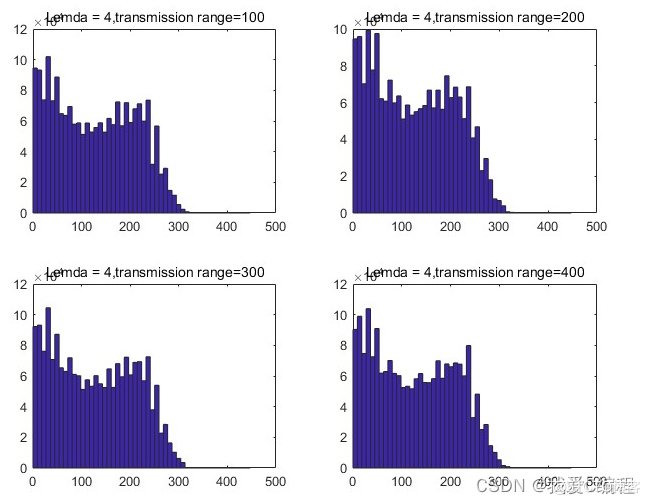
1.算法仿真效果
matlab2022a仿真结果如下:
2.算法涉及理论知识概要
这里根据那个fluid dynamic model 和stochastic model模型,这里使用一种如下的车辆移动模型,能够反映出车辆移动的随机性和连续性。
首先,考虑到第三步骤的实际的问题的仿真,因此,我们在这里,就必须考虑符合实际VANET的车辆移动模型。
第一:要反映出真实的城市道路情况,比如车道,十字路口,速度限制。
第二:正确反映车的运动规律。
针对第一种情况,我们需要考虑节点运动模型,对于第二种情况,我们需要考虑车辆的随机运动情况(类似于论文的stochastic model模型)
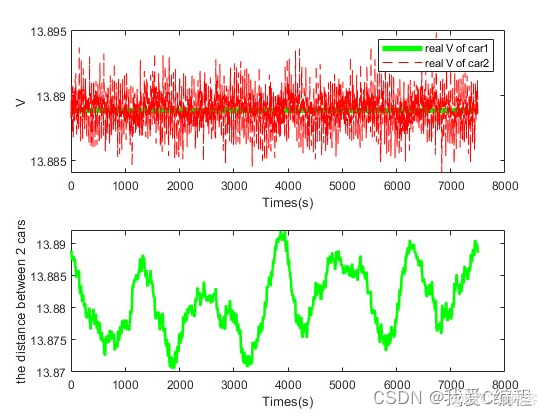
对于任意时刻t,某两个车辆的速度分别为:和,为了保证整个行驶过程是安全的,车与车之间必须保持一个安全的距离,设这个安全距离为。那么相对于前一个车辆来讲,后一个车辆的安全速度为:
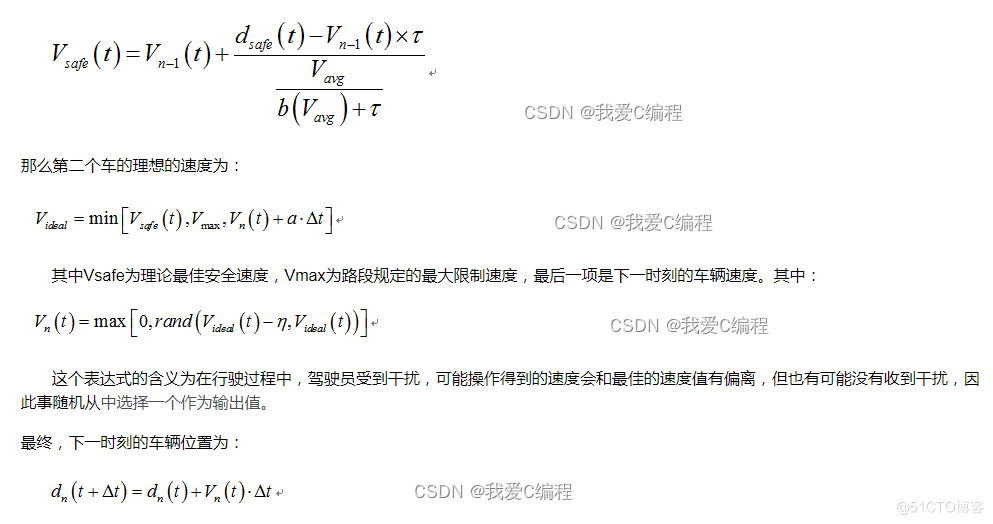
从宏观角度考虑,那么就是整个车道网络中,车流的移动情况,这里我们使用如下的数学原理:
宏观移动模型,将道路拓扑视为任意方向的街道并任意连接而组成的网络图。两个拐角之间的街道定义为块。将一个块上的一组车辆视为一个单元,该单元的车辆共享一组参数:速度 v,车流密度 k 和车流体积 q = kv。
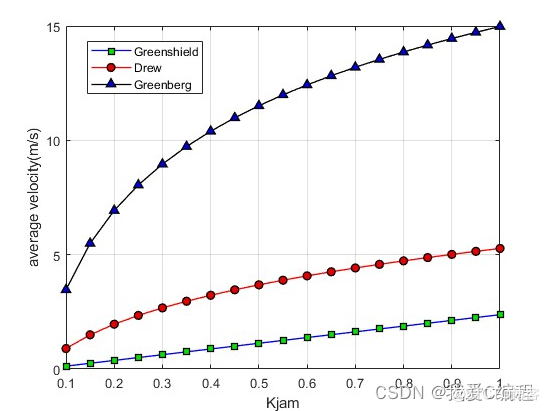
将车流视为典型的流体后,车辆的速度和车辆密度的关系为:
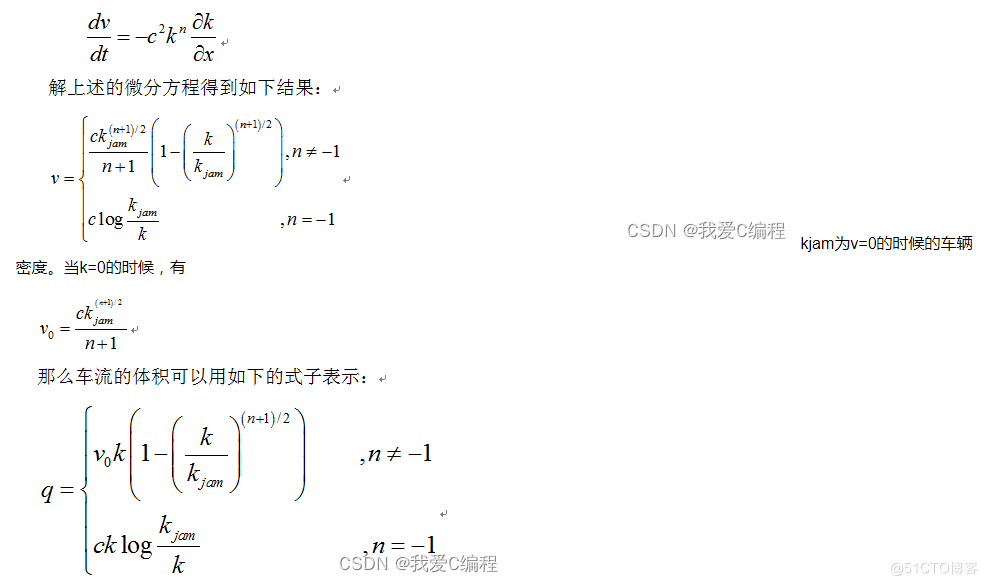
针对不同的road segment。
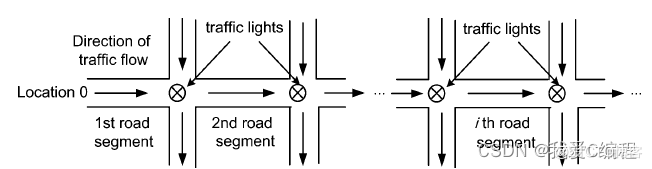
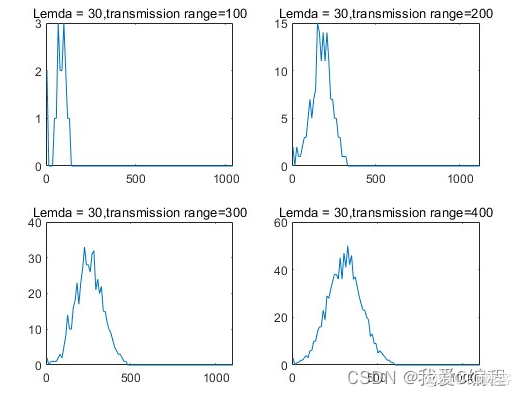
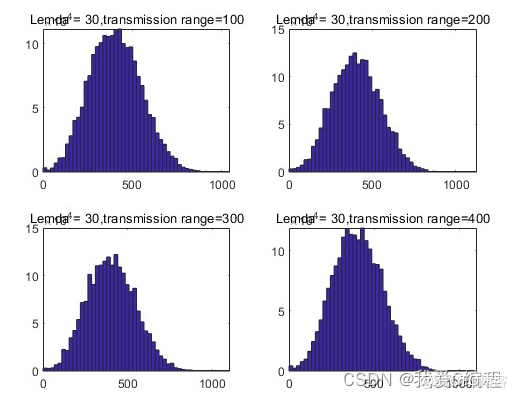
对于每个road的segment,我们使用随机模型,将直线路线上的车流进行分流,即满足一定概率的车流左右转弯,而同时,由于一定概率的车流会从垂直的线路行驶入直线线路上。这个过程我们使用随机过程分析,假设每个车流得到每个路口的时候,会以0.5的概率继续向前行驶,以0.25的概率左右转弯。然后车辆对这三个方向的判断,满足泊松分布。
