摘要
小巧轻量的MEMS惯性传感器最*在性能上的提升,使得惯性技术可以应用到诸如人体运动捕获这样的领域。这使得对惯性导航的研究兴趣被激发,然而目前对这个主题的导论都没有充分讲清楚惯性系统的误差特性(error characteristic)。
引言
这是一篇剑桥大学Oliver J. Woodman写的技术报告,对惯性导航的一些基本知识进行了介绍。主要包括惯性导航的两种类型(Stable Platform System稳定*台和Strapdown System捷联惯导)、IMU的两个主要元件--陀螺仪和加速度计的工作原理和误差特性,以及不同误差源对捷联式导航的影响,另外就是介绍了Allan Variance,可以用来分析IMU实际的误差特性。也用实际的例子和仿真探究验证不同维度误差的影响。最后介绍了一种降低漂移误差的方法。
2 惯性导航
惯性导航是一种自洽的(self-contained)导航技术,其利用加速度计和陀螺仪的测量来跟踪物体的位置和朝向相对于一个已知的起点、朝向和速度。IMU一般包含三个正交的速率陀螺(rate-gyroscope)和三个正交的加速度计,分别测量角速度和线性加速度。通过处理这些设备的信号就可以跟踪一个设备的位置和朝向。
2.1 惯性系统的配置
几乎所有的IMU都可以分为下列的两类。这两类的差别在于陀螺仪和加速度计运行在哪一个参考系。本文全文将导航系统的参考系称为body系,将用于导航的那个系称为global系。如下图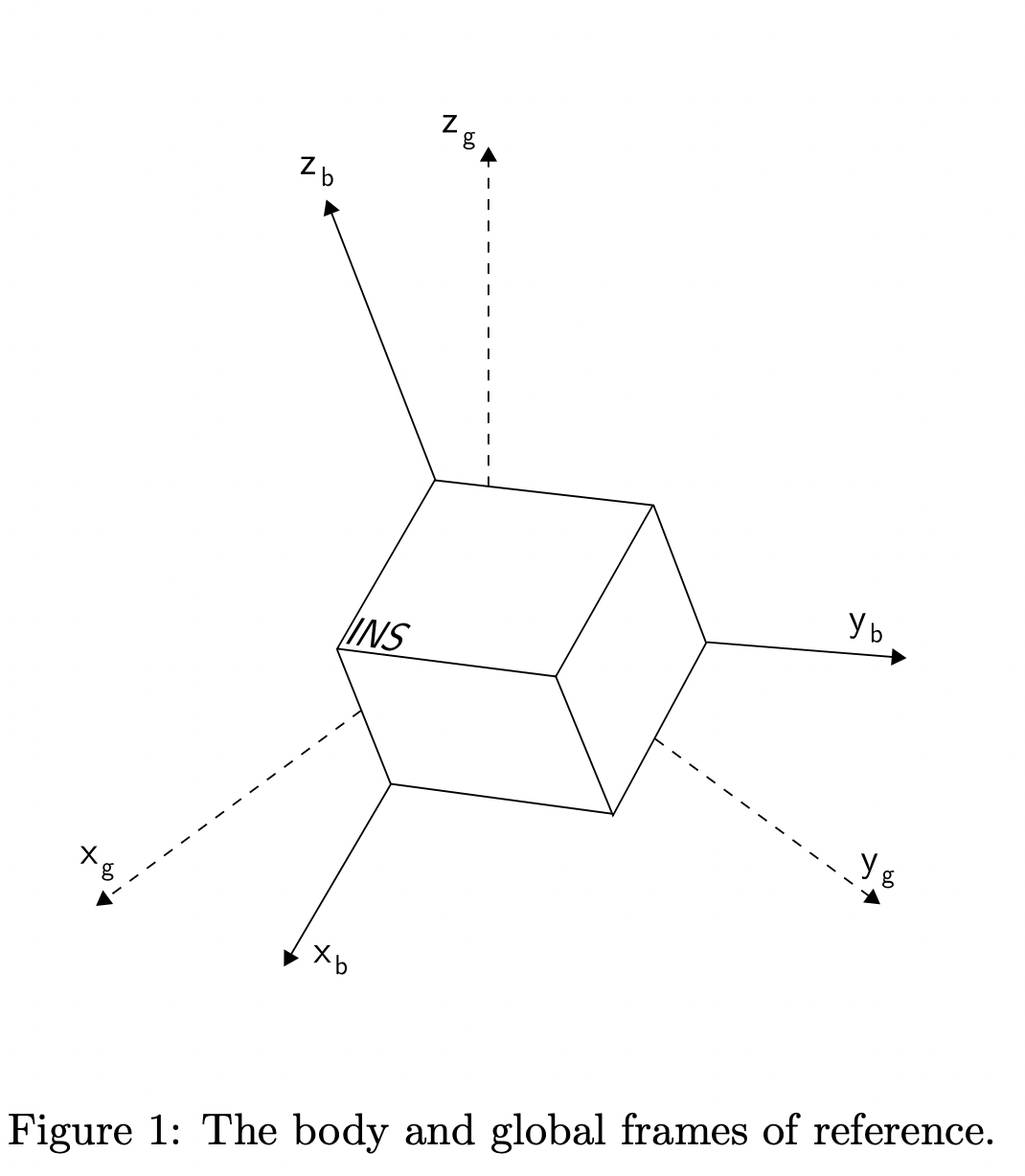
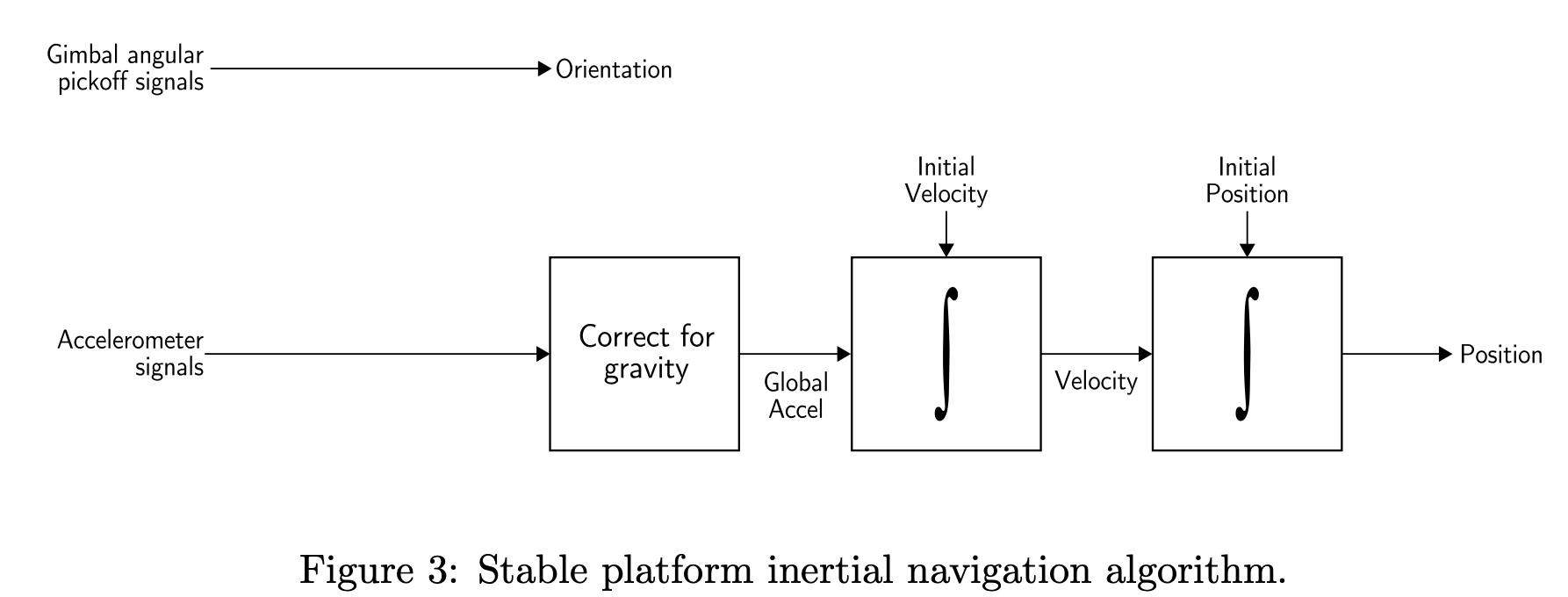
2.1.1 稳定*台系统
设备*台与global系保持对齐,就是手持云台相机那种(公鸡头稳定器、倒立摆)
这种系统的的惯性导航算法如下图:
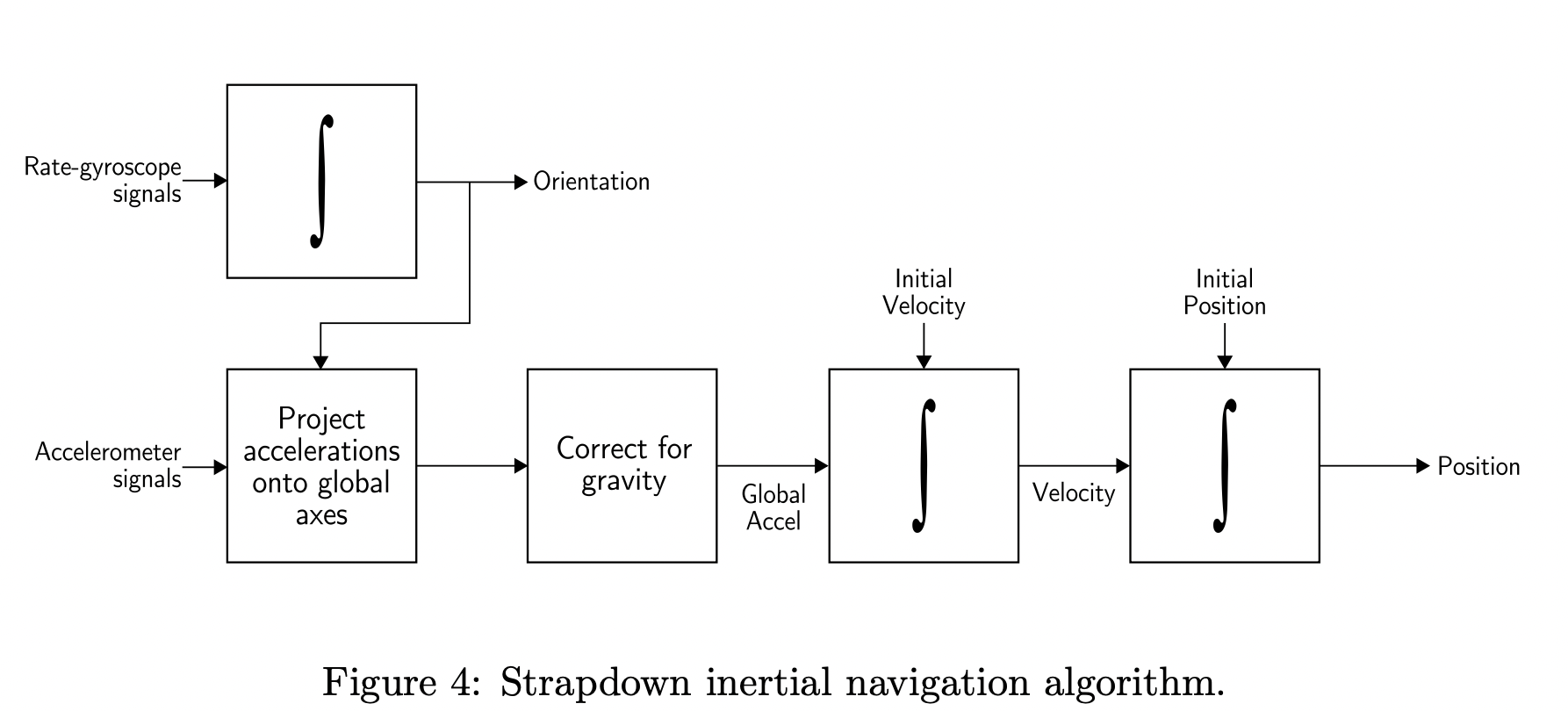
2.1.2 捷联式系统
惯性传感器刚性连接到设备上,输出的是body系的测量量而不是global系。
这种系统的惯性导航算法如下图:
3 陀螺仪
3.1 陀螺仪类型
陀螺仪类型和工作原理介绍,这个就大致记录一下,主要介绍了3种--机械陀螺、光陀螺和MEMS。机械陀螺是利用角动量相关原理,即旋转的轮子会对抗方向改变。光纤或者激光陀螺就是利用光的传播路程不同引发的干涉来计算转速。MEMS是利用科里奥利效应。相比其他类型,MEMS有很多优点,比如轻、便宜、容易制造等等,缺点就是目前精度还不高。
3.2 MEMS陀螺的误差特性
这一节主要讲MEMS陀螺中的误差,以及它们在信号积分过程中的影响。
3.2.1 常量Bias
陀螺仪的bias就是当它没有承受任何旋转的时候输出的测量值的*均值(也就是输出相对真值的偏移量(offset)),单位为度每小时。在积分的过程中,一个\(\epsilon\)大小的常量bias将造成随时间线型增长的角度误差:$\theta(t)=\epsilon * t $
陀螺仪的常量误差可以通过对长时间没有承受旋转的陀螺输出进行*均来估计。一旦这个bias已知,对它进行补偿只需要将其从陀螺仪的输出中减掉就行。
3.2.2 热力机械白噪声 / 角度随机游走
MEMS陀螺的输出会受某种热力机械噪声扰动,这种噪声摆动的频率远大于传感器的采样频率。这将导致从传感器获取的样本值受到一个白噪声序列(一个零均值互不相关随机变量序列)的扰动。这种情况下,每一个随机变量都是同等分布的并且有一个有限的方差 \(\sigma^2\).
为了弄清楚这个噪声在积分信号时的影响,我们可以假设采用矩形规则来执行积分做一个简单的分析。推导可以看原文,结论就是这个噪声会引入一个零均值随机游走误差到积分后的信号中,该信号的标准差为
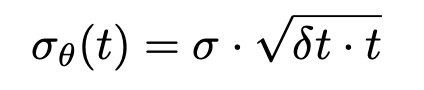
与时间的*方根成比例增加。角度随机游走(angle random walk ARW)定义为
3.2.3 Flicker Noise / Bias Stability
由于电子中的flicker噪声以及其他器件容易收到随机flickering,MEMS陀螺仪的bias随着时间不断游走。flicker噪声是一种具有1/f spectrum(谱?)的噪声,他的影响通常在电子元器件的at low frequencies(处于低频时?)观察到。由flicker噪声造成的bias摆动通常建模为随机游走。
bias stability measurement描述了设备的bias随着一个特定的时间周期如何改变,典型值100秒,在固定条件下。对于bias stability通常指定为1 sigma的值,单位为度每小时(或者度每秒对于低精度设备)。在随机游走建模下,bias stability可以解释如下:假设B_t是t时刻的已知bias,那么一个0.01度每小时的1 sigma值在100秒的周期意味着(t+100)时刻的bias是一个期望值为B_t,标准差为0.01度每小时的随机变量。这个性质导致了陀螺bias随时间变化的随机游走,这个随机游走的标准差随时间的*方根成比例增长。因此bias stability通常指定为了一个bias随机游走观测
其中t为bias stability定义的时间跨度。
通常我们感兴趣这个误差如何影响通过积分陀螺仪信号得到的朝向。如果我们假定bias随机游走模型,那么积分这个bias摆动的结果是一个角度上的二阶随机游走(一阶随机游走的积分)。现实中bias浮动实际上不是随机游走。实际上它被约束在一定范围内,因此随机游走模型只是一个真实过程短时间内的良好*似。
3.2.4 温度影响
由于环境改变和传感器本身发热导致的温度变化引发了bias的变化。注意这样的变化不包含于发生在固定条件下的bias stability测量。
任何由于温度变化引入的残留bias都会引起一个随时间线形增加的方向误差,跟3.2.1节描述的一样。对于MEMS传感器bias与温度之间通常是高度的非线性关系。大部分IMU包含一个内部温度传感器使得矫正温度导致的bias成为可能。一些IMU执行内部矫正。
3.2.5 标定误差
“标定误差”的术语指代一系列误差包括尺度因子scale factor、对齐alignment、线性化li nearities。这样的误差只有在设备转动的时候才产生bias误差。这样的误差导致积分信号时额外的漂移,漂移量与转动速率和时长成正比。测量和矫正标定误差是可能的,有些IMU执行内部矫正。
3.2.6 总结
本章罗列的主要的误差源汇总在下表。每个误差源的相对重要性随不同的陀螺仪而不同。对于MEMS陀螺仪,角度随机游走误差和未矫正的温漂或者初始估计不准导致的bias误差通常是最主要的误差来源。角度随机游走可以作为通过积分陀螺仪信号得到的方向的一个不确定度下界。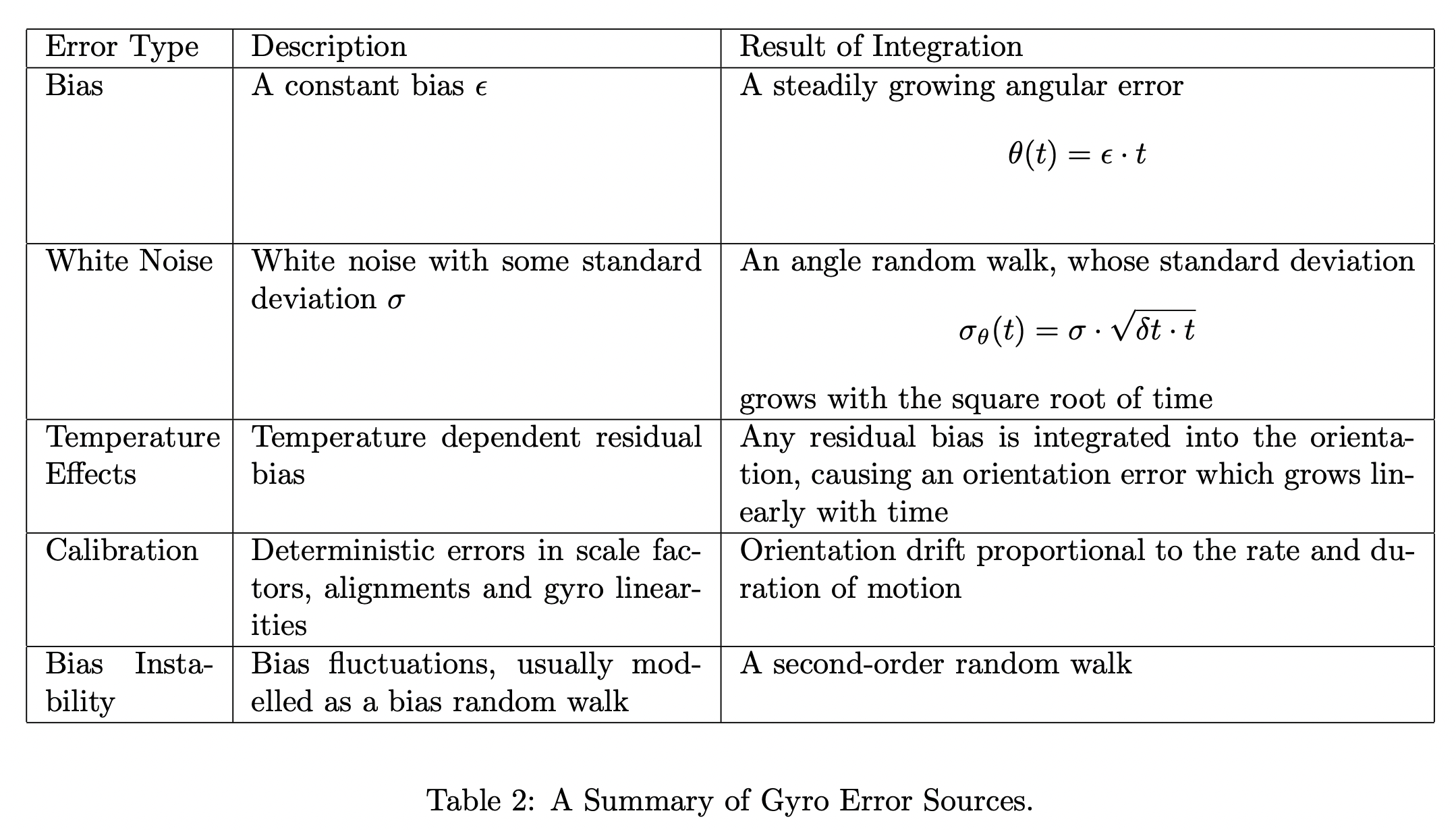
4 线性加速度计
** 4.1 加速度计的类型**
加速度计大致分为机械的或者固态的。
略过。基于原理:牛顿第二定律等等
4.2 MEMS 加速度计误差特性
本节讲了出现在MEMS加速度计上面的误差。误差类型类似3.2节陀螺仪的那些,因此简要描述。加速度计中的误差的一个重要差异是它们会经过两次积分来跟踪位置,而速率陀螺信号只积分一次来跟踪朝向。
4.2.1 常量bias
加速度计的bias是它的输出与真值之间的偏移,单位m/s^2。在经过双重积分后,一个\(\epsilon\)大小的常量bias会造成位置误差随时间*方级增长。位置上积累的误差为 \(s(t) = \epsilon * t^2 / 2\) 其中t为积分时间。
通过测量加速度计在不承受加速度时的输出的*均值可以估计这个bias。然而重力让这个事变复杂了,因为重力在加速度计上面的分量将以bias的形式出现。因此为了测量bias需要知道精确的设备相对于引力场的朝向。实际上这个可以通过标定工作来实现,通过把设备安装在一个可旋转的,其方向可以被精确控制的*台上。
4.2.2 热力机械白噪声 / 速度随机游走
跟陀螺仪一样的原因,结论是加速度计的白噪声会造成位置估计有个二阶随机游走--均值为0,标准差与时间的3/2次方成正比。
4.2.3 Flicker噪声 / Bias stability
跟陀螺仪一样,建模为一个bias的随机游走。基于这个模型,这种噪声产生一个速度的二阶随机游走,导致速度的不确定度随时间的3/2次方成比例增长,并产生一个位置的三阶随机游走随时间的5/2次方成比例增长。
4.2.4 温漂
跟陀螺仪一样。
4.2.5 标定误差
标定误差(尺度系数、对齐、输出线性化)只有在设备承受加速度时才以bias误差的方式出现。注意由于重力加速度,这些短期的bias误差即使在静止的时候也能观测到。
4.2.6 总结
MEMS加速度计的主要误差源跟陀螺仪差不多。下表总结了这节出现的误差源。对于MEMS设备,角度随机游走和未矫正的bias误差是典型的误差源,限制了设备的性能。然而每个误差源的相对重要性取决于用到的设备。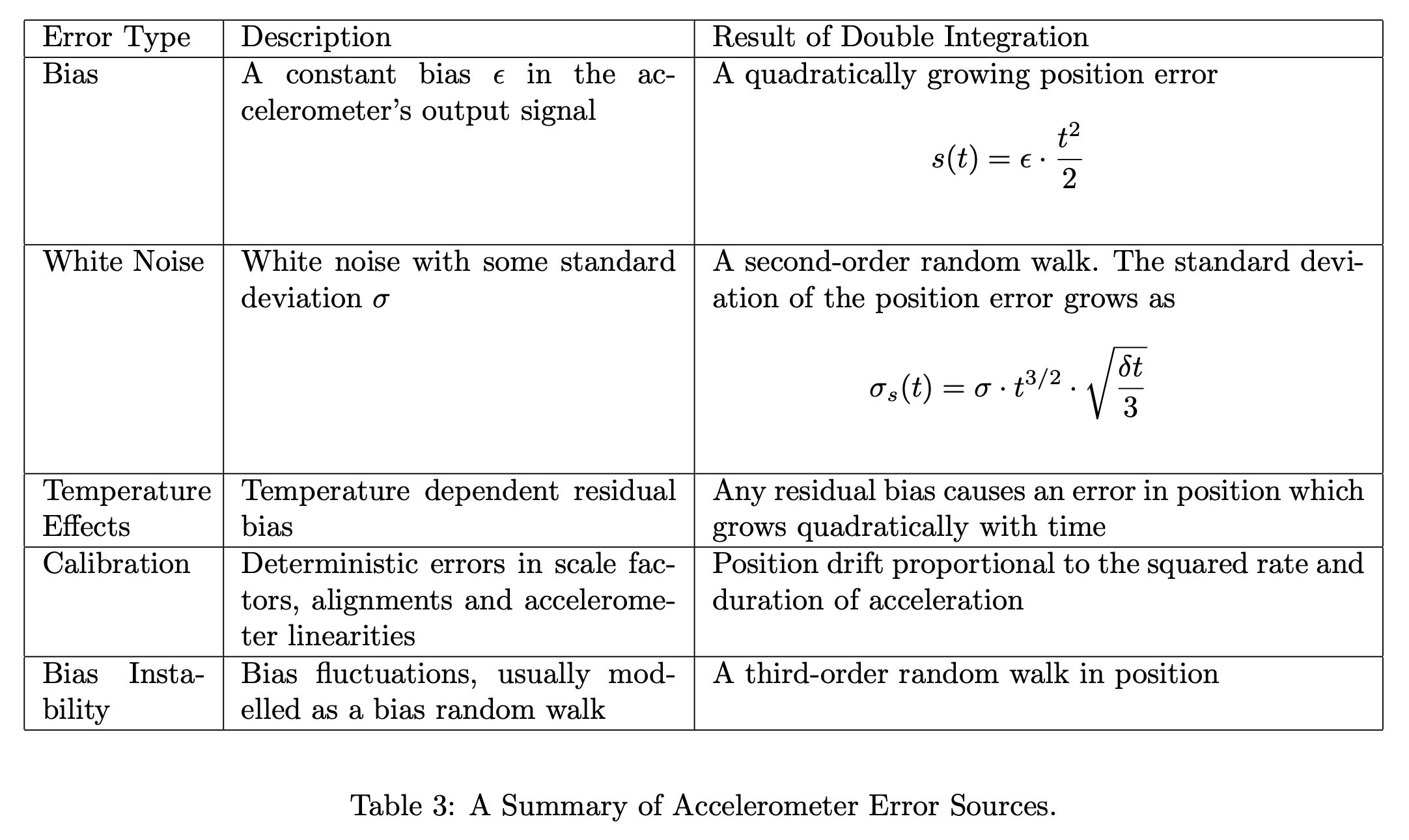
5 信号噪声分析
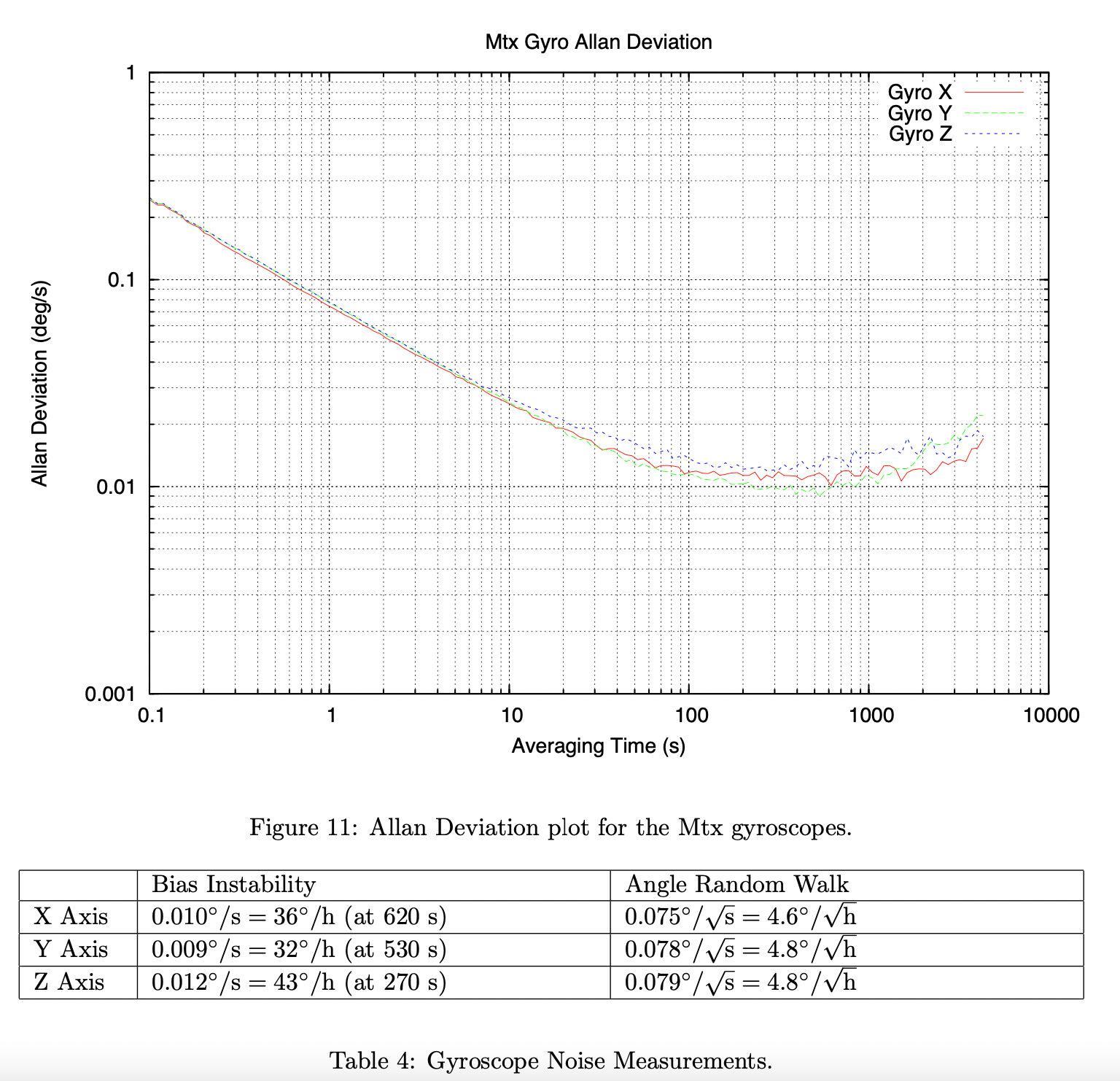
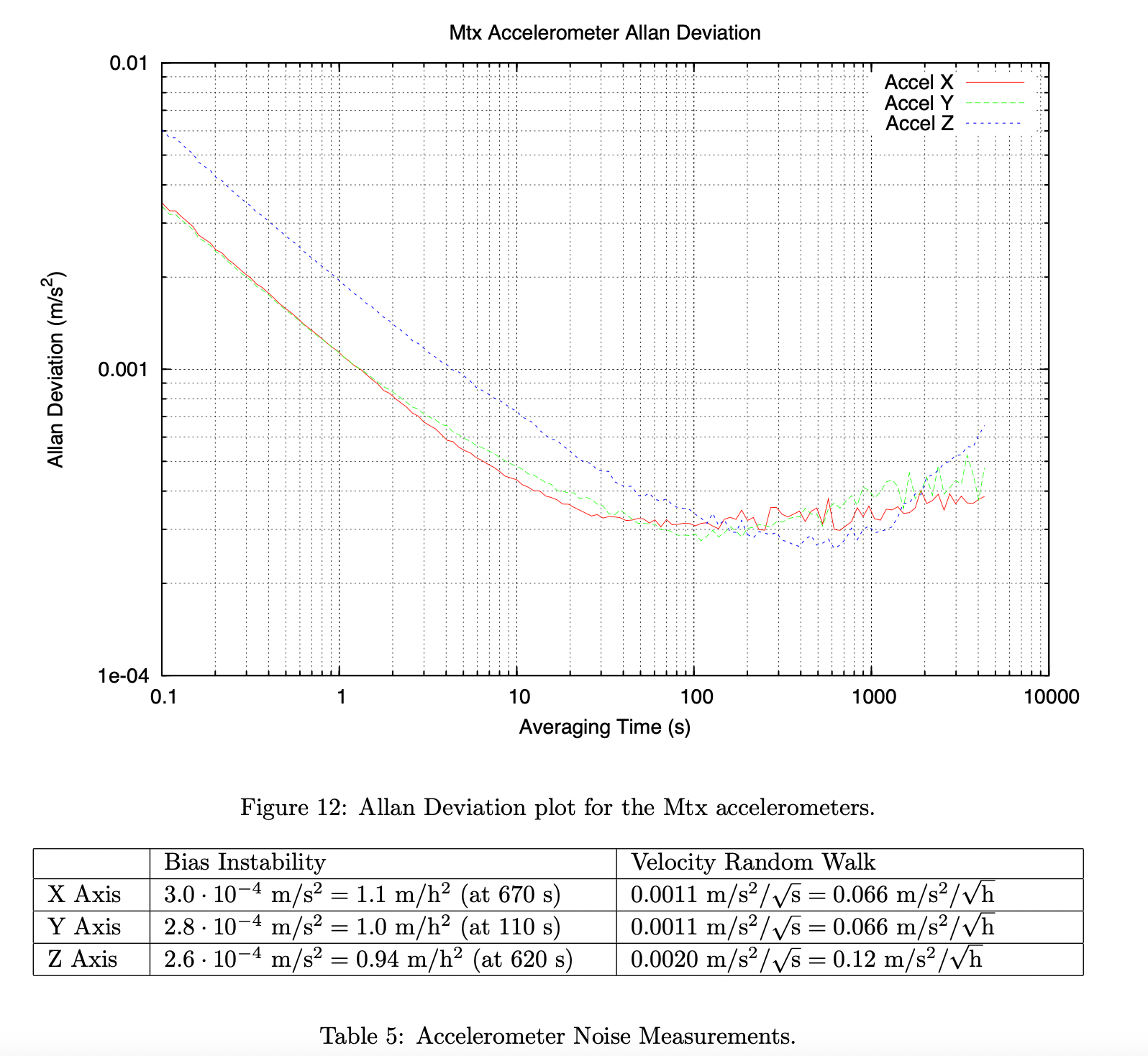
本节介绍叫做“Allan Variance”的技术,可以用于检测和确定上述噪声过程的特性。并应用该技术对Xsens Mtx设备的加速度计和陀螺仪信号进行了分析。
5.1 Allan Variance
艾伦方差是一种时域分析技术,它原本为时钟系统中的特征噪声和稳定性而设计。该技术可以应用于任何信号以确定噪声过程的潜在特征。信号的艾伦方差是一个对*均时间的函数(averaging time)。对于*均时间t,艾伦方差按照以下方法计算:
- 取一个长的数据序列并划分成长度为t的小块。数据必须足够划分成至少9个小块
- 对每个小块中的数据进行*均,得到一串*均值(a(t)1, a(t)2, ..., a(t)n) 其中n是小块的数量
- 艾伦方差按下式计算

为了确定潜在的噪声过程特性,Allan Deviation

按照log-log尺度打印为一个t的函数。不同类型的随机过程导致曲线中出现不同梯度的斜率,如下图
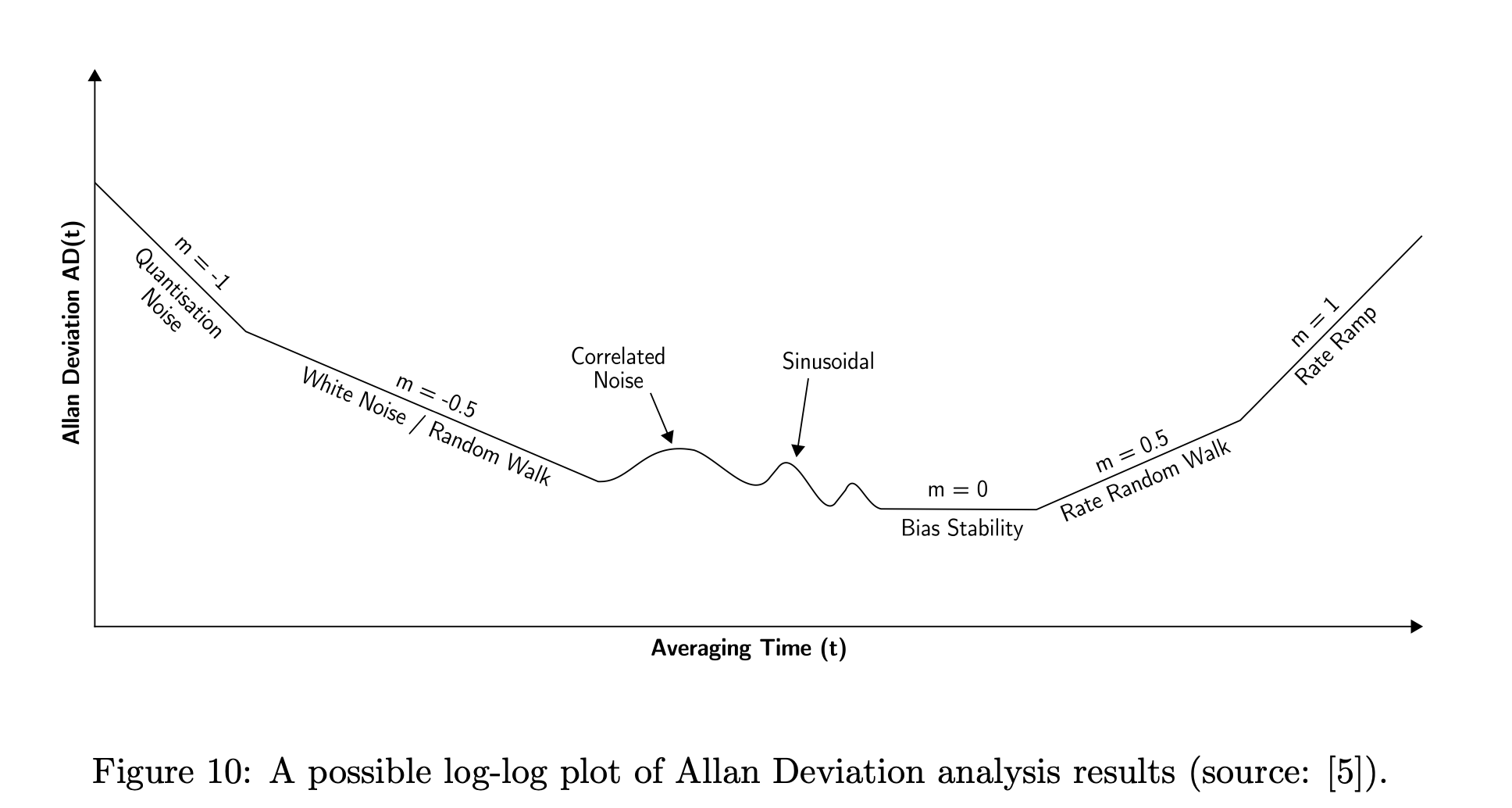
另外,不同的过程通常出现在不同的时间区间,使得它们的出现很容易辨识。因此对于已经辨识的过程就可以直接从曲线中读到它的数值参数。对于一个MEMS设备,我们想测量的重要的过程是随机游走和零偏不稳定性,它们可以按照如下识别:
- 白噪声出现在艾伦标准差曲线的梯度为-0.5的一段。该噪声的随机游走测量(对于陀螺仪是角度随机游走,对于加速度计是速度随机游走)通过拟合一条这样斜率的曲线并读取在t=1时的值来获得。
- 零偏不稳定性出现在极小值附*的扁*区域,数值为艾伦标准差曲线的最小值。
更详细的看文献5.
例子:
6 捷联式惯导
这一节重点关注误差的传播,主要关注下结论。
- For most MEMS devices white noise and uncorrected bias errors are the main causes of an error in the orientation
- proving that errors in orientation propagating through the algorithm are by far the main source of error in the system.
- In practice it is the accuracy of the gyroscopes and not the accelerometers which limit the overall accuracy of most INSs
7 仿真 skip
8 降低漂移
- 传感器融合:比如跟GNSS融合或跟罗盘融合
- Domain Specific Assumptions:比如NHC,比如零速