二维几何变换,分2部分:
计算机图形:二维几何变换(1)
计算机图形:二维几何变换(2) 审核中
平移、旋转、缩放这些属于基本变换,还有一些特殊二维变换如反射、错切。本文讲特殊二维变换。
特殊二维变换
反射
产生对象镜像的变换,称为反射(reflection)。
反射镜像如何得到?
通过将对象绕反射轴旋转180°。反射轴(axis of reflection)可以是xy平面内一条直线,或垂直于xy平面的一条直线。
当反射轴在xy平面内时,绕该轴旋转的路径在垂直于xy平面的平面中;
当反射轴⊥xy平面时,旋转路径在xy平面内。
特殊情况:
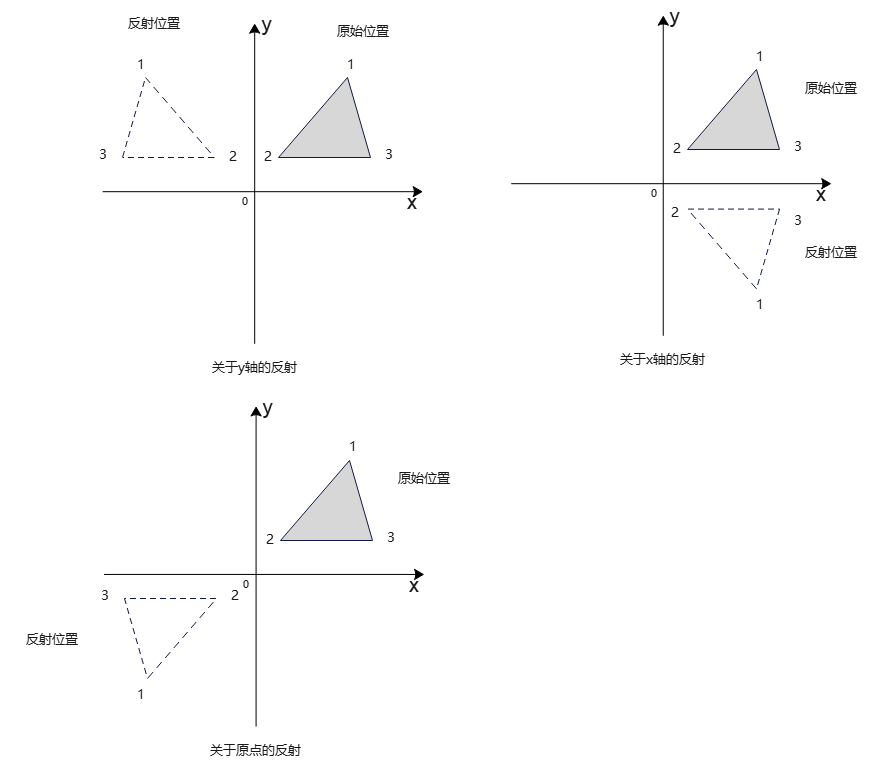
- 反射轴是x轴,即直线y=0
x值保持不变,y值为原来反号。于是,反射变换矩阵:
- 反射轴是y轴,即直线x=0
y值保持不变,x值为原来反号。于是,反射矩阵:
- 同时翻转x、y坐标,即相对于原点的反射
反射矩阵:
相当于θ=180°的旋转矩阵R(θ),即将xy平面内的对象绕原点旋转180°。
关于y轴、x轴、原点反射示意图:
- 反射轴为直线y=x
反射矩阵:
两种方法:
Ⅰ 根据y=x对称性
任一点(x,y)关于y=x对称点为(y,x),于是
可得变换矩阵。
Ⅱ 复合变换
分三步:
①将直线y=x顺时针旋转45°(θ=45°),到x轴上,变换矩阵R(-θ);
②按x轴反射,变换矩阵\(R_{y=0}\)(式(1));
③逆时针旋转45°,将直线y=x旋转回原始位置,变换矩阵R(θ)。
复合变换矩阵:
- 关于任意直线y=mx+b的反射
可以用平移-旋转-反射的复合变换来完成:
先平移到经过原点,再旋转到x轴,进行x轴反射,最后逆旋转、逆平移回原位置。
错切
错切(shear)是一种使对象形状发生变化的变换,经过错切的对象好像是由已经相互滑动的内部夹层组成。
2种常用错切:
1)移动x坐标值的错切;
2)移动y坐标值的错切。
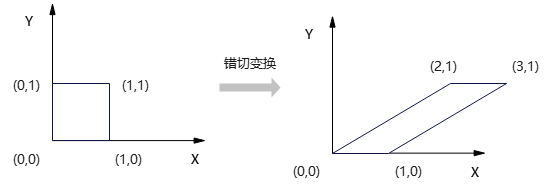
- 相对于x轴的x方向错切
变换矩阵:
对应坐标变换:
\(sh_x\)可以是任意实数。
例,\(sh_x=2\),正方形错切变换成平行四边形,如下图:
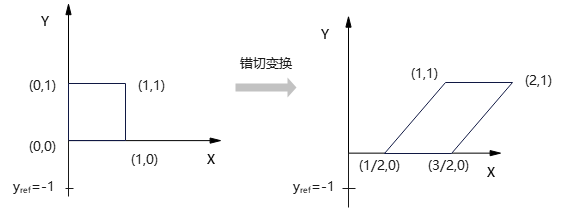
- 相对于其他参考线的x方向错切
错切矩阵:
对应坐标变换:
例,错切参数\(sh_x={1\over 2}\)、相对于直线\(y_{ref}=-1\)的错切:
- 相当于\(x=x_{ref}\)的y方向错切
错切矩阵:
对应坐标变换:
小结
错切能将正方形变换成梯形,这在后面的透视投影的斜透视投影棱台中会有应用。