3.MATLAB核心程序
%分析Kjam和流量的关系;
q1 = zeros(1,length(Kjam));
q2 = zeros(1,length(Kjam));
q3 = zeros(1,length(Kjam));
for i = 1:length(Kjam)
n = 1;
V0 = c*Kjam(i)^((n+1)/2)/(n+1)/(n+1);
q1(i) = V0*k*(1-(k/Kjam(i))^((n+1)/2));
n =-0.5;
V0 = c*Kjam(i)^((n+1)/2)/(n+1)/(n+1);
q2(i) = V0*k*(1-(k/Kjam(i))^((n+1)/2));
n =-1;
q3(i) = c*k*log(Kjam(i)/k);
end
figure;
plot(Kjam,q1,'b-s',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.0,0.9,0.0]);
hold on;
plot(Kjam,q2,'r-o',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.0,0.0]);
hold on;
plot(Kjam,q3,'k-^',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.0,0.0,0.9]);
hold off;
grid on
xlabel('Kjam');
ylabel('Q');
legend('Greenshield','Drew','Greenberg');
%%
%步骤二
T = [0:1:7500];%全部为绿灯的情况
V1 = zeros(1,length(T));
V2 = zeros(1,length(T));
Vsafe= zeros(1,length(T));
Videa= zeros(1,length(T));
dsafe= zeros(1,length(T));%车辆之间的安全距离
Dxd = zeros(1,length(T));
V01 = 50000/3600;%前一辆车子的初始速度
V02 = 50000/3600;%前一辆车子的初始速度
a1 = 0;%前一个车子加速度
a2 = 0.01;%后一个车子加速度
Vmax = 80000/3600;%公里最大限速
d1 = 0;
d2 = 0;
............................................................................
figure;
subplot(211);
plot(T,V1,'g','linewidth',4);
hold on
plot(T,V2,'r--');
hold on
xlabel('Times(s)');
ylabel('V');
legend('real V of car1','real V of car2');
subplot(212);
plot(T,Dxd,'g','linewidth',2);
xlabel('Times(s)');
ylabel('the distance between 2 cars');
%出现红灯,减速
T = [0:0.01:60];%全部为绿灯的情况
V1 = zeros(1,length(T));
V2 = zeros(1,length(T));
Vsafe= zeros(1,length(T));
Videa= zeros(1,length(T));
dsafe= zeros(1,length(T));%车辆之间的安全距离
Dxd = zeros(1,length(T));
V01 = 50000/3600;%前一辆车子的初始速度
V02 = 50000/3600;%前一辆车子的初始速度
a1 = -0.5;%前一个车子加速度
a2 = -0.47;%后一个车子加速度
Vmax = 80000/3600;%公里最大限速
d1 = 0;
d2 = 0;
..............................................................................
figure;
subplot(211);
plot(T,V1,'b','linewidth',2);
hold on
plot(T,V2,'r--');
hold on
xlabel('Times(s)');
ylabel('V');
legend('real V of car1','real V of car2');
subplot(212);
plot(T,Dxd,'b','linewidth',2);
xlabel('Times(s)');
ylabel('the distance between 2 cars');