安装ROS2
使用鱼香ROS的一键安装:
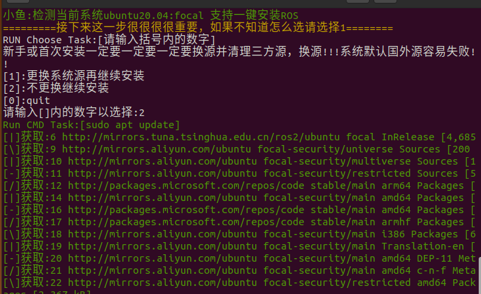
wget http://fishros.com/install -O fishros && bash fishros

进行换源操作,这里已经换过源了
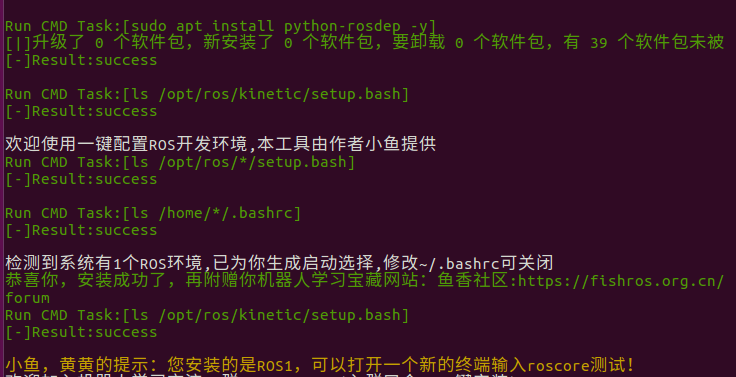
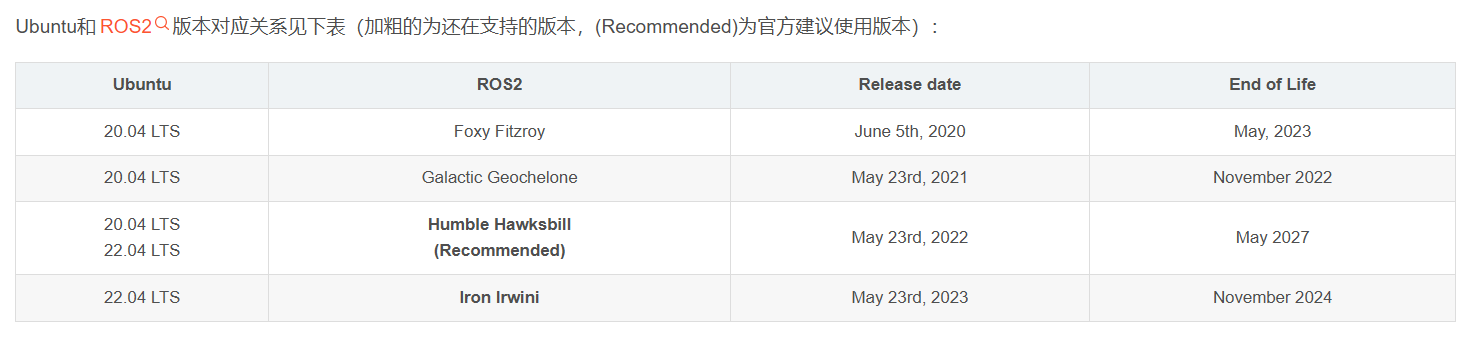
选择安装版本对应的,这里已经提前安装好了

安装ROS2之后,打开小乌龟代码: (安装的ros1需要另测)
ros2 run turtlesim turtlesim_node
终端出现小乌龟后,再打开一个新的终端,在里面键盘控制的节点:
ros2 run turtlesim turtle_teleop_key
正如打印信息所述,可以通过键盘上的方向箭头移动小乌龟,可以通过G|B|V|C|D|E|R|T这些按键进行旋转到一个绝对的方向,F取消旋转,Q退出。