平衡小车专栏】 4个月后,再做一辆平衡小车
今年3月做了一次平衡小车,不过是用面包板做的。写程序是用标准库写的,程序结构是前后台。 今年7月又做了一辆平衡小车,自己在jlc花电路板,设计结构。写程序是 HAL+CubeMX生成,程序是 FreeRTOS。 首先,电路板比面包板走线没那么乱了,以前用面包板走线,好几次走错吧,烧了两块芯片。 同时 ......
使用ROS控制小车
sudo apt-get install openssh* ssh -Y wheeltec@192.168.?.? 小车地址 先运行 roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch 开启机器人底层节点 再运行rviz,在r ......
构建我自己的平衡小车过程
1. 已经画好板子,预留了装电机的孔位,买好了电机和车轮子(闲鱼卖家送的),买好了电机座子。 电机的插座排线和固定电机的螺丝螺母还没买。 2. 准备用 FreeRTOS 来构建我的小车,正好CubeIMX可以搭载 FreeRTOS,那么一箭双雕,就用CubeIMX来编程吧。 首先需要了解的是:自己的 ......
esp8266无线小车
## 项目简介 本项目是基于`esp8266`实现的无线小车控制,核心的原理是通过`js`与`esp8266`进行`websocket`通信,前端页面模拟操作摇杆,生成操作数据,然后通过`websocket`通信将控制数据发送至`esp8266`,实现小车的无线控制 ### 准备工作 #### 硬件 ......
小车PID巡线调节
# PID巡线调节 ## 1、双巡线P控制 #### KP可以先从0.2值调起,P比例主要控制小车能够在线上正常巡线, **P比例说明:KP值越小,转弯幅度越大,会直接越过黑线。KP值越大,转弯幅度越小,能正常巡线,但是摆动很平凡。** 误差=右巡线-左巡线 两个模拟巡线之间的误差值 p修正值=误差 ......
【实验】树莓派小车
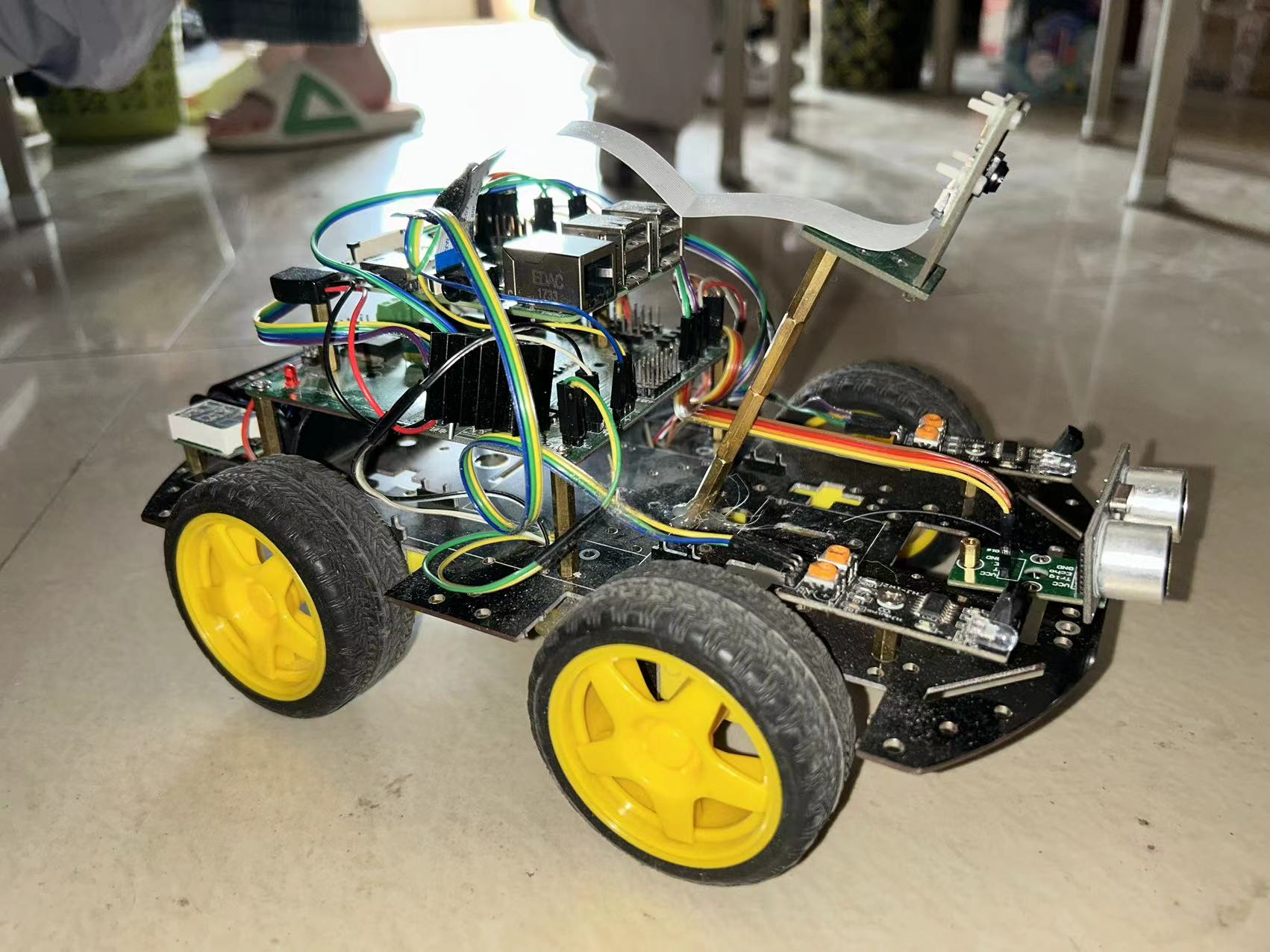 # 树莓派小车实验报告 # 1 小车构造及环境配置 ## 1.1 ......
小车
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universedeb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ ......